I’m currently designing an active height/pitch/roll control system for a hydrofoil. It all works in simulations, but now I need something real for tests. Hardware target is Pixhawk currently.
I want to build a smaller scale model to test all algorithms first before going to bigger boats (final target is a flying sailing boat, like AC75, but smaller and smarter)
Does anyone has experience or an already build prototype of a simple hydrofoil with active control surfaces - e.g. flaps and/or movable stabilizer and e-motor? I basically just need a hardware to which I can add my control servos and install necessary sensors/controller/battery on top. Size doesn’t really matter.
Or can I buy something commercial? I was thinking of taking the wing legs from Moth/Waszp - but this requires additional work to install it to suitable platform. Any other Ideas? 3D print?
Thank you for help. I’m surely will present a design once it works in reality.
hey, I just re-read your post and saw that you already have the control system!
I am curious how you developed the plant model of the system without incorporating real designs. What did you put in for things like length parameters? How would the system know the output roll rate for example with a given input?
The plant model is just an estimation, based on simple physical equations. Off course it needs to be validated against real boat and it’s parameters adjusted. That’s why I need some real hardware now.
That makes sense, all in the gain tuning once you get something put together.
Your best bet is probably to take an already working hydrofoil boat and swap the control algorithm for yours. Like I mentioned in the other post, the mechanics for the control surfaces are really not present on most hydrofoils and would be a lot of work to add. Unfortunately the commercially available ones are all mega $$$!
If you are interested, I would willing to try and insert it into my pixhawk code and test, but not sure how usable the results will be. The gains and the frequency response of the controller would be wrong for the larger model and unlikely directly scalable.
Also, I am curious, how many states and inputs are you considering for the 3 axis control?
I had a similar plan to you, but unfortunately I haven’t had the time to get too far. I spent about a year or two getting the basic (non-stabilised) efoil going, which turns out to be no small task!
