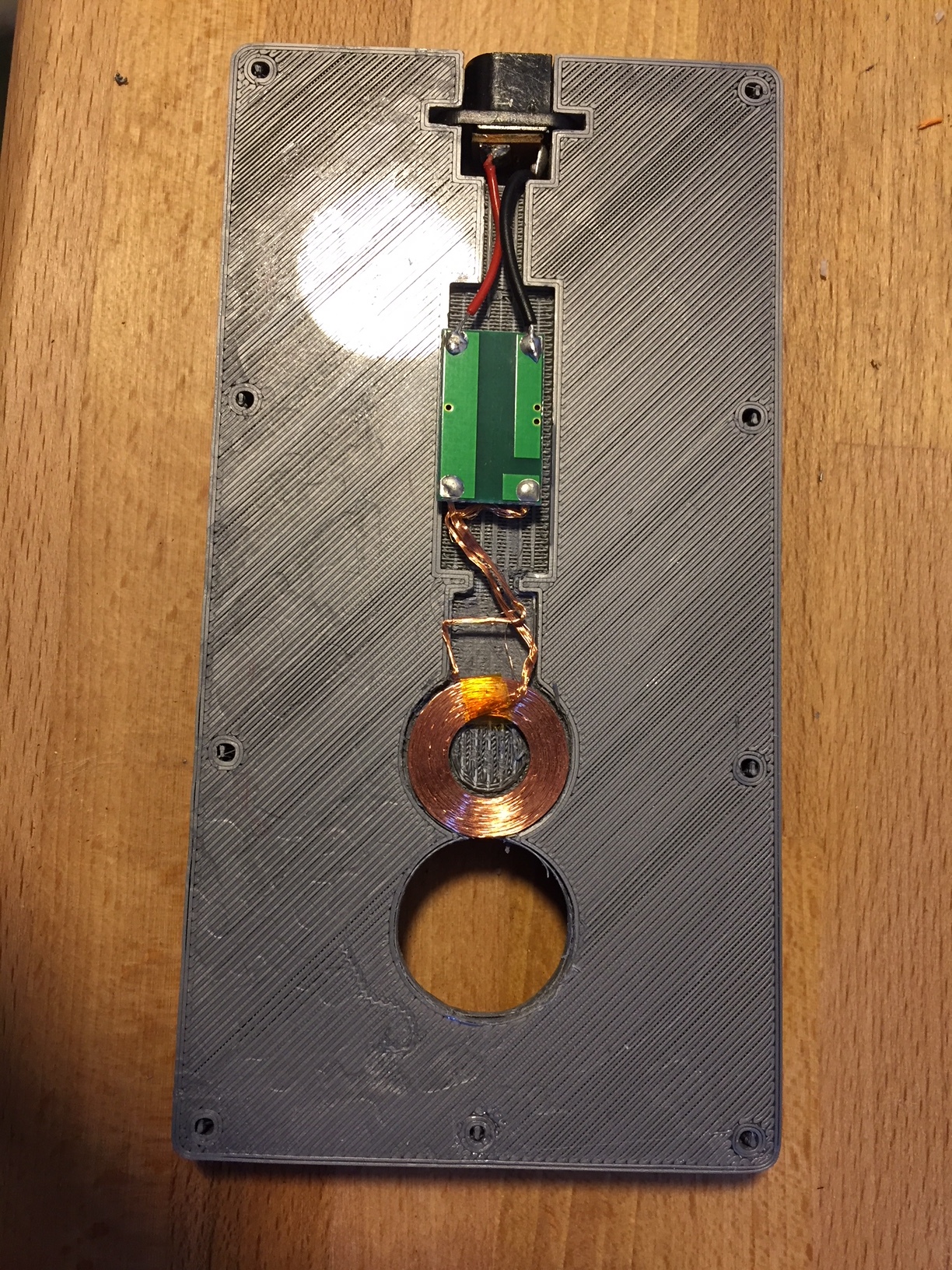
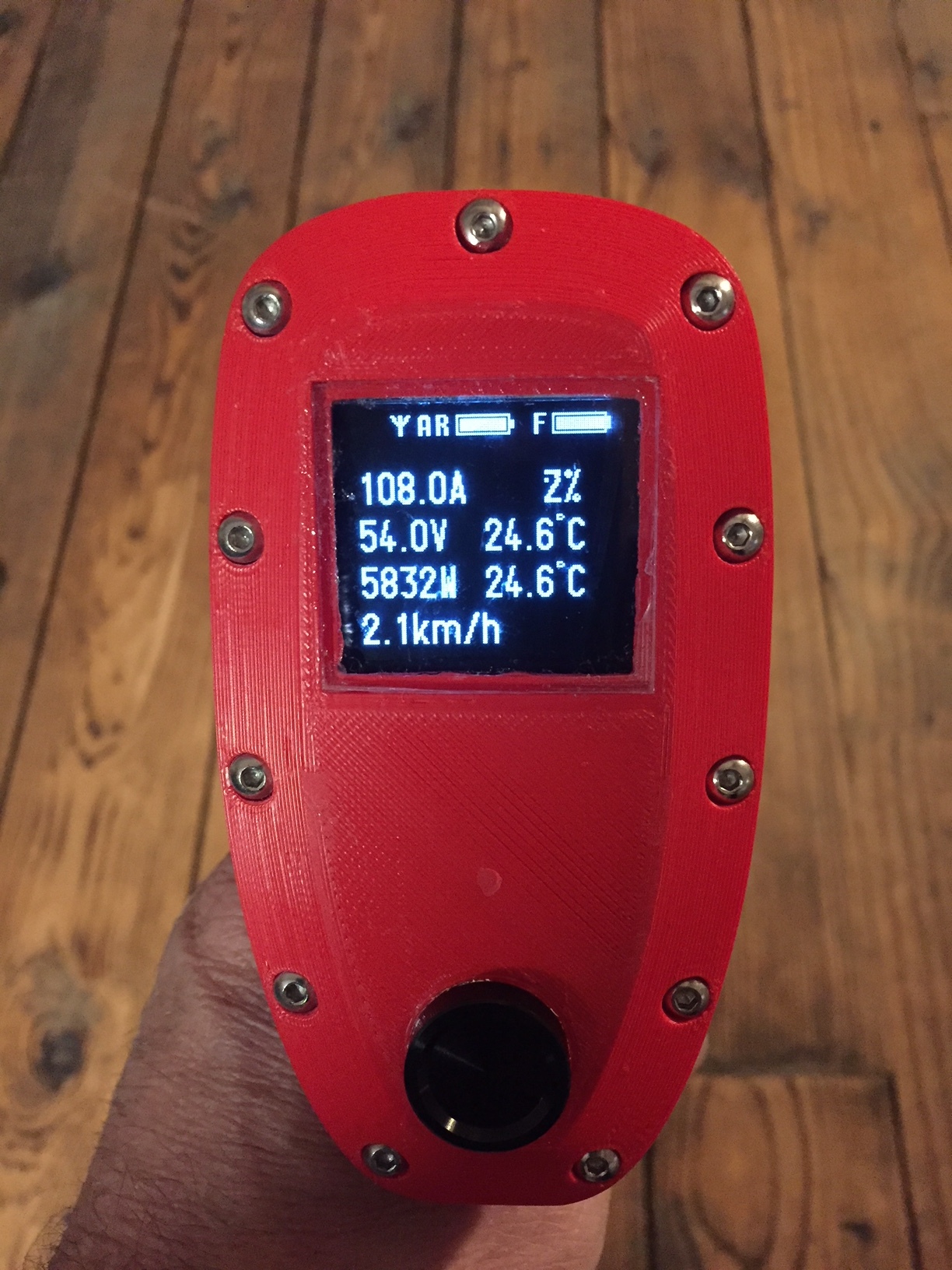
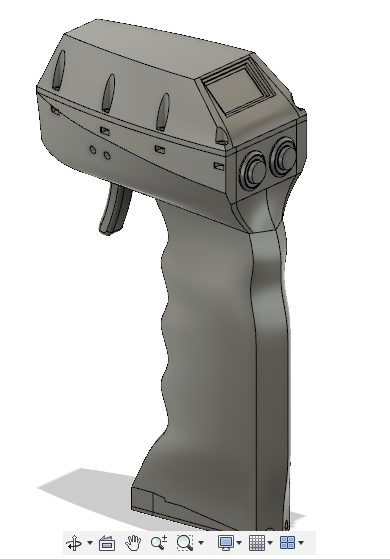
Quite a long time after I started, finally my adaption of the Hiorth remote hand set (thanks for the step file). Added a 128x128 OLED. It was the maximum I could fit in and the brightest one I found. It has a relatively slow update rate because of the I2C but I think it is OK for the purpose. I was not happy with different momentary switches I tried, waterproofing was an issue. I now use a piezzo switch which is 100% waterproof as the top is made of one piece. It only creates a short pulse when you push it so you need a LiPo charging board that can be switched on and off with pulses. One puse = on, two consecutive pulses = off. I also added wireless charging to keep things waterproof. It gets hot but not above 50°C, I needed to adjust the gap between the coils to control max current (more current -> more heat). If you use wireless charging it is important to shield the electronics behind the coil from the magnetic field, there is special thin flat ferromagnetic material for this purpose but it is expensive and difficult to get so I just used magnetic steel sheet from an old amplifier. As a micro controller I use an arduino nano with nrf24. There is one available with the