I am new to the team, and let me start by saying that what you guys are doing here is simply amazing, I am so impressed and inspired. Thank you all for sharing your ideas.
I thought I would contribute on the gear subject. From what I understand the PLE gear that is used is intended originally to increase the torque of stepper motors, that is why it is designed for low speeds and high accuracy (no backlash) which is the opposite of what we need.
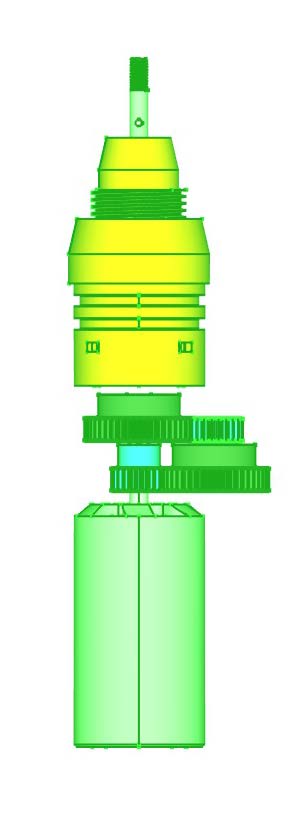
I thought we can build a simple gear with a 4:1 or 5:1 ratio in 2 stages as in my simple design where I took @pacificmeister design and replaced the PLE gear with 4 gears.
It is still missing something to support the gears, bearings etc… and of course a housing for it which can be filled with oil and sealed with a dedicated rotary lip seal on the shaft. The gears will have to be helical which work better in high speeds (I did not model it with helical gears as it is more difficult on the CAD I have).
The down side of course is that it increases the dimension of the assembly but the gear housing exterior design can be streamlined so it will not increase drag significantly.
Gears are taken from : KHK - Spur Gear Selector
I would like you guys to tell me why this is NOT a good idea. If I am convinced it is not a good idea – that was a good help. If I am not convinced I will make a more detailed design and estimate the cost to manufacture this part and then we can all take a more educated decision if this is a good idea.
Awesome work! Stumbled across this forum a week or so ago and after comparing all the different options I am also wondering if simplifying the gearbox down could be a good contender. I’m hesitant to be importing expensive reduction drives with long lead times which have a limited lifespan.
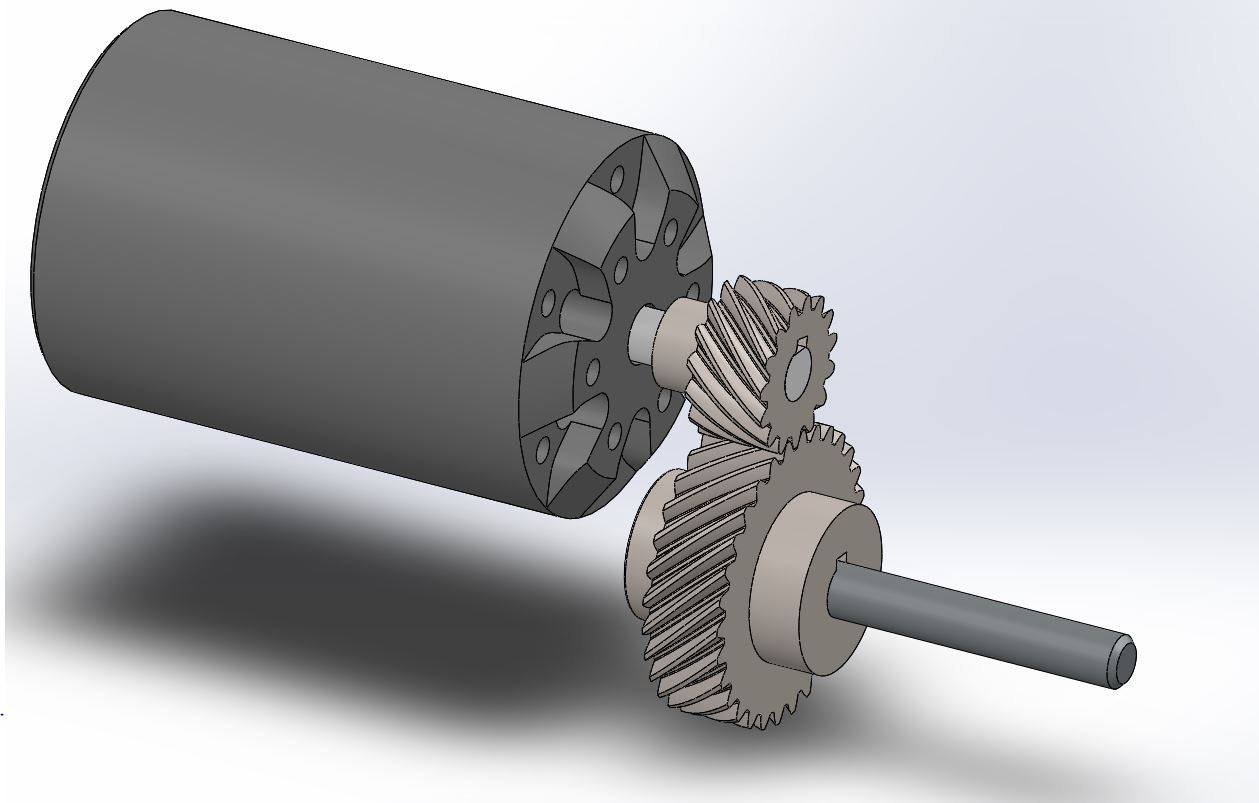
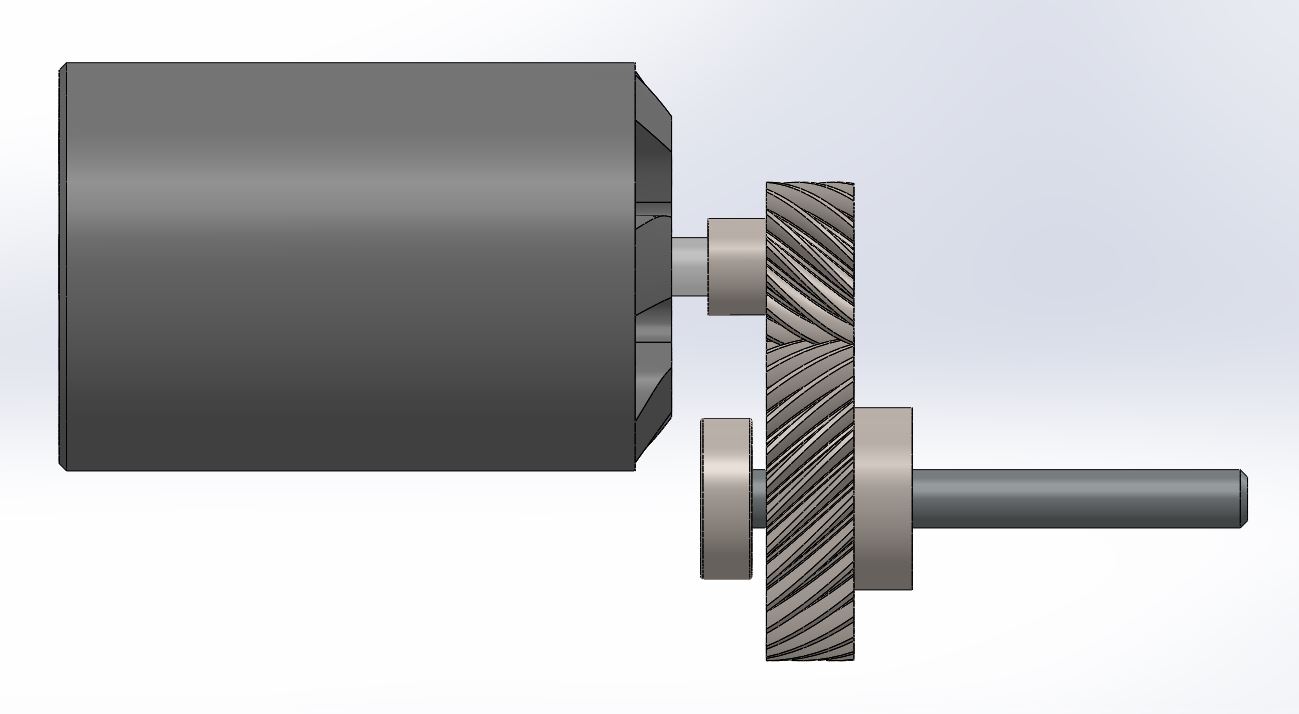
I’m definitely no expert but if you were to use a 360kv SSS 56114, would it not be possible to run a simple 2:1 or 2.5:1 reduction (similar to @pacificmeister’s timing belt concept) using helical gears? This would eliminate the need to tension the belt while keeping a relatively low form factor. I mocked up an example below using a 15T - 30T configuration