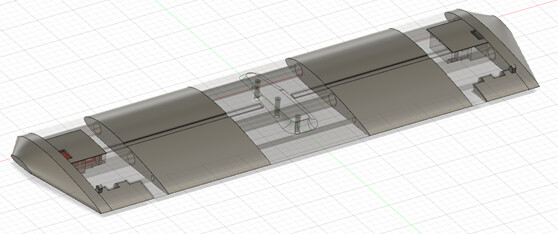
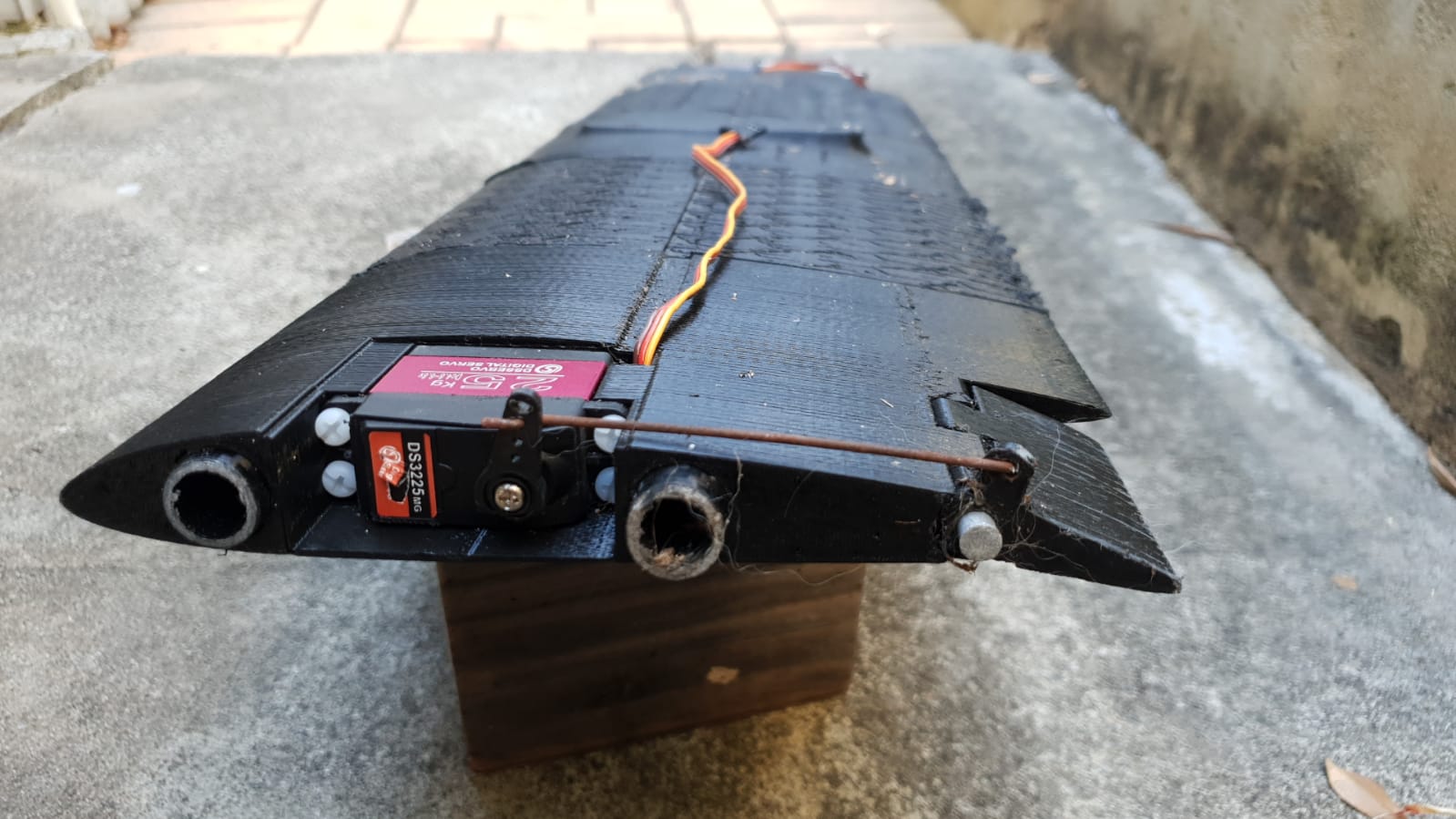
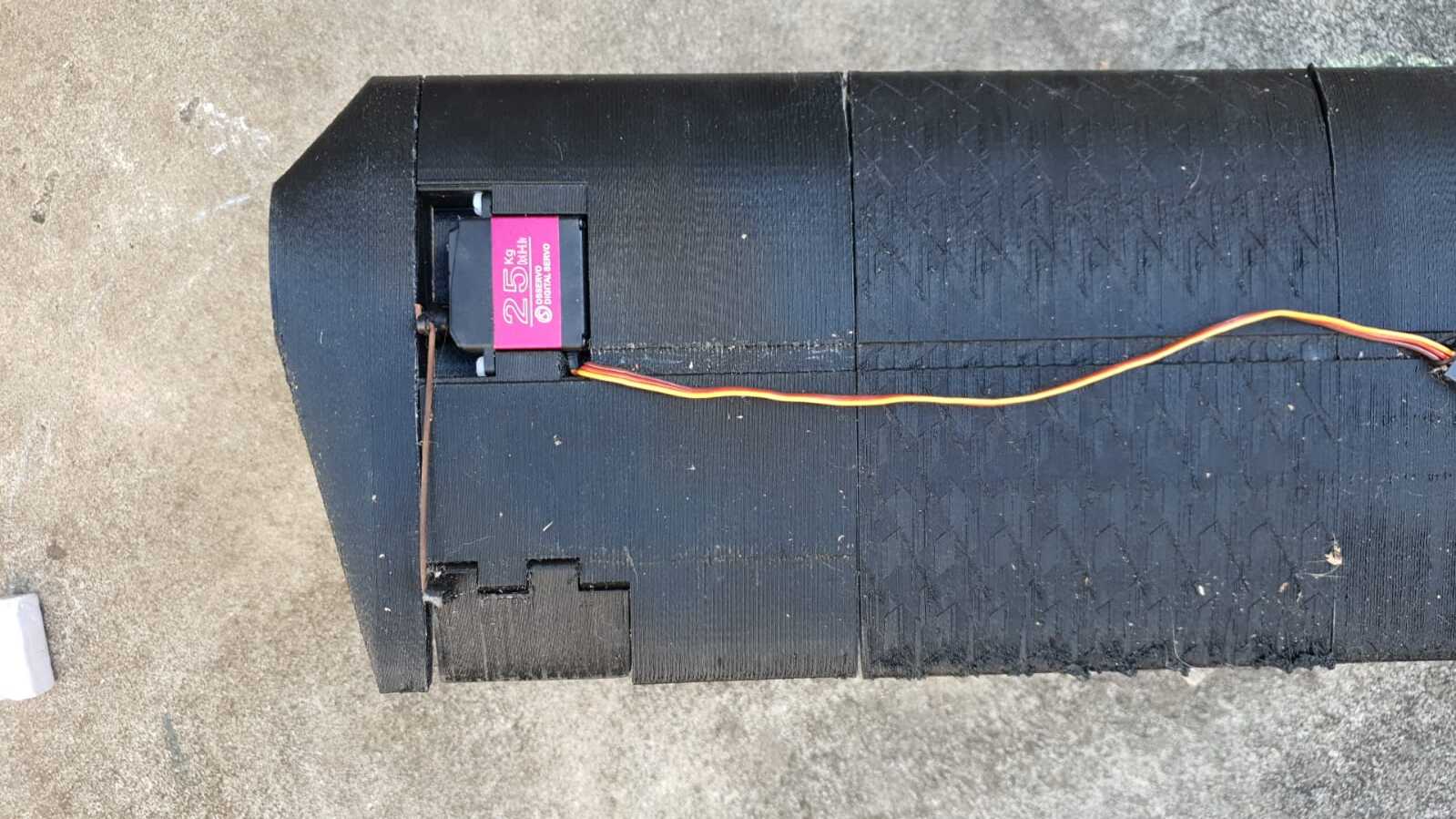
I designed and built a 3D printed foil wing with ailerons.
I also investigated and tested a few sensors for measuring the height of the board above the water.
I’ve also used Pixhawks / built drones, so I’m quite familiar with those.
My plan was to use throttle to control height/pitch, and flaperons to control roll/height.
If I were to start again I think I’d go the same approach of actuating the tail plane rather than the main wing. The main wing is supporting a lot of a weight, and the size makes it challenging to 3D print.
@mickeyt , we are using customized servo motors housed inside the main fuselage. One for each axis of control. We would assume the folks from Florida did the same.
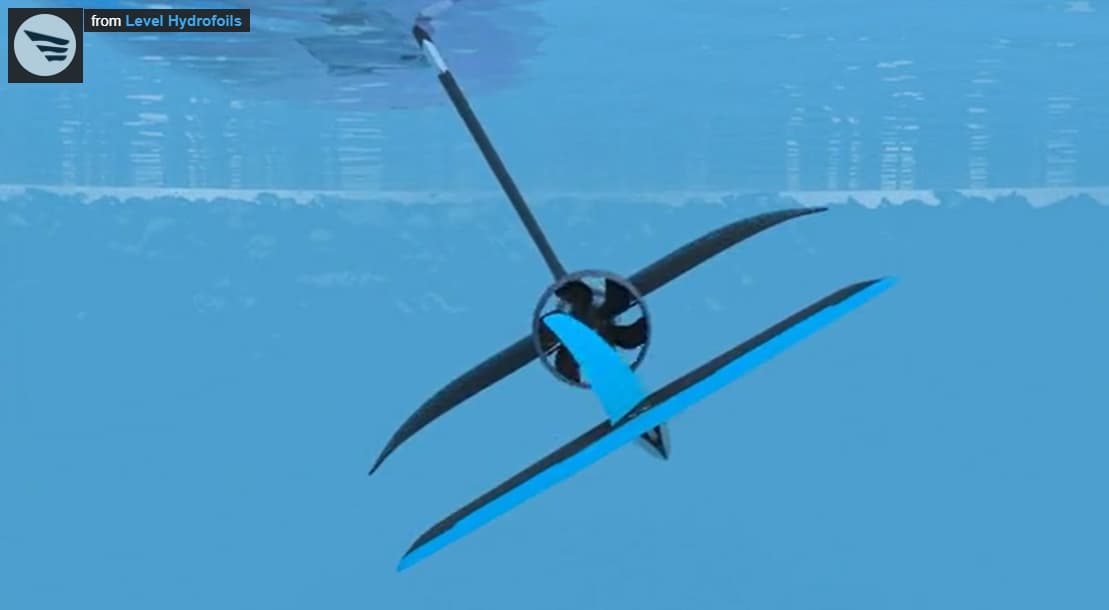
Nice and integrated wing design of the photo you shared! Consider sizing up the surface area of your flaps. It might work on scaled-down versions but on real life, human-carrying platforms would need much more torque on the roll axis in order to truly compensate for outside disturbances.
@lingvo unfortunately, we are not going to offer HW platforms for testing any time soon.