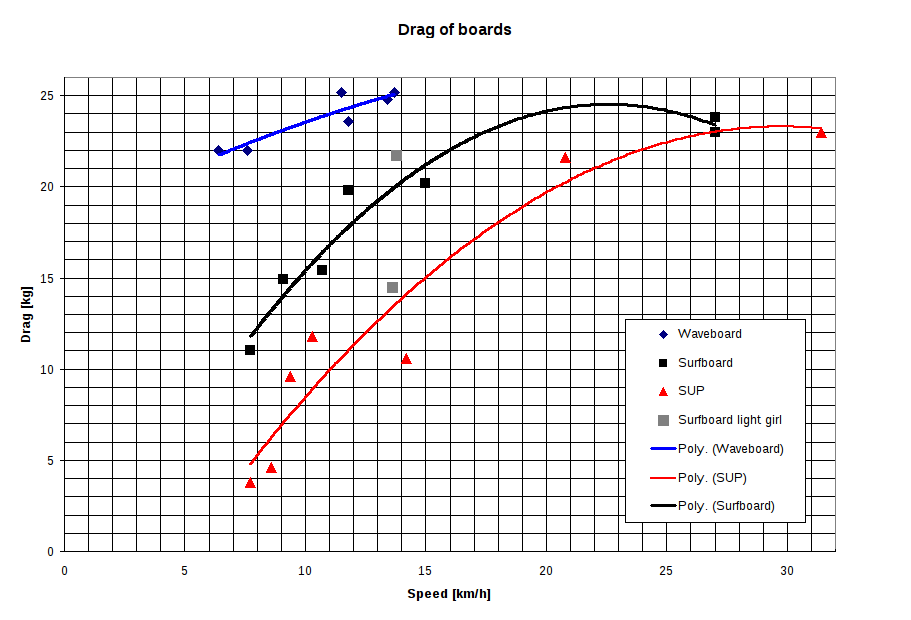
Hi, here are some thoughts on our efoil. We started by measuring the drag of different boards at different speeds in order to better be able to find a low energy demanding configuration.
We used an mechanical and electrical scale and also measured the time between two points giving the speed. The operator for the pulling-cable speed entered a constant speed over the entire measurement track.
The wave board was a Slingshot wave board for kite-boarding (about 40l volume). The second board was an old surfboard. The SUP was an inflatable SUP, which is shown in the video. video of the drag measurement.
Wing Design
Based on the measured drag we saw, that it is beneficial to lift as quickly as possible. Furthermore I was thinking on the main purpose of the efoil. I love kitesurfing in waves. Therefore I would like to optimize the foil for riding waves.Here is an example without motor - Video
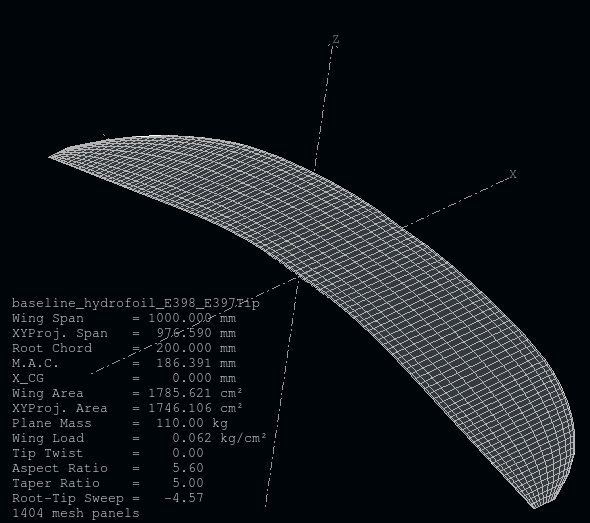
I studied Aerodynamics, so I designed a wing shape using XFLR5. I was looking for high lift airfoils for the hydrofoils Reynolds numbers. After some tries I decided to apply the