I’m having some problems with me set up and wondering if anyone can be so kind as to help me
MY SETUP:
ESC: Flipsky FSESC 75100
Motor: Flipsky 65121
Battery: 2x 6S LiPo in series (12S, 44.4V nominal)
Remote: Flipsky VX3
Application: Efoil build
THE PROBLEM:
The motor does not spin when the trigger is pulled. No current spike is visible in VESC Tool when throttle is applied, suggesting the ESC is not outputting power to the motor.
WHAT I HAVE TRIED:
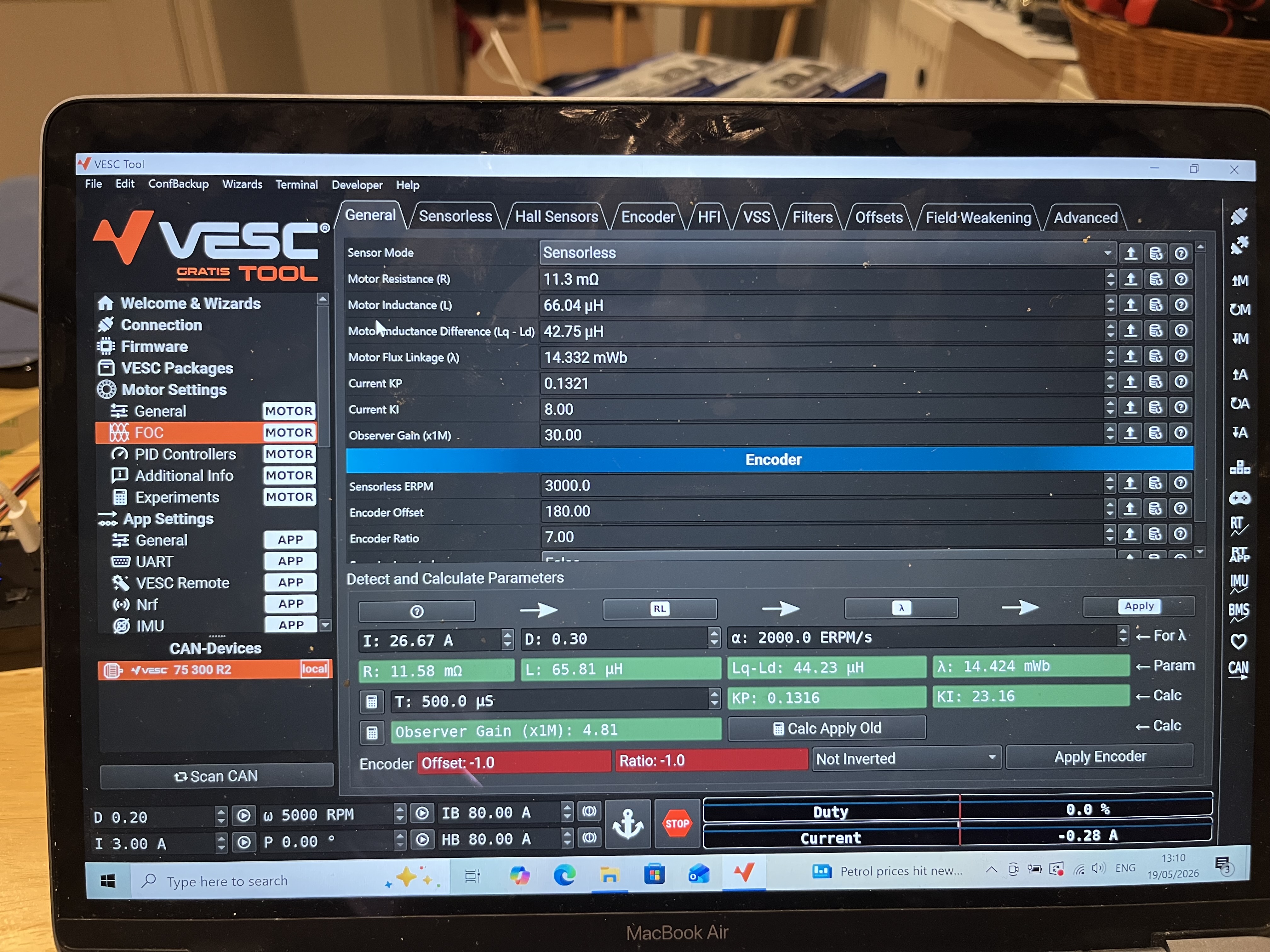
Full FOC motor detection completed successfully
Motor parameters detected: R=4.4mΩ, L=67µH, Flux Linkage=14.4mWb
Confirmed Sensor Mode = Sensorless
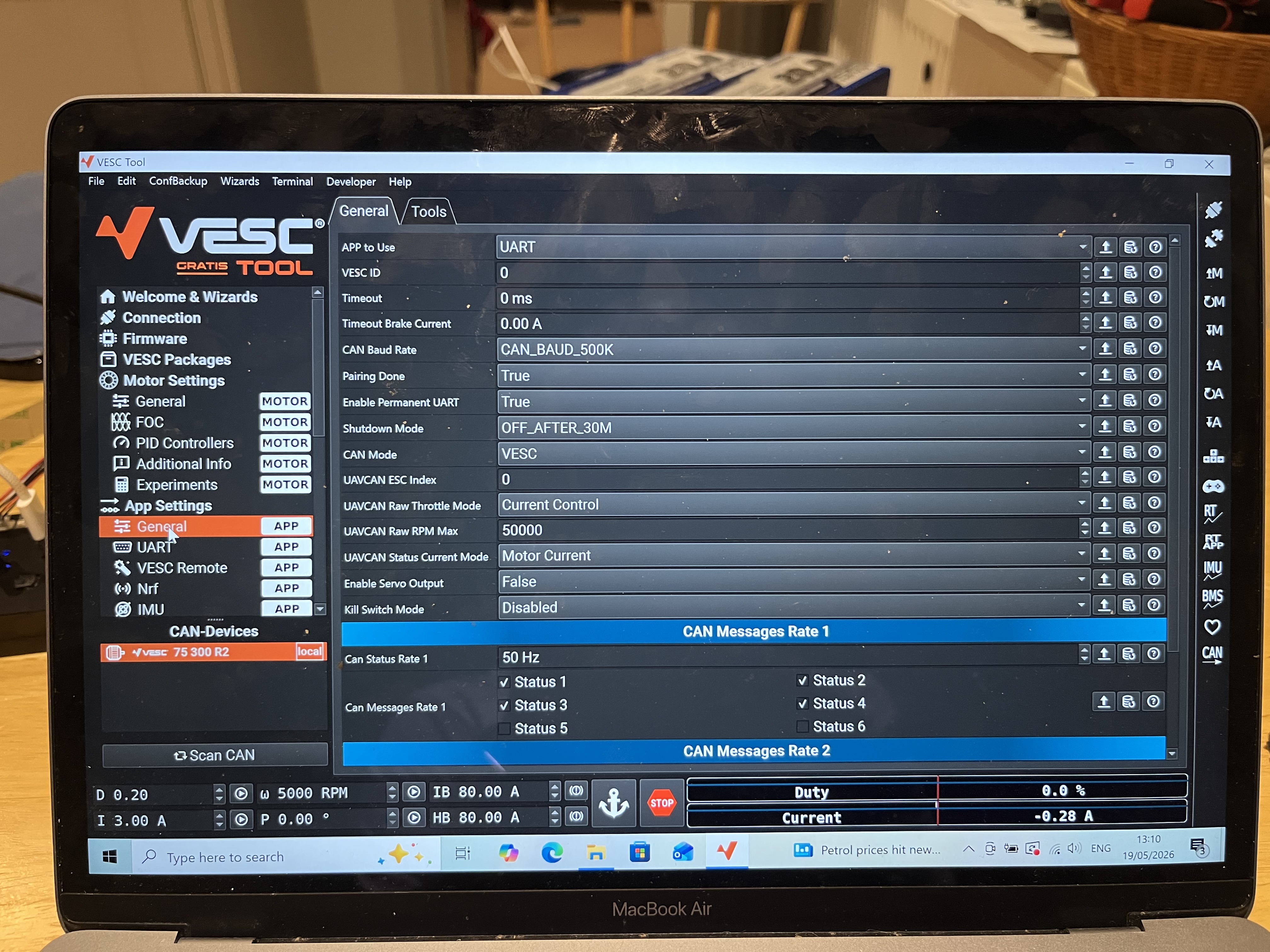
Confirmed App to Use = UART
VX3 remote paired and showing live telemetry (battery and ESC temp visible on remote screen)
Throttle signal confirmed at 96.9% in VESC Tool when trigger pulled
Phase wires resoldered
No fault codes registered (confirmed via terminal faults command)
foc_openloop commands accepted by ESC but motor does not respond
Current does not spike when any motor command is sent
conf_store run multiple times but settings do not appear to save properly
MY CONCERN:
The ESC may have suffered damage to the output stage (MOSFETs) during initial testing when the motor was overheating due to a bad phase wire connection. The ESC accepts all commands and connects fine but produces no output to the motor.