nrf24 on board, this is much easier than connecting a separate nrf24 (but the wiring cannot be changed). As I’m sure the sw needs still some tweaking, I connected the serial port of the arduino to a modified HC-05 bluetooth module which allows programming over bluetooth. This way it can be reprogrammed without opening the enclosure. the BT module can also be used to log data to a pc or even an android phone with serial over Bluetooth. Battery is a 1500 maH Lipo, it lasts about 8-10 hours.
The receiver side is still on a breadboard, it uses the same arduino with built in nrf24. I added 2 temperature sensors which use the one-wire-bus. Battery level will be measured through a voltage divider, it is simulated with a pot at the moment. Current will be measure with a hall sensor, it’s also simulated with a pot. There is also a GPS module connected to the receiver over sw serial. All values like time, speed, position, temp, current, battery voltage are sent to the hw serial port where an openlog logger is connected. I also plan to read rpm from the ESC with a brushless RPM sensor.
I’m quite busy at the moment but I hope to find some time to create a git repository with all relevant information.



Is it waterproof? First test.
Wow! Excellent job @sat_be I will follow this thread now with great interest  what type of ESC are you using?
what type of ESC are you using?
Plan is to use a 240A FLIER ESC which I bought a while ago. I haven’t tested it yet.
Is it possible to review the Arduino code? I am planning a similar approach.
I’d be interested in the code for the battery indicator. I have finished my remote control, but the programming is not ready yet.







looks really clean, clever waterproofing solution with foil keys, nice build. My code is still a bit messy I need to clean it up before releasing. For both battery indicators I use an Analog Input, 3,7v means empty, 4.2v means full (44 and 50v for the foil battery). I then draw a filled rectangle with the u8g2 lib according the measured level into the empty battery symbol. The empty battery symbol is drawn with two rectangles, one for the battery and one for the plus pole.
I plan to display ESC temperature, battery temperature, current, battery voltage for Remote and EFoil. I haven’t programmed the keys yet. Only the power button can be used for switching on (longer pressing) as well as Enter.
That looks really good!
That looks amazing. Beautifully finished. We’ll done
I went to a lot of toil:grinning:
Awesome designs. Are you willing to share the stl models? @edivory and @sat_be
And where did you get the up down foil keypad?