Eppler E398 for the root wing part and the E397 for the tip. These airfoils are thick, which gives a good structural stability. I hope to use thinner airfoils in the future, but we did not want to risk breaking a wing on the first prototype. The high structural demand results from the high span of 1meter! This is huge, but there is only one recipe for low induced drag at low speeds → high wing span and aspect ratio. With a root chord of 20cm and a span of 100cm the resulting AR (aspect ratio) is 5. At these low ARs the profile drag is little compared to the induced drag, which is the reason why I did not dig into further airfoil optimization or search for better suited airfoils (for now). Another goal was a high wing area in order to generate enough lift at low speeds. Hence the wing area is triple the area of racing kite foils. (about 1800cm²)
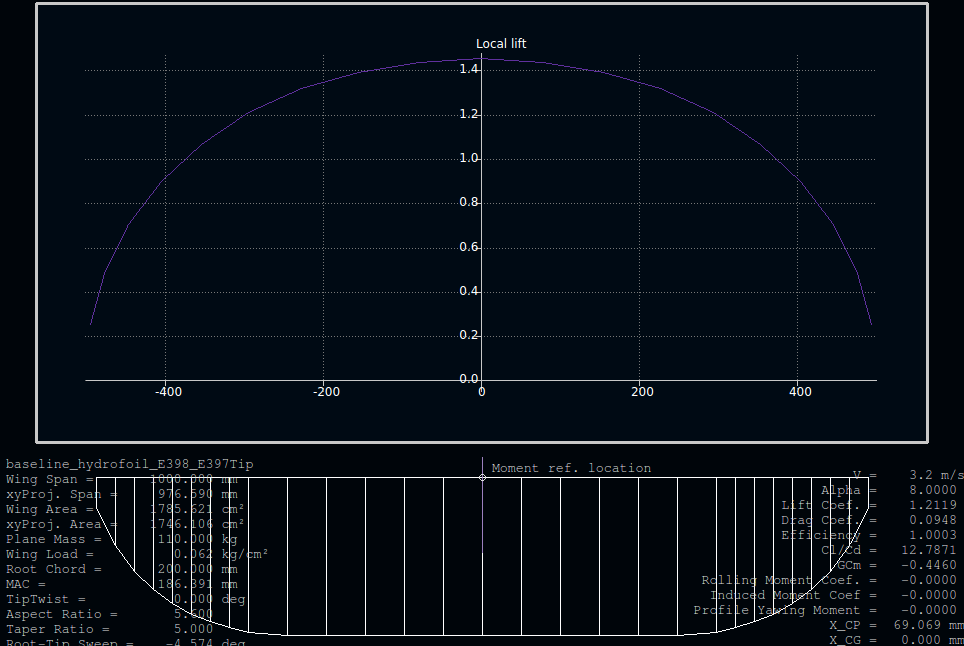
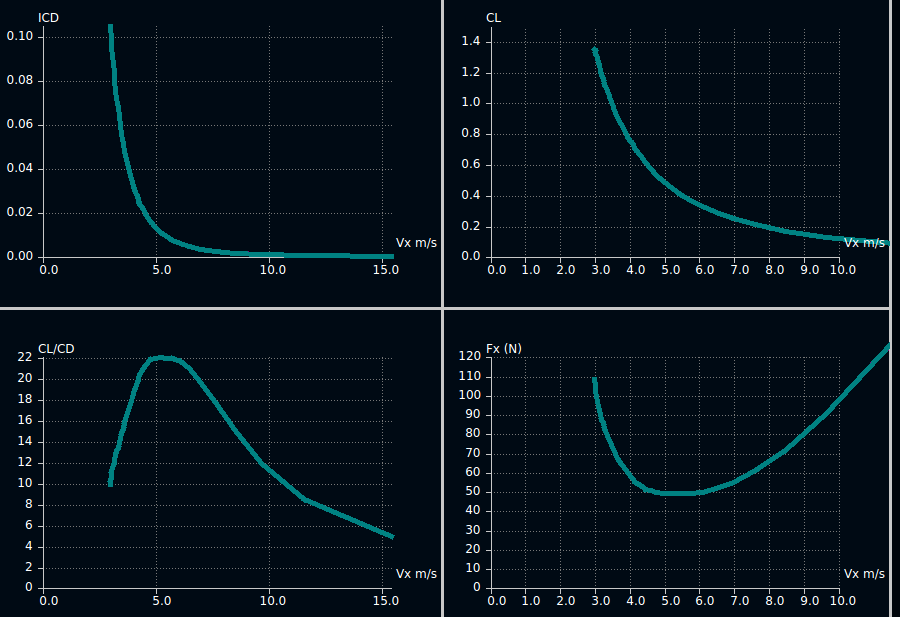
The calculation implies that lifting off will be possible at 3m/s (11km/h / 6kt). On my last sailing trip I realized, that it will be possible to foil without motor behind a 30ft sailing boat, which runs usually at 6-7kts.