The biggest issue I can foresee is sealing the housing reliably. But would be keen to hear what some of the group has to say about the whole idea.
I understood that the reduciton needed is at least 4:1 or else either the RPM of the prop would be too high or if you run on low voltage the effitiency would be very low. I may be wrong though so take this with a grain of salt. I had a similar concpet to yours with a 2 stage helical gear design that will provide a 4:1 ratio, as in the picture: Uploading: 2 stage diy gear.png…
The form factor can be reduced by using an internal gear for the larger gear.
BUT at the end I have decided that it will be too much wrok and too expenssive to design and produce such a gear so I dcided to pruchase a gear and risk the short life time.
We discussed this previously, even idea of inner gear runing on “outside” gear to bring diameter inline. But 2 bulky, 2 many parts to fail and simpler gearboxes (which a lot of people here use) already exist and are more compact. (apex, reisenauer) Also 3D printed with metal pinions are cheaper solution which looks like its working very well. This could maybe work very well without stressing whole thrust unit 2 much but inrunner has to be fairly low kv for current findings and prop results. Only low kv inrunner i saw was aps 56115 but max current is 50A which is hm, a bit worrying i would say. When that magic inrunner for our use gets built, i think there will be a solution for a direct drive rather than gearbox. Rpm’s look alright (with current info on forum regarding used props) on 2.5:1 reduction but will it be enough torque? Almost half torque down (and more) in comparison to other setups.
Makes sense to use the existing gearboxes if they are working well. My concern is mainly to do with build cost. Do you have the link for the thread where this has previously been discussed? Would be good to read through it