Could you please tell me what my best steps going forward are and if there is anything I can do.
if someone is willing to come to Oxford and get on the computer and sort this out will happily pay for their time.
I am based in the UK (Oxford). Please let me know what information or evidence you need from me.
Are you sure the UART is connected correctly?
I am asking because the TX and RX cables on the connectors sometimes need to be switched. I have the VX3 and the 75100 from Makerspace. Makerspace has inverted positions of TX and RX pins compared to Flipsky. I was also wondering why the motor does not spin up.
EDIT: sorry just reading that you are receiving the throttle signal in the VESC. In that case I have no idea. But I used Claude to resolve all my issues with the VESC by sending screenshots from the configs and checking the wires.
have tired all and as any wise man does go straight to AI so me and claud ( mainly claud ) have released the hardware coming up on VESC tools is a 75_300_R2 but the ESC I have is the FSESC 75100. and Current never moves from -0.01A including any command. so ESC has failed.
if anyone think is might have been a different reason I’m fully open to ideas and trying to get things to work.
Hi, please make sure to follow the following video when setting up the vesc
You can lower the currents a bit more, check the Flipsky website for the current requirements for the 65121 and follow Ludwig’s logic.
it started and it was accepting everything and commands where working but now I’m getting nothing it jitters when I pull the trigger but no signs of it actually spinning. now its not accepting commands
did you try put the remote on m(edium) or H(igh)?
i have VX5 remote and if i put gear in 1 or 2 nothing happens