The polar implies that it might be beneficial to lift off at 15km/h depending on the characteristics of the board in order to be able to use an motor as small as possible.
The wing war 3D printed. The print included channels for carbon-UD-spar caps. The current status looks like this:
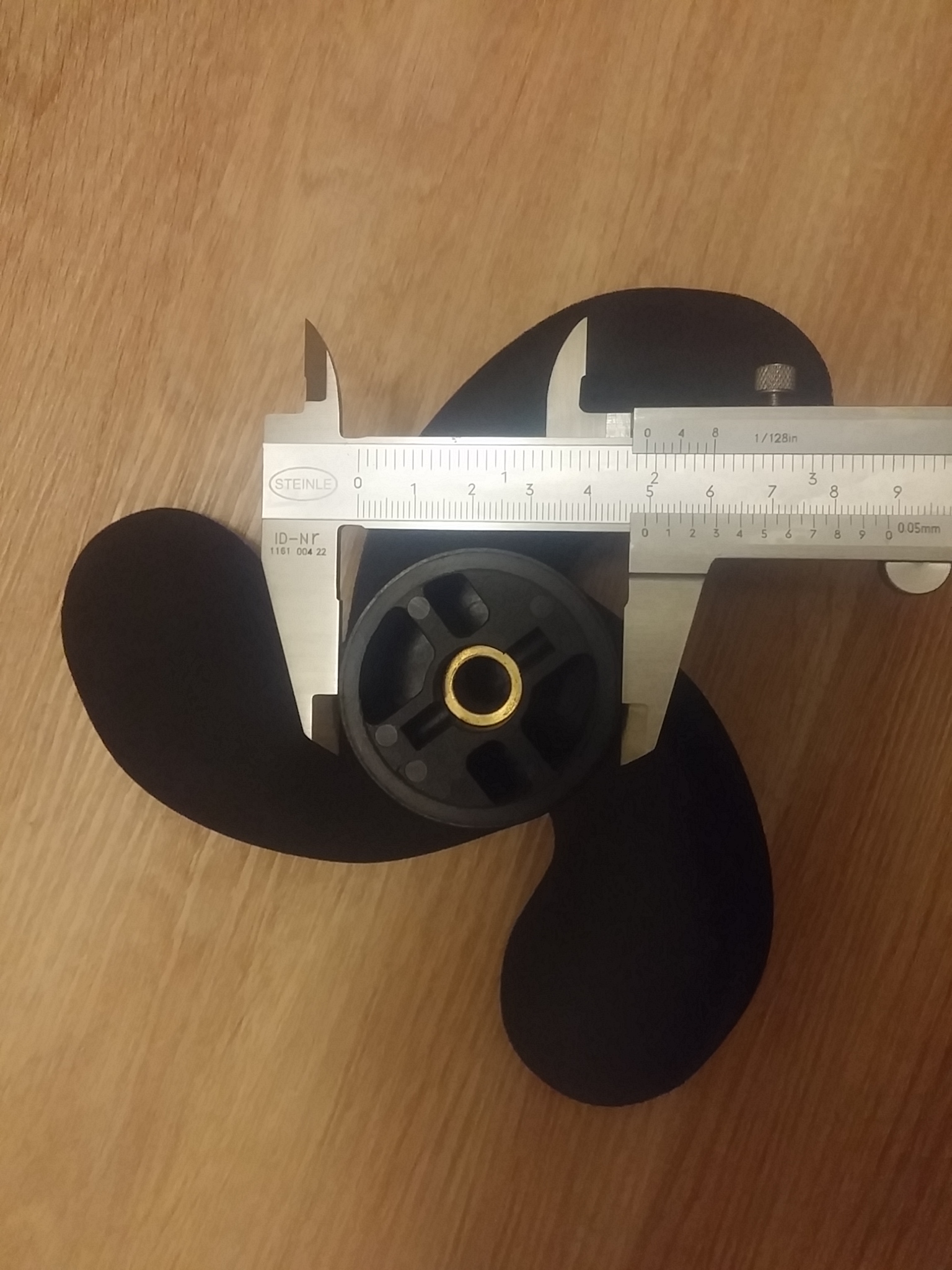
Propeller
At low speeds size matters. Hence the propeller should have a large diameter. On the downside the duct must also be larger.
