That’s kind of the feature that is being implemented at the moment
User holds throttle all the time
Boogie will follow the user in a certain distance
2 Likes
In theory I agree.
In practice I doubt someone can seriously claim to properly surf a wave and at the same time keep track of what the tow boogie is doing behind them.
Add one other foiler who can pump to the outside and it is a mess.
This works if all people, who are possibly affected are aware of the situation and agree to it.
If you have people present that do not know or do not agree, its a serious problem.
And how would you keep track?
This has a good chance to completely ruin any foil assist access to spots.
1 Like
i saw a guy using it in line up with around 20 surfer that was not really aware of the zero tow, the guy surf about 6 diferent day and nothing happen, so please trust me when i say it is working for some one that is aware of danger and do what is safe fore every one your theory is theory but what i saw was real and no accident.
I am not even sure what you are trying to say.
So you have a sample size of one person at one spot on 6 days.
And what is your conclusion from this?
I agree its is not so much of a problem, that it will create accidents every single instance.
That does not make it safe.
I have seen the same when SUP’s entered surf spots.
It is enough, if some people can not handle the situations involved, to ruin it for everyone.
Not saying it should not be done (“follow me” that is, not like I have any say) but to consider the problems in a realistic way.
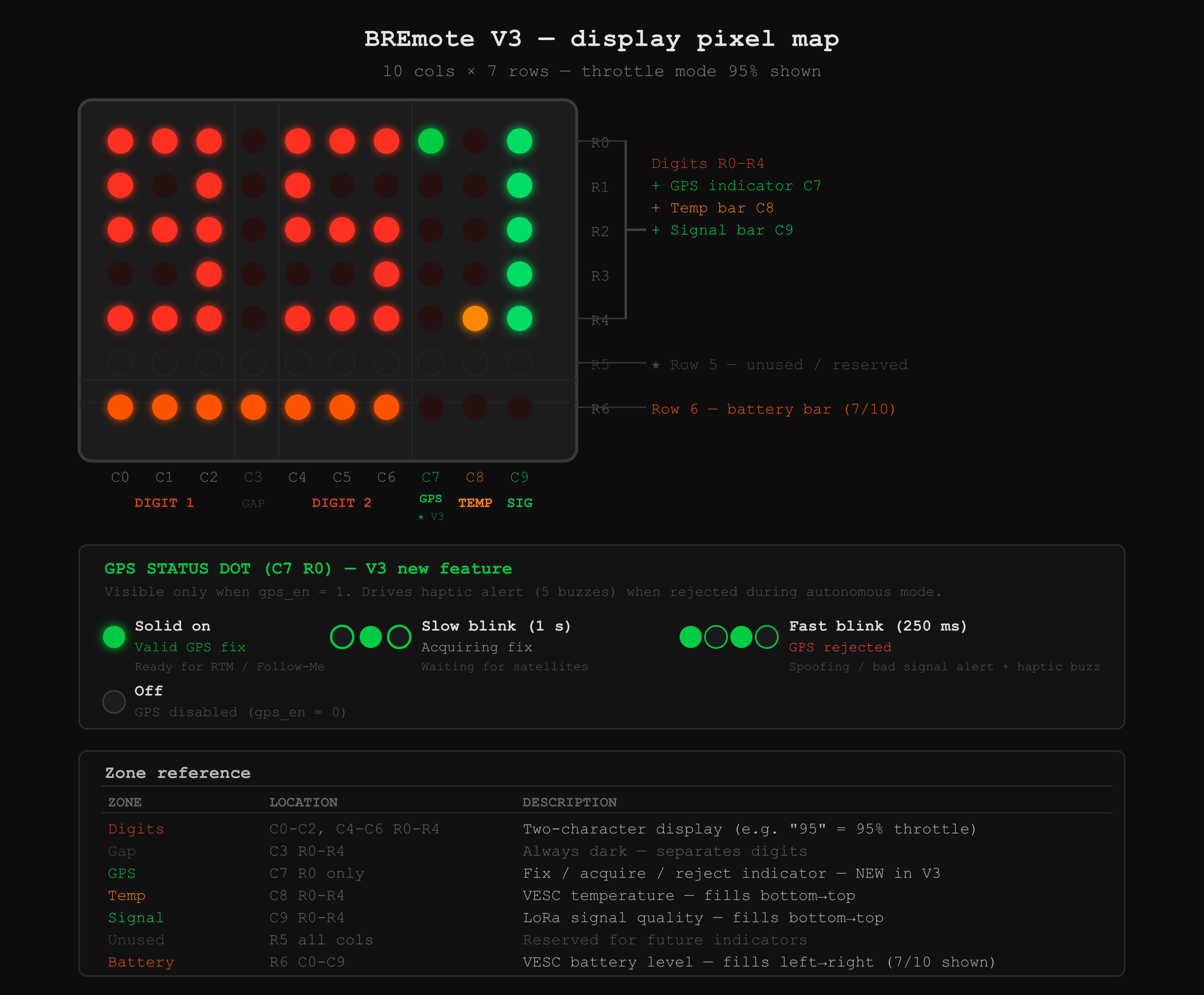
Will there be protection against GPS spoofing?
1 Like
Not in the first release, also it’s not planned to implement that yet
🚀 Teaser: BREmote v2.5-Evo Beta — GPS, Anti-Spoofing & Data Logging
Hey everyone,
I've been working hard on a major upgrade to the open-source BREmote project. Building upon the incredible original foundation by LudwigBre and the V2 web console additions by Janrusher, I am getting ready to release BREmote v2.5-Evo.