I made the keyboard myself. Double adhesive tape+ transparent foil+white adhesive foil printed with laser printer. I have no problem sharing the STL data. If you can do something with it? There are also many small things that you can’t print.
I can in turn share some code for a battery indicator.
Here’s my battery voltage to remaining charge conversion routine. Input is voltage in millivolts per LiPo cell (aka something between 2900 and 4200). Output is float from 0.0 - 1.0 relative remaining charge.
typedef struct _lipo_chart {
float voltage;
float charge;
} lipo_chart;
#define NUM_CHART_ELEMS 11
static lipo_chart chart[NUM_CHART_ELEMS] = {
{4200, 1.0},
{4130, 0.9},
{4060, 0.8},
{3990, 0.7},
{3920, 0.6},
{3850, 0.5},
{3780, 0.4},
{3710, 0.3},
{3640, 0.2},
{3570, 0.1},
{2950, 0.0}
};
float mvToRatio(float mvolts) {
float battery_level;
int i;
// full
if(mvolts > chart[0].voltage) {
return 1.0;
}
// empty
if(mvolts <= chart[NUM_CHART_ELEMS - 1].voltage) {
return 0.0;
}
// Find linear segment
for(i=1; i<NUM_CHART_ELEMS; i++) {
if(mvolts > chart[i].voltage) {
break;
}
}
// Linear interpolation
battery_level = chart[i-1].charge + (mvolts - chart[i-1].voltage) * (chart[i].charge - chart[i-1].charge)/(chart[i].voltage - chart[i-1].voltage);
return battery_level;
}
And drawing two battery icons:
void display_data(float loc_battery, float battery) {
// TX battery indicator
int32_t batt = (int32_t)(16 * loc_battery);
display.drawRect(106, 9, 20, 7, WHITE);
display.drawLine(127, 11, 127, 13, WHITE);
display.fillRect(108, 11, batt, 3, WHITE);
// ESC battery indicator
int32_t esc_batt = (int32_t)(39 * battery);
display.drawLine(110, 19, 122, 19, WHITE);
display.drawRoundRect(106, 21, 21, 43, 1, WHITE);
display.fillRect(108, 23 + (39 - esc_batt), 17, esc_batt, WHITE);
display.drawLine(108, 23+8, 125, 23+8, BLACK);
display.drawLine(108, 23+19, 125, 23+19, BLACK);
display.drawLine(108, 23+30, 125, 23+30, BLACK);
}

I’m building an electric surfboard, using two Trampa VESC 6. I chose the Vescs to use the uart communication for interfacing with an arduino nano with nrf. I’ve already finished the majority of the code and built a “proof of concept” remote (which I discarded since it would be very hard to waterproof). Still, I’m waiting for dual direct drive motors and the batteries, so in the meantime, I’m working on a second version.
It’ll include:
- Oled display for real time telemetry from the two Vescs;
- Wireless charging;
- Hall Sensor trigger;
- Vibration motor for alerts;
- Signal loss failsafe, which immediately breaks the motor to a stop;
- Two stainless waterproof buttons with leds for navigating the many menus;
- NRF24 two-way communication;
- 2000mah lipo battery;
- Wrist strap.
I’ll soon be posting the progress on my build, hopefully this remote will be finished by the end of June.
If you wan’t to avoid wiring the nrf24 to the arduino, you could use this one: https://www.aliexpress.com/item/Keywish-for-Arduino-Nano-V3-0-Micro-USB-Nano-Board-ATmega328P-QFN32-5V-16M-CH340-with/32980796969.html?spm=a2g0s.9042311.0.0.6fc94c4dsXgcHQ
The nrf24 is hard wired to digital pins 9,10,11,12,13, see here: https://github.com/emakefun/emakefun-nano-plus/tree/master/RF-Nano
It is slightly longer than the pro mini, it has the size of the nanov3. You can also order them without pins soldered, the only issue I had was that there was no bootloader, I had to flash it myself (with a spare pro mini).