I was looking for the largest propellers for RC Boats and ordered the MS-Propeller Serie 146 3Bl-130-R-M5 for 58€.
The price of 40€ fits to my goal of keeping the costs down.
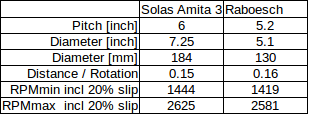
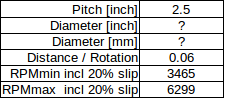
Based on these props we get the following motor requirements. RPMmin for 11km/h and RPMmax for 20km/h.
As we see the RPM max for the Raboesch propeller is slightly higher than RPMallowed (2581>2150) based on the propeller specification. It might be possible, that 20km/h would be a little to much. On the other hand the calculation is done with 20% slip, which might be a little to high… maybe RPM would be lower.
Right now I intend to use the Solas Amita3. I could not find suitable foldable props. Please reply if you know any!!! The only ones I found were for yachts and very expensive.
Many hours of searching for suitable motors ended up in:
Outrunner (cooling problem)
In-Runner and low pitch prop
In-Runner and gearbox
Outrunner
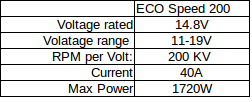
One outrunner which has a diameter of 50mm (close to hub-diameter of Solas prop) matches the demanded RPMs is the Graupner ECO Speed 200.
The max power from the datasheet of 1720W should be enough to lift the board out of the water. Afterwards we get about 600W (14.8V x 40A). This should be sufficient for foiling without the board being in the water.
The upside is the price of 70€ and no costs for a gearbox! The downside is the cooling …there might be multiple approaches to address this problem:
let it run directly in water, therefore one could fill all the gaps like shown in one picture from Robodrive:
Does anybody have experience in this?
mount it in a tube, where the air can blow through the engine and back close to the outer walls for heat transfer. Here tiny blades could be mounted on the rotating shaft in order to increase flow speed and thus heat transfer. Did anybody try it this way?
use oil for heat transfer inside the tube
The rotating shaft can be on both sides, which makes several designs possibile.
** conventional in-runner**
Here high power and low KV (rpm per Volt) can be reached by the kind of motor @pacificmeister used. The longest one in this series is 114mm and gives 350KV. BL Motor SSS 56114/350KV / 10Y.
Maybe by using a prob with a smaller pitch than the ones above would work, like pitch 2.5"
The motors maximum Ampere is 93A. At 11km/h we would get 3500RPM, which would match 10Volts. → Power: 930W which should be enough when the board and propeller are selected having high efficiency in mind (?)
Going for this approach would make me start searching for another propeller. Or design my own using Java-Prop from Martin Hepperle.
Great work and information on board drag and selection!
I wonder how a properly integrated foil would effect this data? If the lift provided by the foil seamlessly took over the lift provided by the board as speed increases, a somewhat smaller board might become more practical/desirable.
It’d be great to repeat your board experiment with foils attached to see the effect the wing has on drag total drag at lower speeds.