i must atleast put it on gear 4 or higher to have anny movement in propellor
The settings seem to be fine. The only odd values you should change, but will not help you to resolve your problem:
App Settings → General: Timeout should be at least 1000. I have 500. This is a safety setting and it stops your motor when the controller looses connection.
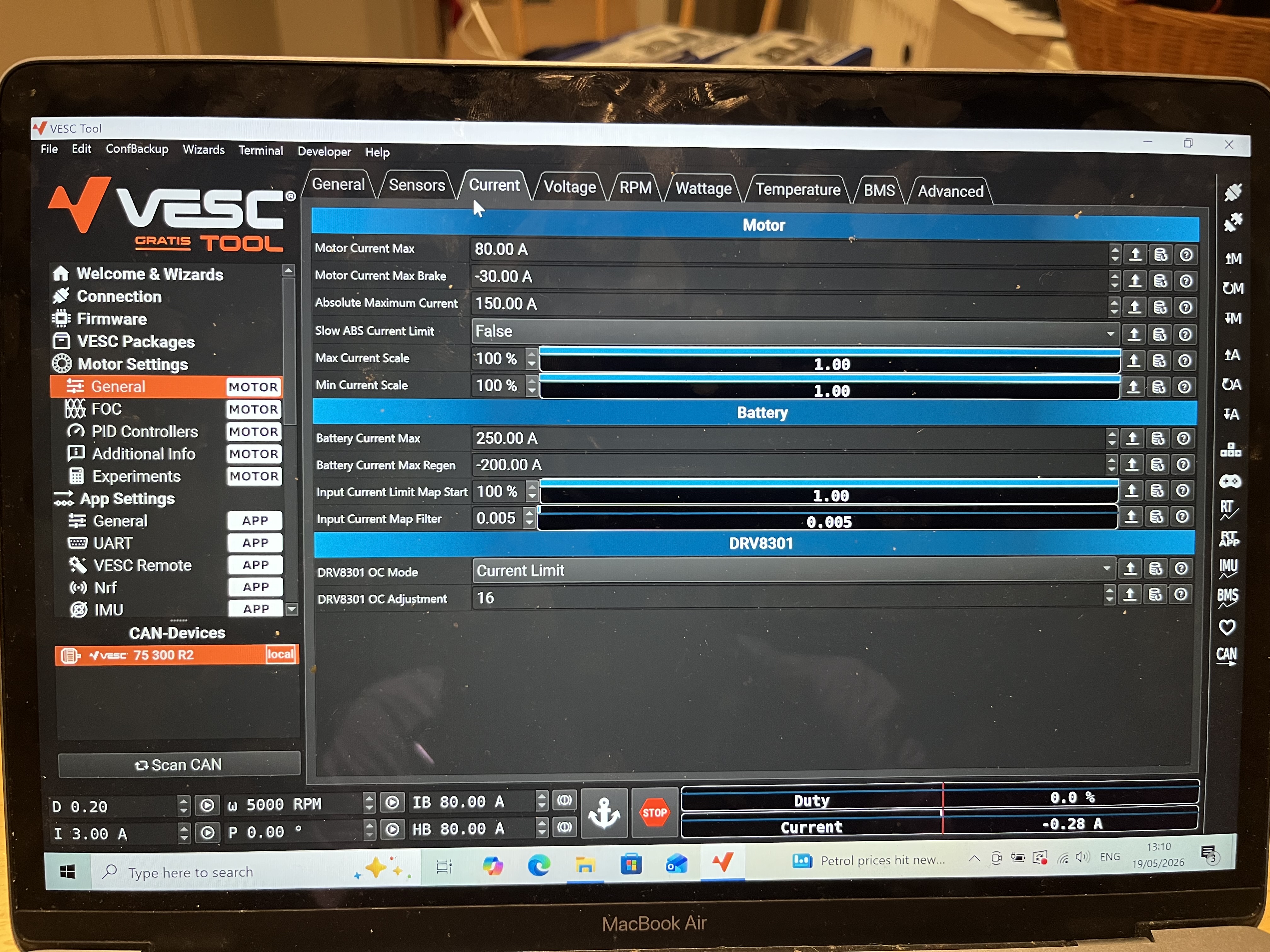
Motor Settings → General → Current: Motor Current Max to low, Battery Max Current and Battery Max Regen Current are way to high. Your LiPo might be able to deliver it, but you really do not need it and you probably will never hit that value.
