Hi everyone, I’m having trouble configuring the Servo Steering feature of Bremote. I’m in the final stages of completing the kit, and everything else works perfectly except for the Servo Steering. Any help or guidance you can provide would be greatly appreciated.
To troubleshoot, I first configured the throttle-only feature on both the receiver and transmitter and set it up on VESC. After some tweaks, it worked flawlessly. Then, I enabled #define SERVO_STEERING_ENABLED in the receiver and #define STEERING_ENABLED in the transmitter, and re-calibrated everything. However, there are no voltage readings or servo movements at the steering servo connection.
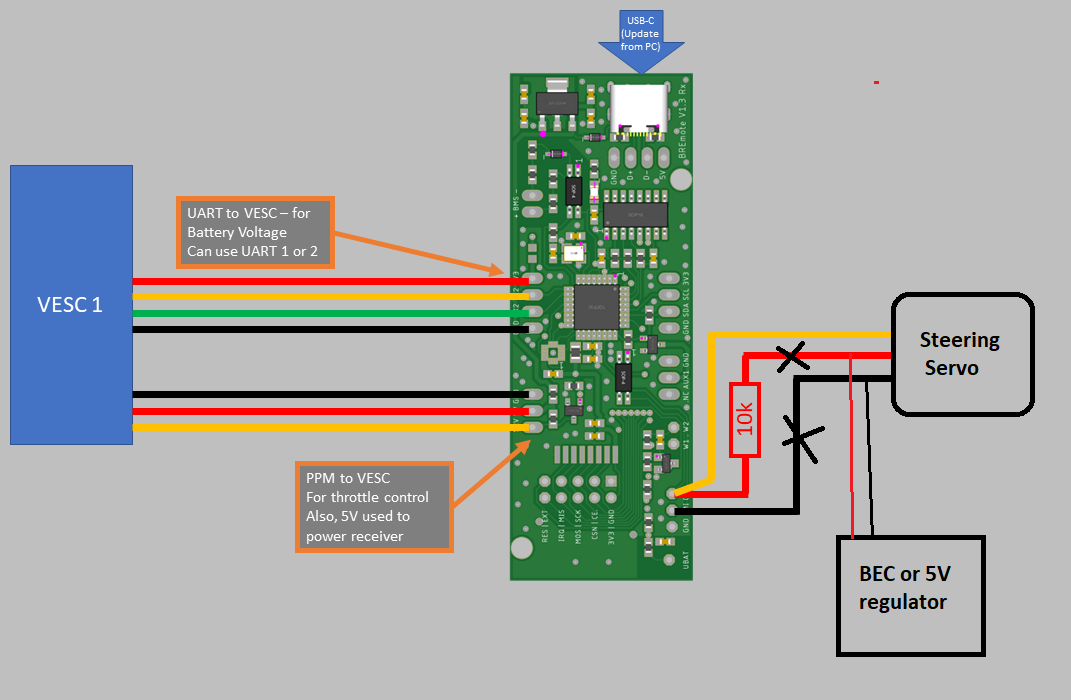
I checked all solder joints and continuity in the lines, and ensured there’s a 10K resistor inline with the red wire as per the wiring diagram. In place of VESC2, I placed a servo to control rudder. I’ve watched all of @ludwig_bre 's YouTube videos, and understand that the throttle needs to be pressed while using the toggle switch to steer, but this isn’t working for me.
On a side note, if you noticed in my previous post, I’ve switched from dual VESCs to one big VESC to save money and reuse parts from my prior eFoil build.