Also, your method of testing for drag might be a good way to optimize wing incidence relative to the board for “lowest power” take off…that is keep tweaking wing incidence until the minimum total drag for take off is achieved.
exactly. We intent to start with a big board and then cut off pieces and repeat the measurements. I am not sure if one should try to lift off at low speed or increase to higher speeds and then lift off. I think there is no rule for this, because it depends on the wing (area and aspect ratio) and the board drag (length). I also like the idea of having two main wings. One large one, which lifts off at very low speeds mounted close underneath the board and then a smaller one. The goal would be to find a solution, which allows wave surfing without using the motor. Therefore a second foil or a second motor which gets out of the water would do the job. The main motor would then have a folding propeller, low motor diameter and thus low drag… still a long way to go…
Right now our gear (wing, board, engine) is not ready, so we can not measure this, yet. Maybe someone of you guys lives near a wake board track, which uses the Wakeboard “System 2.0” … this was perfect for such measurements.
Another way for lift optimisation could be to think about another little wing at 1/3 of the mast, with more angle than the main wing : in the water only at low speed, something like the flaps on the airplanes.
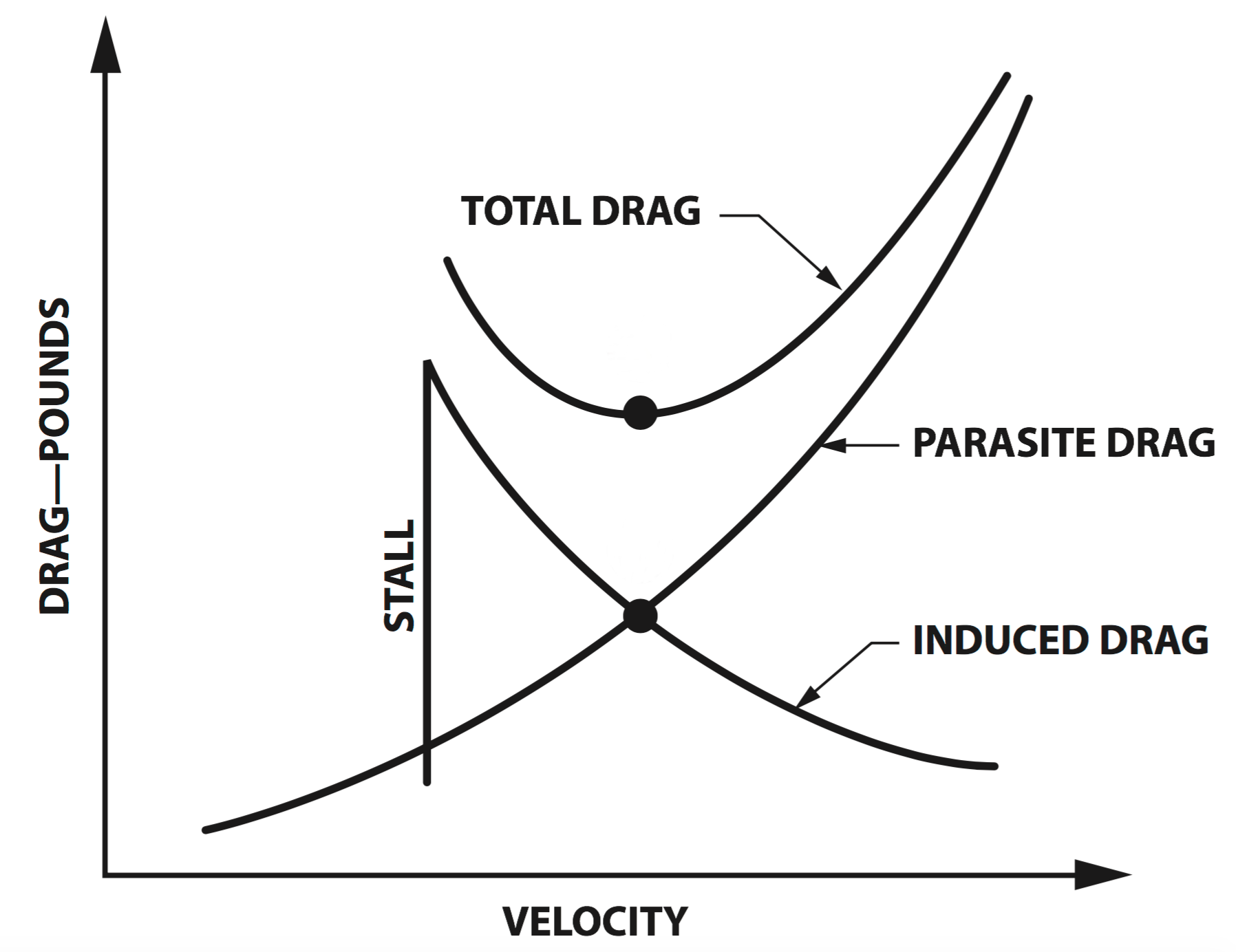
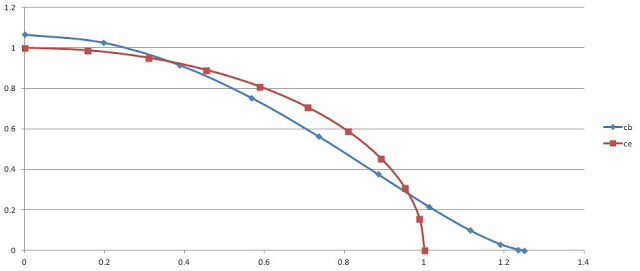
… there should be an optimum for multiple wing sizes. The main drag we are fighting at lift off speed is induced drag. Here is the are the drag shares versus speed:
Lift Coefficient ~ Angle of Attack (as long as we do not stall, this also depends on the airfoil selection)
also:
Induced drag ~ 1 / aspect ratio → we need to have a high aspect ratio (slender wing)
I think one little wing operating at high Angle of Attack (–> high lift coefficient → high induced drag) might have a drag penalty. All wings should have similar lift coefficients. We also need aspect ratio, so the second wing for helping lifting up the foil should not be too small. Calculation/Optimization for this can be done using XFLR5