The code is currently in Beta. I have successfully conducted and passed all bench tests for every commit, but my own dual-motor tow buggy is currently out of commission while I wait for new motors and a VESC. Because of this, I haven't been able to do a full on-the-water field test yet—and I am looking for a few beta testers to help verify the hardware in the wild!
If you have a working buggy or eFoil running BREmote with both GPS (and compass o RX) / VESC setup and want to test the newest features, let me know! I will be uploading the full source code, wiring diagrams, and the v2.5-Evo Config Studio to my GitHub very soon.
(Follow this GOOGLE FORM * to add your info. For now, let's discuss features, requests or questions here in this forum.)
🔥 What’s New in v2.5-Evo?
- Fully Working TX/RX GPS Integration: Speed is now displayed directly on the handheld remote in km/h, mph, or knots.
- Advanced GPS Anti-Spoofing & Safety Gates: v2.5-Evo introduces rigorous safety checks. The remote cross-checks the TX and RX GPS coordinates to confirm the signal is authentic and the distance behaves as expected.
- Integrated Flash Data Logging: Ludwig built the core data logger in the DEV branch, and I have built upon it by adding physical AUX button control, LED flash indicators, and the ability to download your logs directly over WiFi via the web console. (the WebConsole has been updated as well for both TX and RX)
- V3 Config Studio: A brand-new, offline HTML configuration tool. It lets you change all TX/RX parameters via plain English labels, export configs, and download your data logs over WiFi without needing to memorize hex codes.
- Return-to-Me (RTM) & Follow-Me (FM) Frameworks: The compass and GPS logic for autonomous tracking are fully operational in the beta. (Note: As always, the buggy will only move when you actively pull the throttle trigger. Safety first!)
Let me know your thoughts or if you have any questions about the new architecture!
☕ Support the Project
I develop BREmote v2.5-Evo in my free time to give back to the eFoil and Tow Buggy community. Developing and maintaining this firmware requires countless hours of coding, bench testing, and purchasing hardware. For example, I am currently raising funds to buy a new VESC 72500 v2 for my 2nd motor to get my own buggy back on the water.
If this firmware has helped you out and you'd like to support the ongoing development, bug fixes, and hardware testing costs, consider leaving a tip here: ko-fi.com/monterman.
All donations go directly back into funding replacement parts and developing requested features. No pressure at all—enjoy the ride!
5 Likes
Fantastic work! What are the hardware requirements, other than gps bn220 on the TX?
Thanks! I’m super excited about how this is coming together.
To answer your question, here are the exact hardware requirements for the GPS integration depending on if you are building the TX (Remote) or the RX (Receiver on the buggy/board):
For the TX (Handheld Remote): You don’t need a compass for the remote, so you can use smaller, standard GPS modules.
- Beitian BN-220 (Find it on AliExpress / Amazon)
- ** HGLRC M100_MINI GPS** (Features the newer M10 chip: Find it on HGLRC)
- (Note for the future: Once V2-Evo is fully polished, my next development goal is porting this code over to the smaller Nano hardware as well!)
For the RX (Receiver on the buggy/eFoil): For the RX, you must use a module with an integrated I2C Compass. This is absolutely critical for the optimal routing and heading calculations required for the autonomous Follow-Me (FM) and Return-to-Me (RTM) modes.
- Beitian BN880 (Find it on AliExpress / Amazon)
- HGLRC M100 PRO (Features the M10 chip + QMC5883L compass: Find it on HGLRC)
So, go grab one of each of those to add to your TX and RX setups!
![]() NOTE ON TROUBLESHOOTING: To make hardware testing easier, I also added some new commands to the Serial Console! You can now use:
NOTE ON TROUBLESHOOTING: To make hardware testing easier, I also added some new commands to the Serial Console! You can now use:
?printgps?gpsreint?gpsraw 5(and?gpsraw 10)?i2c(Use this specifically to test your wires and ensure your compass is being detected on the RX!)
Let me know if you have any questions on the wiring once your parts arrive!
4 Likes
This all sounds fantastic. Thanks a lot for your efforts on this. I will be excited to try it. I’m mid way through building another tow boogie so don’t have anything currently working but will be adding this once ready. I use two ESC’s, not VESC. Is that a problem? I know I won’t get all of the logged info.
Also, will you have the time to create how to videos on the key build stages for the v2.5-Evo?
I think it should work without a vesc. some telemetry can still be read, if VBAT is connected for reading the boogie’s battery status and forward it to the BREmote display. I don’t think there is a way to measure the RPM or eRPM without a dedicated port on the RX to one of the motor phase wires.
However with a GPS such as the BN-880 with Compass, you will be able to tell speed and heading.
I will add some checks to my plan for programming for non VESC esc.
There will be a full guide for instructions on every relevant section. It’s going very well. Perhaps I’ll also do a video… It’s not a priority but the guide will be fully written at launch.
4 Likes
Great. Thanks for the update.
So is this the same as the follow me that was announced before or is this a complete separate development?
Separate development
Are both developments using the same GPS hardware like BN-880 for the RX?
I just finished my BREmote V2 build with the BN-220 integration and starting to plan the RX side to use a servo for rudder on Tow Boogie and keen to order the stuff needed.
We are currently looking at BZ 251 for Rx and BE-180 for Tx
BE-180 vs BN-220 is a newer chipset and higher responsvieness
Generally a problem is the supply voltage on Tx, we operate them at 3.3V while most of them are nominally only 5V rated… so needs more testing
1 Like
Ok damn just put a BN-220 in the TX ![]()
I guess I just need to build a new TX later ![]()
I think both 220 and 180 will be fine for the application, on water the difference is less since there are no obstructions from houses, trees,…
1 Like
Ah yeah ok cool if the dev supports both/different modules and one could upgrade to have more granularity that would be ideal.