My setup as of now is as follow:
FSESC75350 (yes I know its over kill)
Two Outrunner 6384 120KV
10S6P batteries
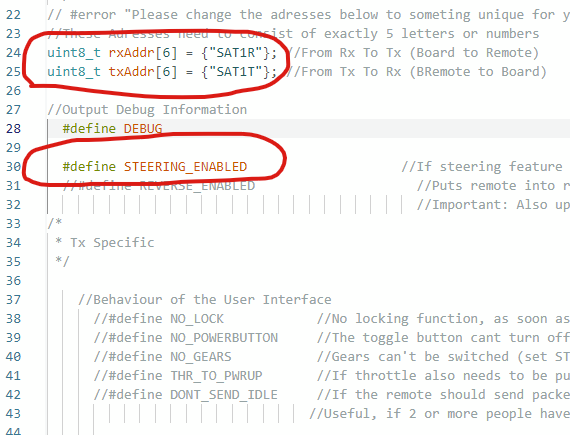
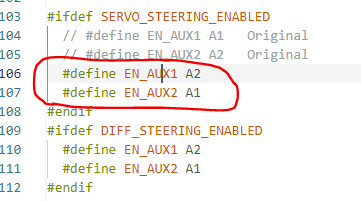
Shared_Config for transmitter: Circled areas I made a change from default file
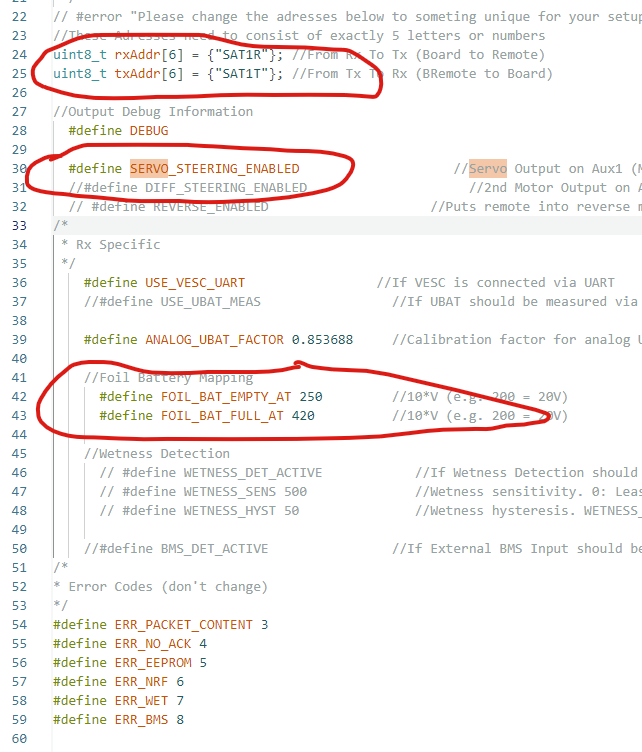
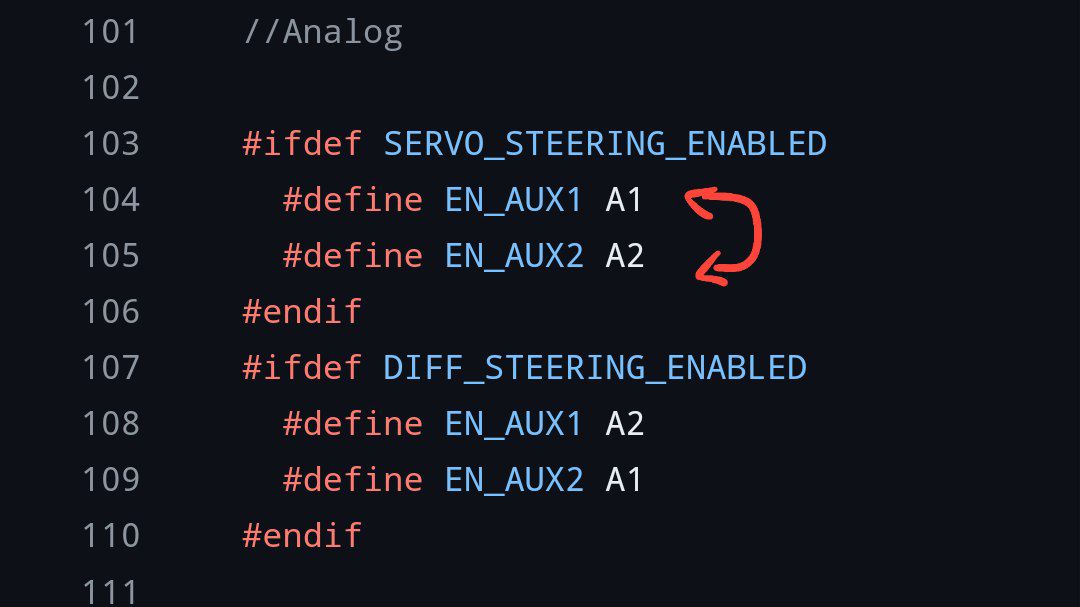
Screenshot of Share_Config for Receiver: Circled areas I made a change from default file
I think you have it wired up for dual motors and not steering. I believe it’s a different setup for steering.
I would double check how to configure for servo usage.
Edit: if you are doing dual motor, you want to use differential steering not servo steering and you are wired correctly. Update your code for differential steering.