… I am looking forward to posts of someone, who tried this…
Hi @flyingchris, Thanks for sharing your knowledge with us! Here is a link you may be interested in about a hydrofoil boat with a large main wing that retracts and allows a smaller wing to take over. The basic idea is the same as what you’re talking about to get the boat out of the water with less power.
Also, here’s something I learned recently about an improvement to the elliptical lift distribution where it should actually be a bell curve to reduce induced drag. This was discovered by a NASA scientist. I hope you find it interesting. I’m curious what you think because of your experience in aerodynamics.
Hey Chris, don`t take all the conclusions from aerodynamics into hydrodynamics. Pay attention that we are operating with surf hydrofoils at Reynolds Numbers of about1-400000…and not at Reynolds numbers above 1 million most profiles are made for:wink: Even most of the big companies kitefoil designers walk in the dark at this point:sweat_smile:
On the other side even a flat board does elevate at a certains speed. But if you want the best in regards of performance, yes a good front wing is necessary…
And for the prop design, always keep in mind… cavitation starts around rel. velocity of 14m/s…
The motors maximum Ampere is 93A. At 11km/h we would get 3500RPM, which would match 10Volts. --> Power: 930W which should be enough when the board and propeller are selected having high efficiency in mind (?)
There are two problems: 350KV means no load RPM, so at 10V you might get 3500RPM only without prop. The real RPM might be up to 1/3 lower (assuming 10V are in the voltage range of the motor, it could also be that a 130V rated motor doesn’t even turn on at 10V), and the second: you can’t calculate like, 10V * max amp => maximum power. The motor draws up to 93A at a certain RPM, load and voltage. There is a curve or matrix for every motor for those parameters in dependence of each other, similar to the graph you started the topic.
@Gliderpilot thx, very interesting “flying samurai” video. Supports my hope that our small motor will do the job.
About the bell shaped lift distribution:
The big disadvantage of that is the larger span needed compared to the elliptical lift distribution.