For the 75100 you can set Motor Current Max between 100 and 120A (I have it at 120A with good cooling and it also depends on your motor Kv) and Absolute Maximum Current at 160A. The Battery Max Current you can set between 60A and 90A to be able to reach the motor current (really depends on how much your battery can safely deliver → I do not know your battery, so might have to limit it lower + your needs might be lower → bigger board for example). Battery Current Max Regen is not relevant for us, but it should not be 0 because it could cause other issues. In the setup video he says between 20% and 50% of Battery Current Max. I have mine way lower than 20% (6A) with not problems.
I would really advise you, if not done yet, to watch the video @DutchFoiler posted above on how to setup a vesc.
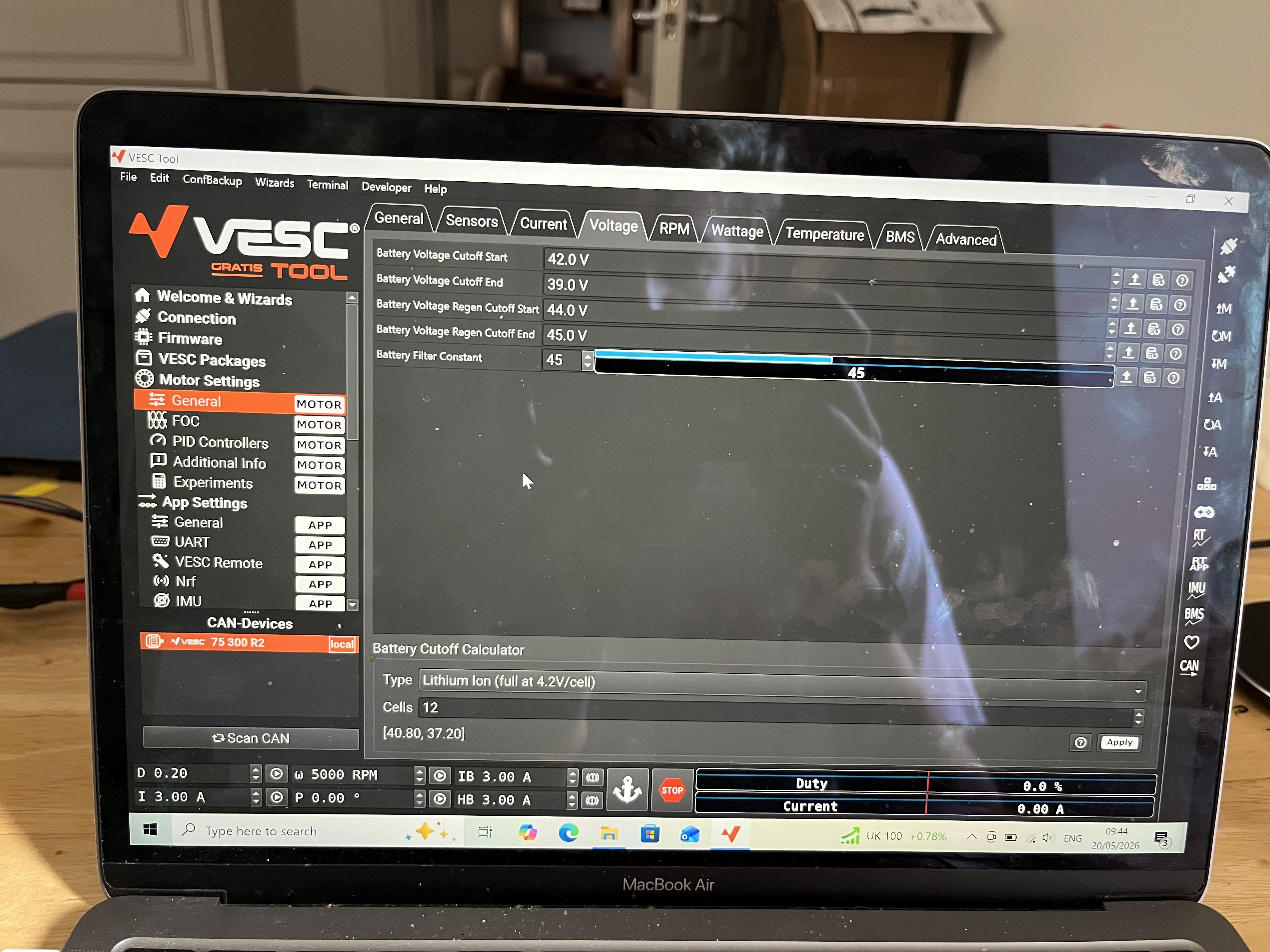
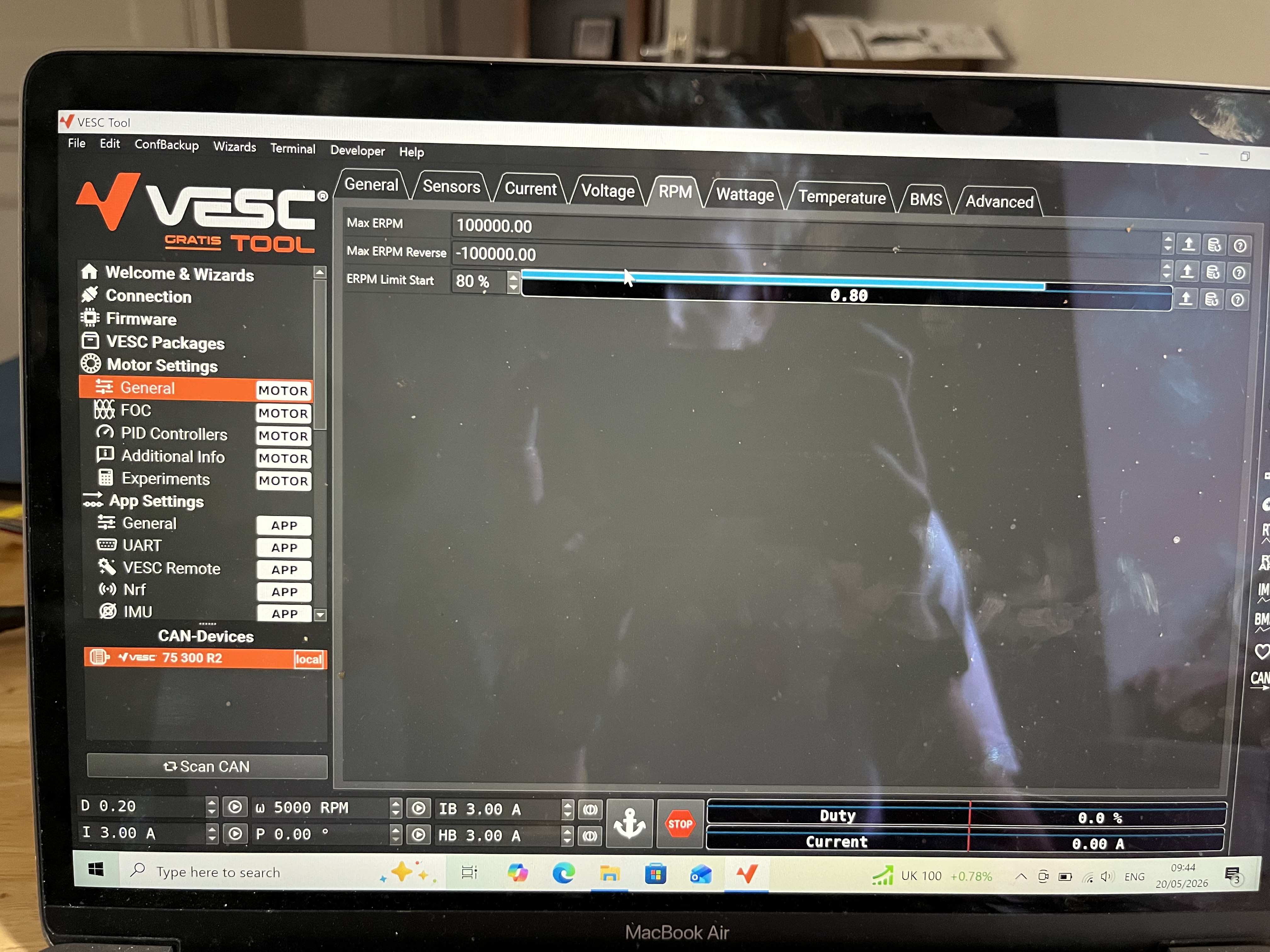
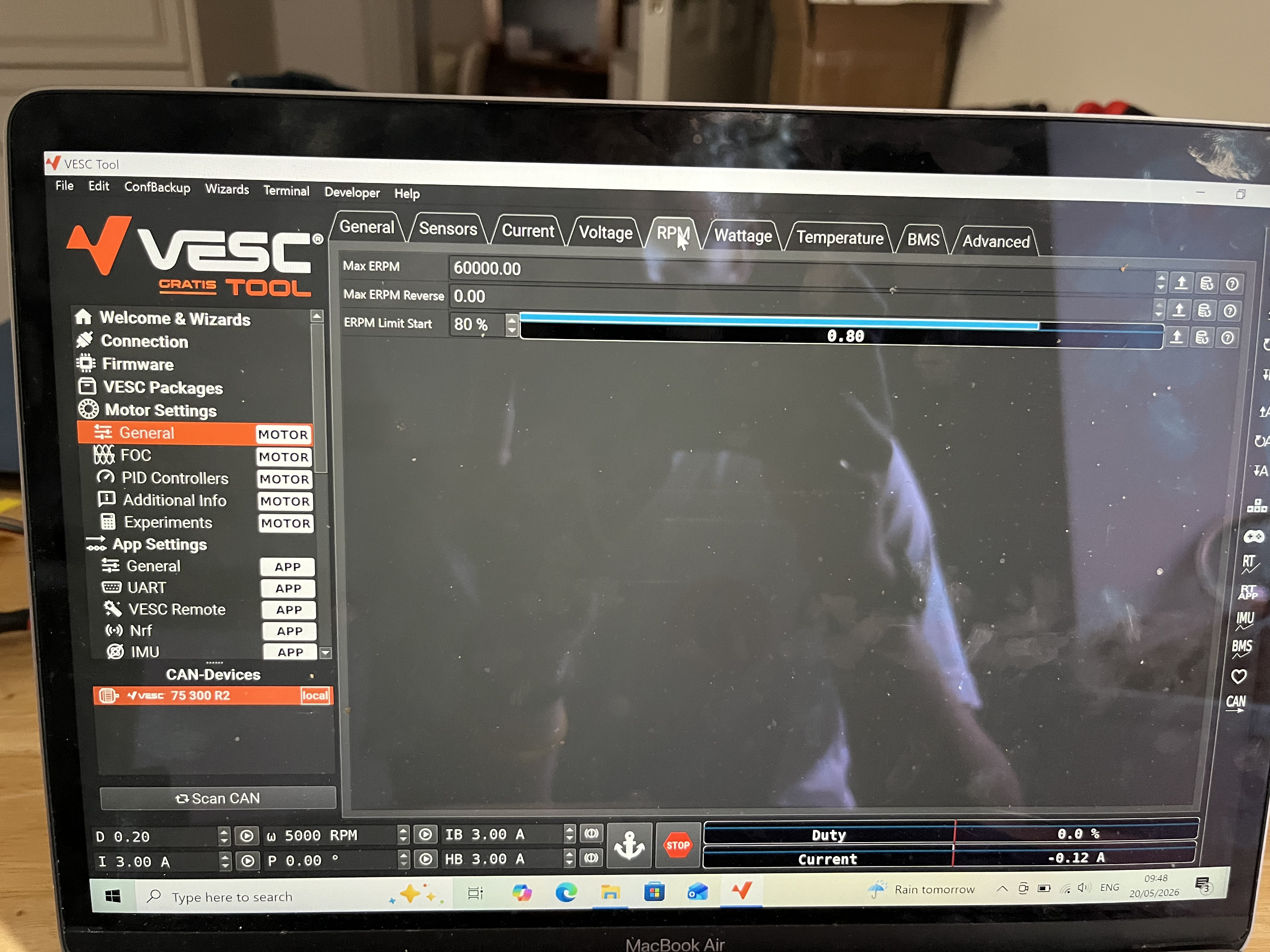
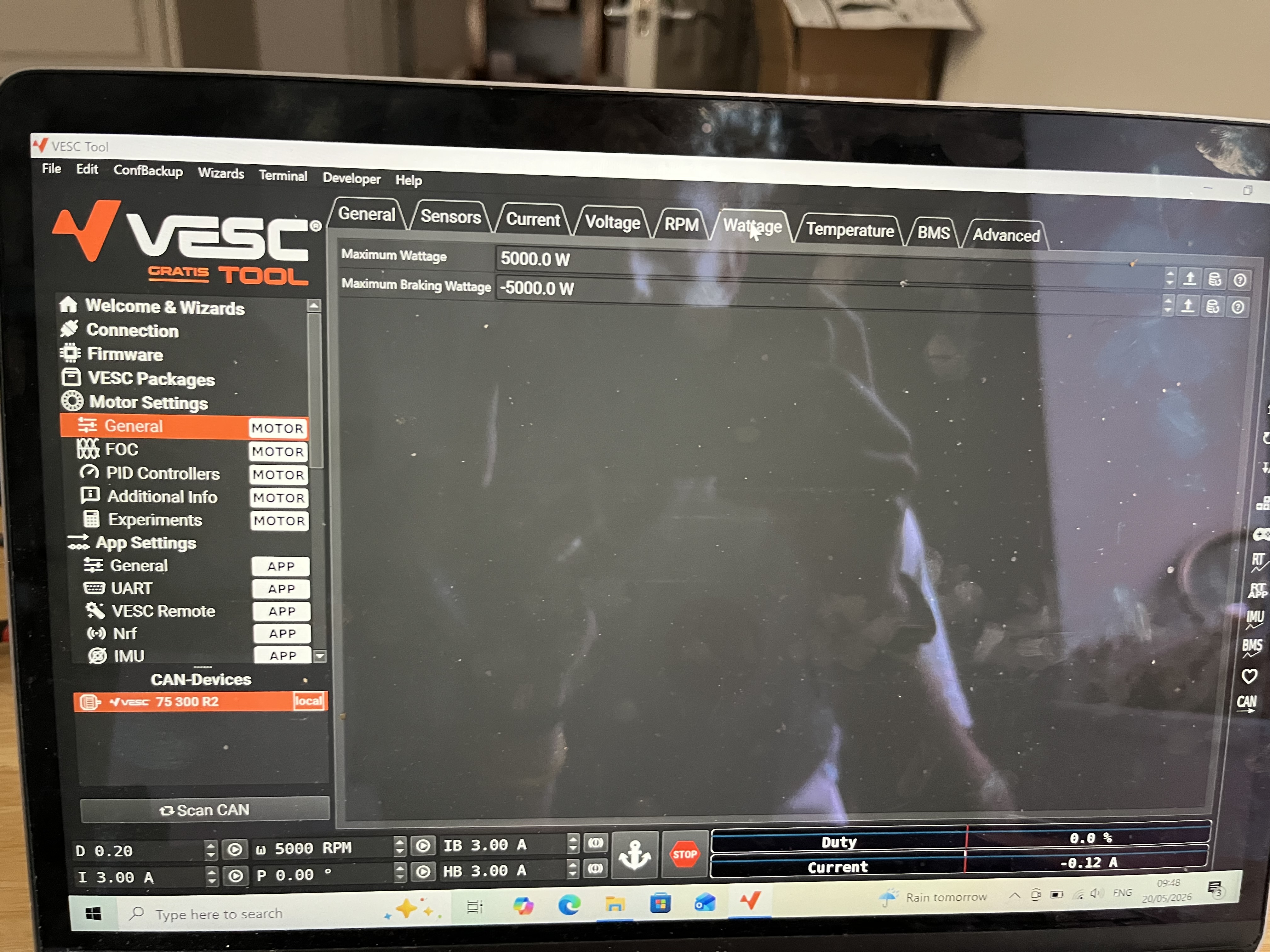
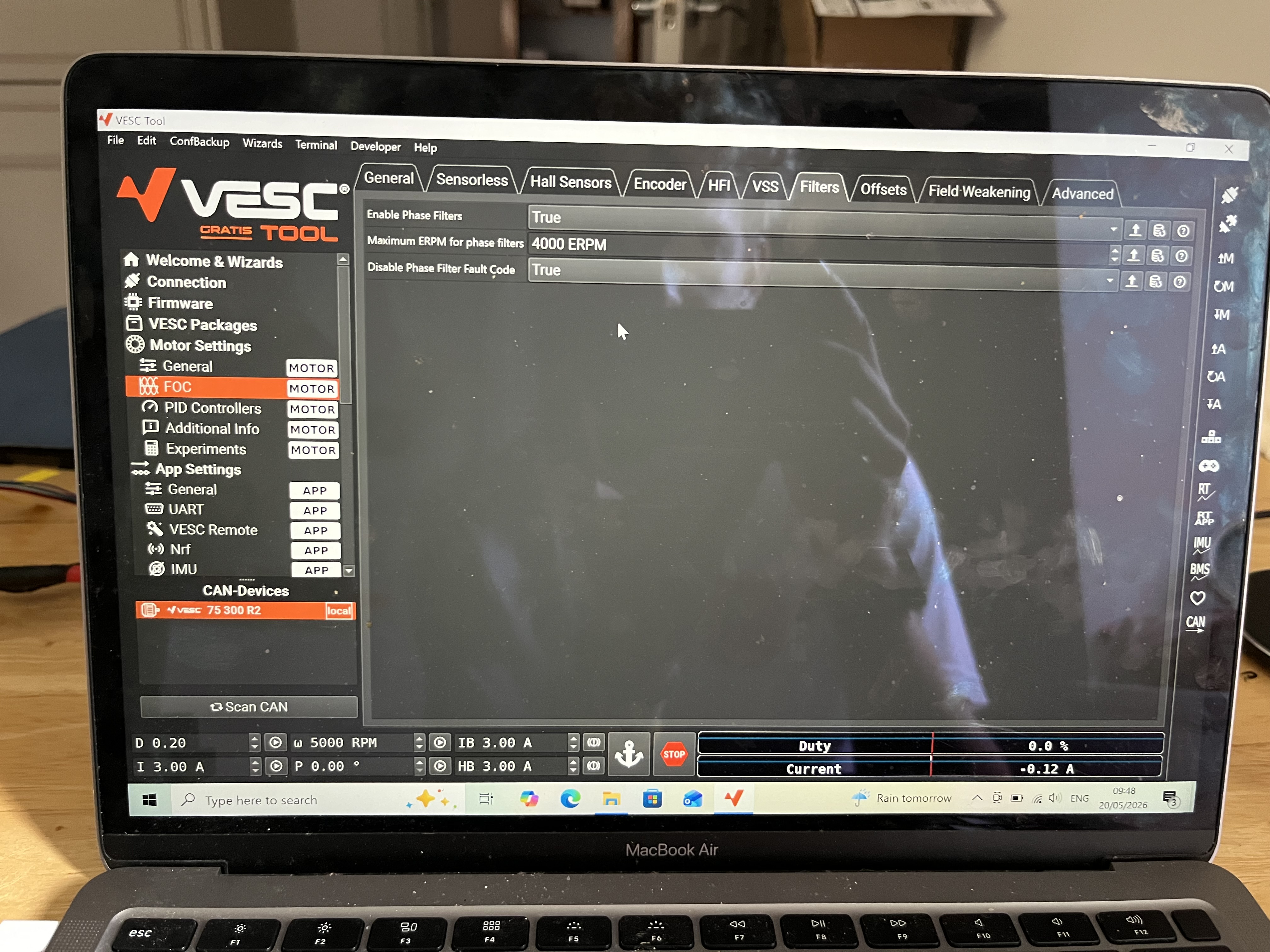
Could you also send the rest of the settings under Motor Settings → General → Voltage, RPM, Wattage. And Motor Settings → FOC → Filters