Comment out the serv_steering and uncomment diff_steering
@Jesserosco first of thank you for responding. Initially i was planning to replicate your speed differential setup with two escs, but to save money i returned the escs and using single beefy 75350 esc from previous efoil build, reconfigured it to run two 6384s with servo and rudder. I changed the configs of receiver & transmitter according to Ludwigs videos, and posted snap shots of configs in op, but no luck with servo 2nd wires. I don’t know if i missed any other settings in config, but I’m almost 100% sure wiring is flawless, it’s either the settings or the receiver.
I updated my original post to indicate I’m using servo instead of second vesc
I am almost positive the wiring for servo steering is different than differential. I am searching, but you can see in this video there is a resistor connected across and to different pins, but this could have changed to be the same at some point. Guess we can wait til @ludwig_bre schools us up.
How are you getting 5v from the servo to the RX if you are using this wiring setup? The one that goes through the 10k resistor? The RX doesn’t supply power to the servo. I think you need a jumper wire from the 5v and gnd from the VESC ppm to get power to the servo.
Could you please explain how to resolve the issue of "missing a BEC for the Servo to supply it with power"? Specifically, should I connect the red wire with the 10K resistor to the red 5-volt line to the PPM of Vesc1?
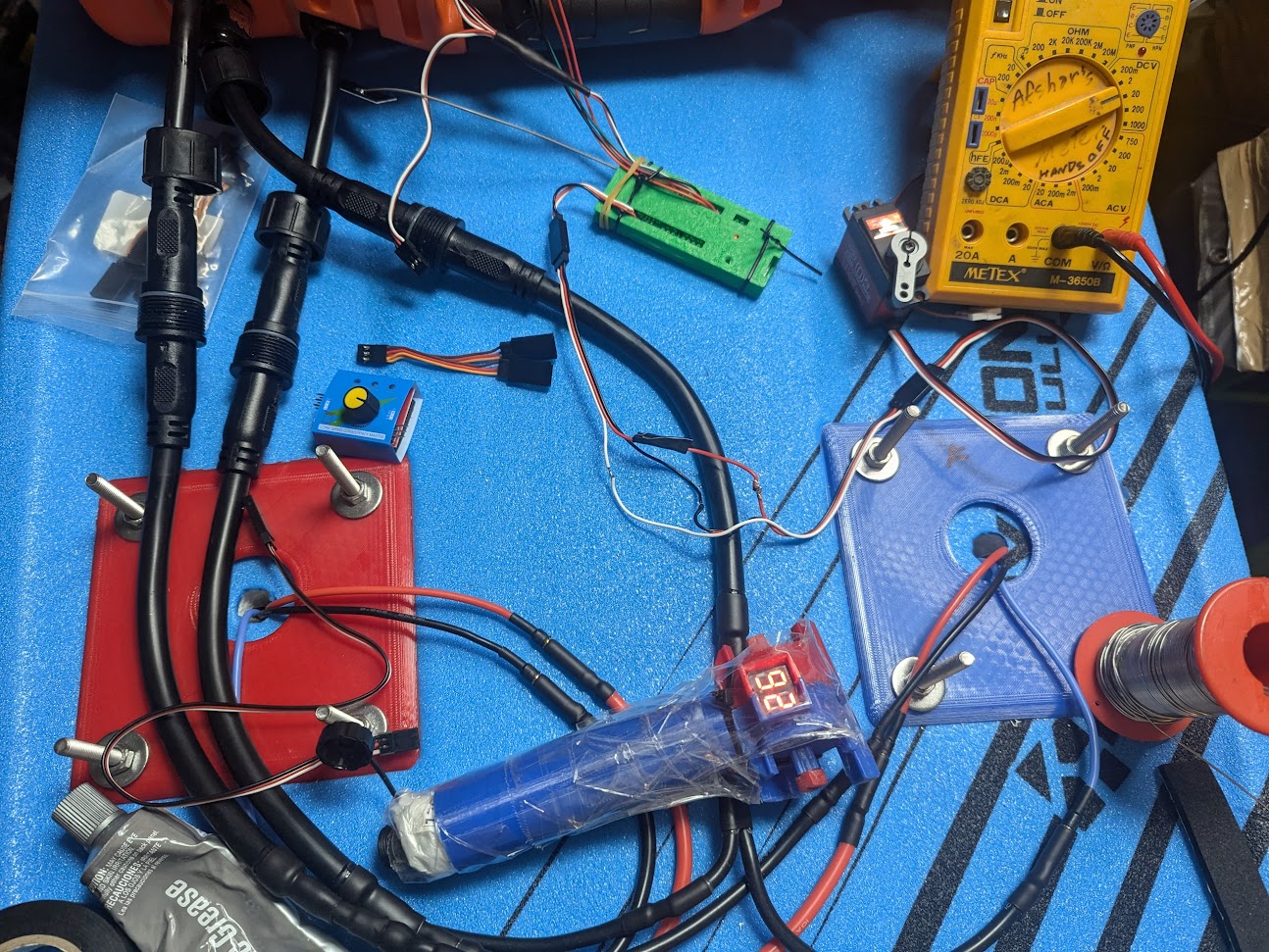
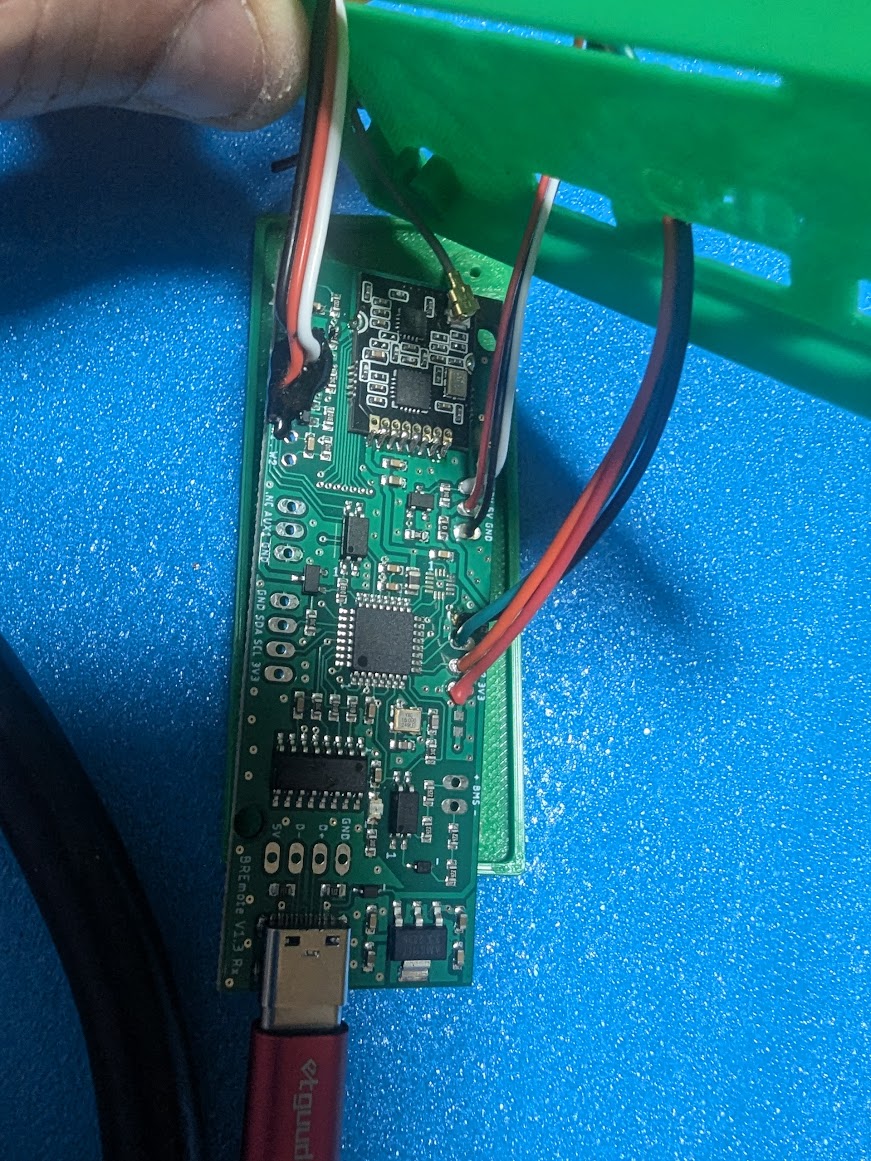
When I ordered the remote, Jasmin from Openfoil made the connections for me. It appears he installed the 10K resistor from the white wire to the red wire, which is covered in glue. I verified the resistor with an ohmmeter. Please see the photos below.
Do I need a separate connection to power up the Servo? If so, could you please let me know where I should make the connection? My board is Version 1.3.
I also revised EN_AUX1 to A2 and EN_AUX2 to A1.
Thanks.
You don’t need to alter the connection that Jasmin did
But in parallel to the servo, you need to attach a voltage regulator, called BEC, with a Y harness cable. This will take the raw battery voltage and convert it to 5V for the servo.