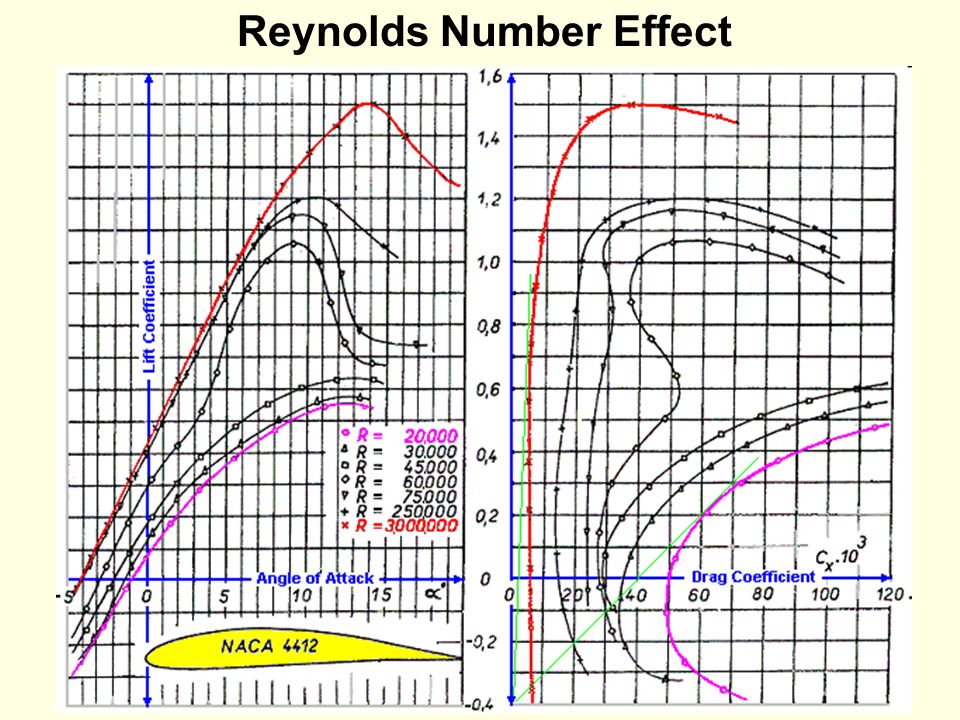
Second issue is that the lift near the tips is reduced. It is usually better to reduce chord here, rather than applying more twist. Here we have already the problem, that we get lower Reynolds numbers (Re=Speed * chord / kin-viscosity) near the tip, which decrease airfoil performance (less max lift and more drag). If we lower the chord here further, we get even lower Reynolds numbers, and thus less performance. I think the bell shaped lift distribution might be feasible for some purposes, but maybe not when we deal with small Reynolds numbers.
Here is a picture showing the Re-Effect (drastic example). At small Re-Numbers there is a larger performance drop than for higher Re-Numbers when chord (~Re) is reduced.
Here is an update on the fuselage. We probably oversized its stability a bit. The initial idea was that we need a wide connection, because of the larger wing span. Furthermore we have two mast positions (3 holes for 2 screws)
Did you hear about a “Gurney Flap”, they are used by race cars to increase the pressure of the spoilers. Airbus now uses them to have an adaptive wing/ lift control during the flight and takeoff (usually you use the “real” flaps for slowing down while/after landing by destroying the laminar flow).
It’s just a tiny angle at the end of your wing profile. Gurney Flap
Swiveled the engine and controller housing. Gap will be very small. Inner diameter of tube was orderes to be 51mm. Now it is 50.5mm. The outer diameter of the outrunner is 49.5mm… we will see if it fits when everything is being assembled.
Decided to put the controller in the tube, hence the tube got very long. 10cm for the engine 15cm for the controller and caps (planned YGE caps 5, due to long cable)
It looks like we’ve both started hydrofoil projects with the same goals in mind. My goal is to power out and catch storm waves as I imagine powering across a flat lake will get boring fast. I find those sit down jet ski’s boring after a couple minutes and certainly doesn’t feel like a “sport” I’m also designing a similar project and have done several test with varying degrees of success and will have my build up here soon. One comment I would make is I don’t think you need to get crazy worrying about board drag. My only goal there is to have the board as small, light and stiff as possible!
Here is the current design. There are two tubes, one for the controller (and the cap5 for compensating the inductivity of the long cables) and one for the engine. The one for the controller will be shorted later soon as I know how much length is really needed. I hope that this controller fits inside: