@SurfingElectronics quick update on my progress: It takes longer than expected, but I knew it will be alot to do
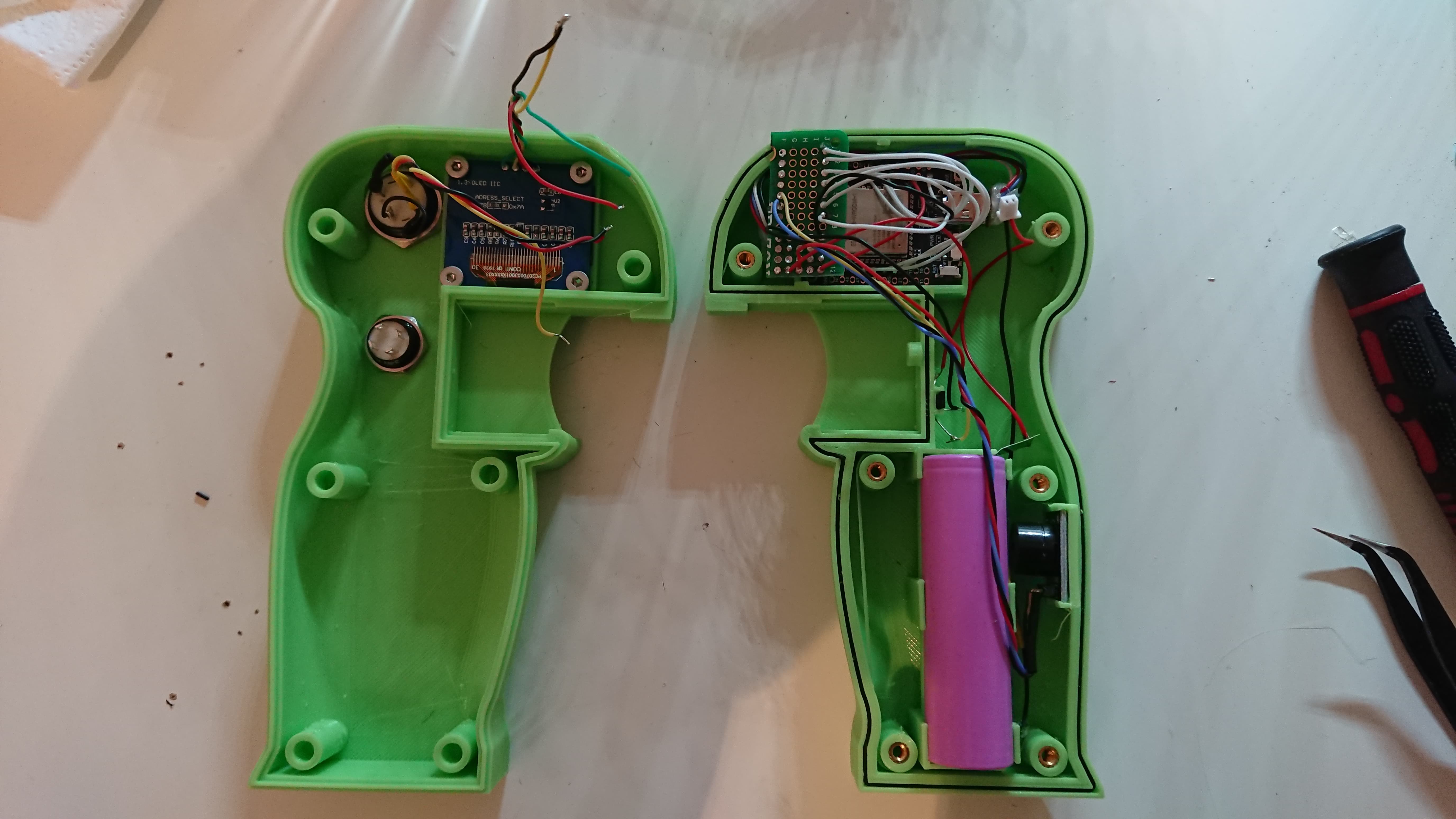
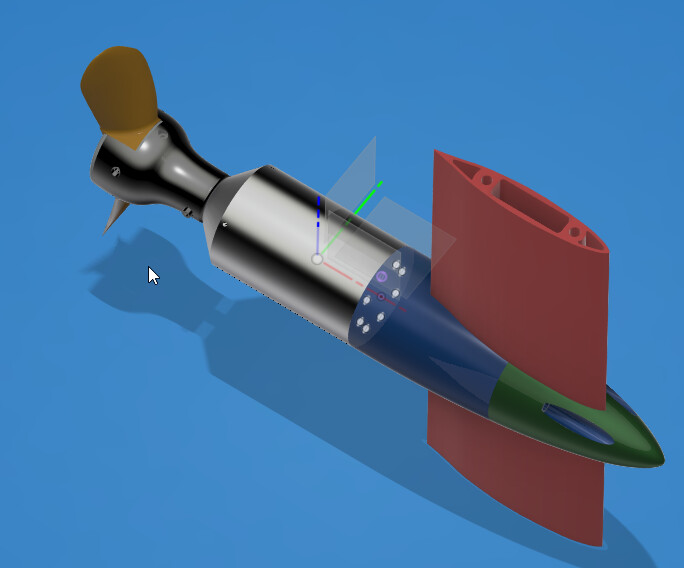
3D printed case for the remote is finished and I start implementing the single hardware components. Remote software part is also “done” as it works in my bathtube xD BTW your propeller also did not break yet, so thanks again for the stl.
So far the motor seems strong (I only tested up to 20A as water flow was too massive in bathroom)
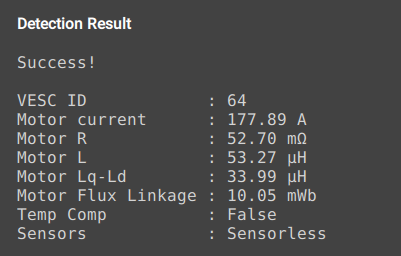
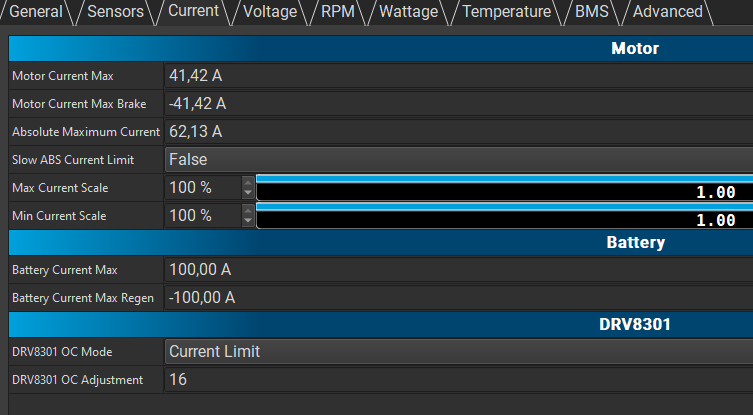
In VESC Tool it recognized the motor with around 41A max, is that the same values you got from scanning?
Here are some photos. Will put it together and see if it really works out of the box. Had some problems fitting the OLED, which apparently also got now a whole lot bad pixels, but anyway I just build this 1st thing and will see if all fits, especially water resistance.
Here is my motor result in VESC Tool.
It is interesing because on official website they claim motor can handle 30A nominal and 70A in burst.
And their thrust table states:
It’s odd you getting such different results to me. I did sent all the screenshots, step by step to flipsky and they replied back with some suggested changes. See earlier in the history chain. Could you post screenshots all from beginning to end all the steps you followed?
These are 1mm thick round cord. I just put them in there with my nails xD. I also got 2mm wide that I used for the OLED. I did not glue them together for the case, my hope is that water will not penetrate exactly at this little spot.
Things to check now: waterproofness, new OLED, and maybe a different hall sensor.
The best thing is, that I can still update my firmware through USB-C AND charge the internal battery