The Rx does not and can not put out any voltage for the servo itself, it needs to be supplied from external
BTW I am also quite sceptical if two BLDC in parallel on one ESC will work, each motor needs its own controller, they usually can not be put in parallel, even if they should run at the same speed. With this setup (both in parallel) you will likely kill the motors or ESC
Thank you @ludwig_bre and @Jesserosco for your guidance. You were absolutely correct; I was not supplying the steering servo with voltage. This is my first time working with servos. I connected the wires Jasmin from Openfoils did directly to the servo and expected it to magically work
Two more questions:
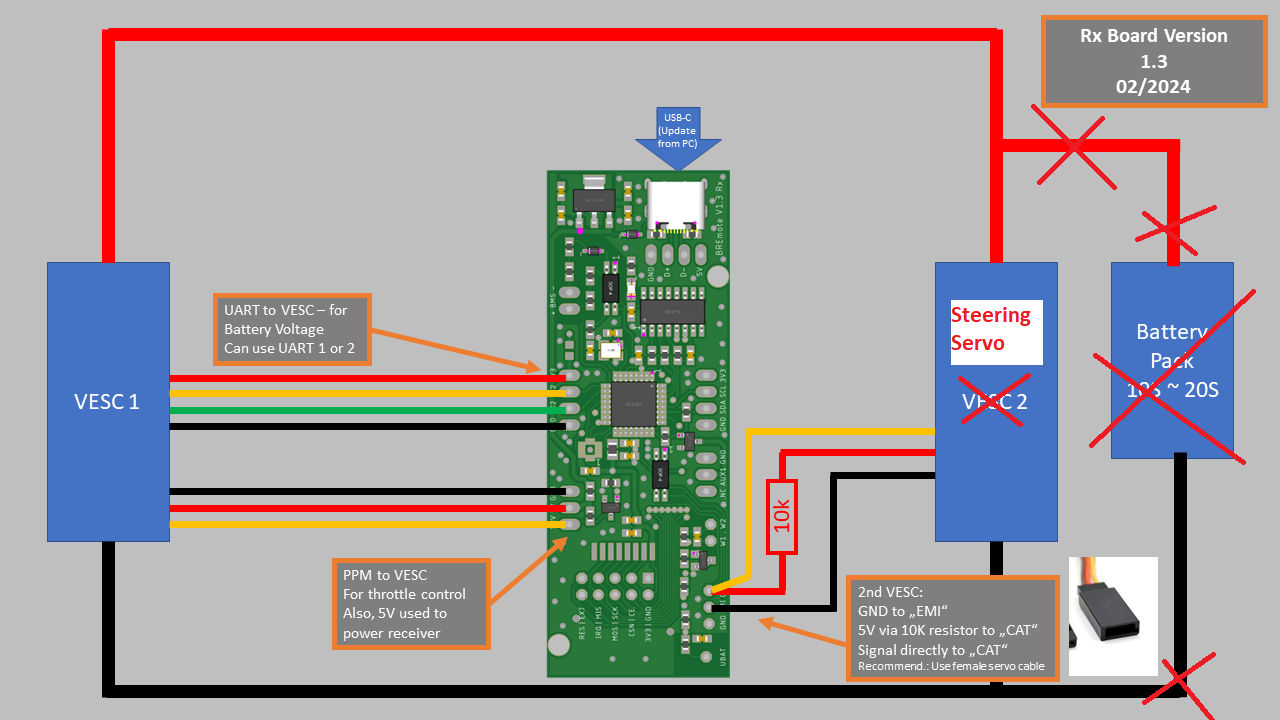
If I supply the load from the regulator and only keep the white signal wire intact, do I still need the existing black and red wires that Jasmin set up for the steering servo or could I omit them from the connector as shown in image below?
The other question is, if someday I go back and install two VESCs for differential speed and eliminate the steering servo, do I still need the BEC to supply voltage to PPM of the VESC 2 (similar to servo steering) or external BEC is not needed?
Yes, you still need the red and black wires too
So other than the two “X” your drawing is correct
If you go back, as long as you use a VESC you don’t need a BEC, as the VESCs have that built-in. But most “normal” ESCs (Fly color X cross e.g.) don’t so for those you would need that.
Thank you @ludwig_bre@Jesserosco for your help. You certainly raised my IQ by few more points : D
I am all set, I tested the steering servo with external battery and worked perfect, so I went ahead and ordered 5v step down BEC to finalize the setup.
Edit: Yes at some point I plan to build the differential speed similar to @Jesserosco if my Aliexpress Fly color X ESCs parts arrive in this life time