Starting with a placeholder that I can then edit.
First tests were completed on Sunday with an FR direct drive motor and board went amazingly well. I just need to get some pics and then I can upload everything.
Board: Temevento Slalom
Foil: Chinese foil (Slingshot Gamma 68cm copy)
Motors: - FR direct drive (not my motor but used it for testing the board)
- PG 6384 100KV Direct drive (Still need to test it)
- SSS 5684 750KV with Torqeedo 1003 gear
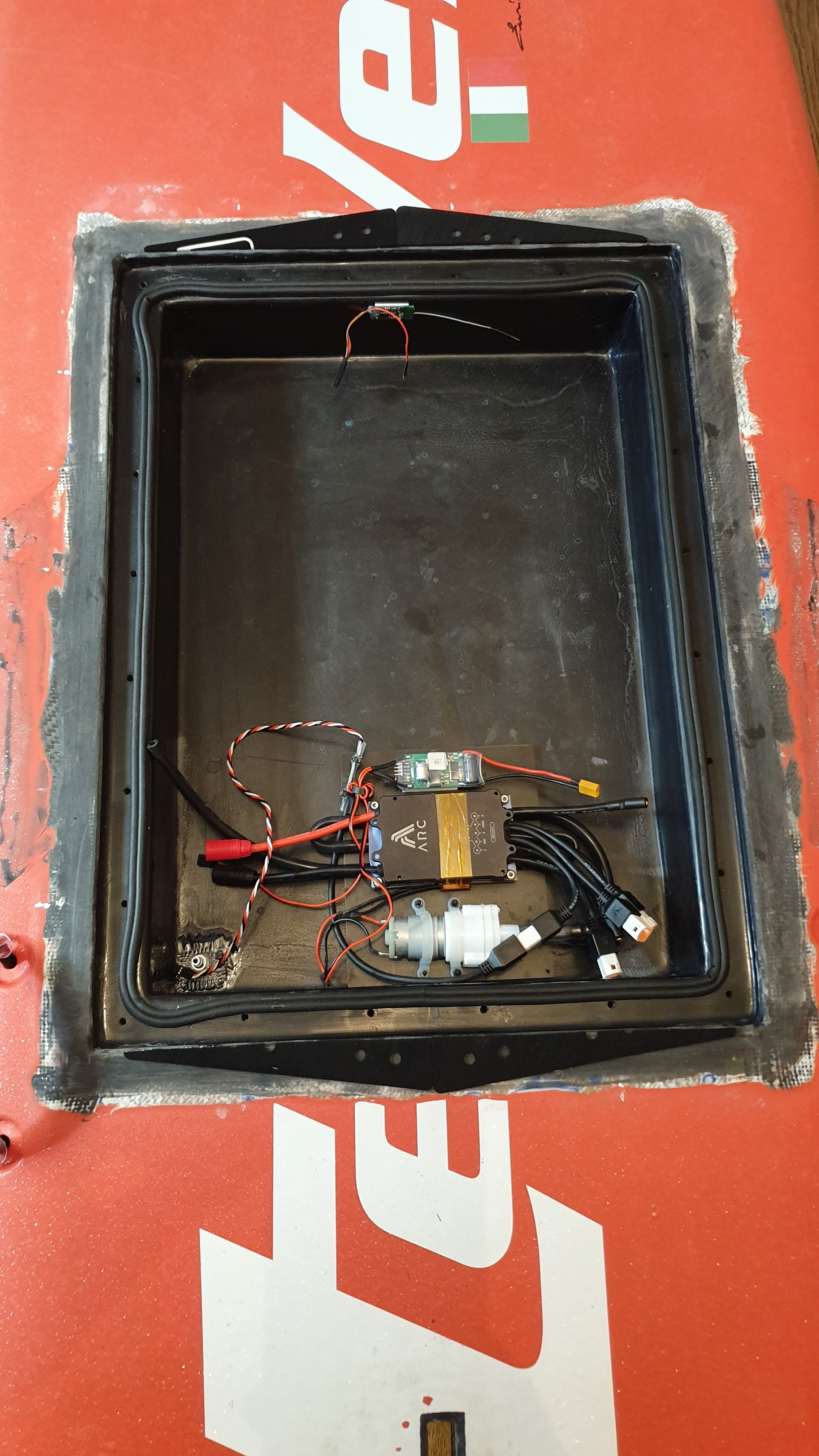
ESC: Freefly ARC200 with heatsink and watercooling
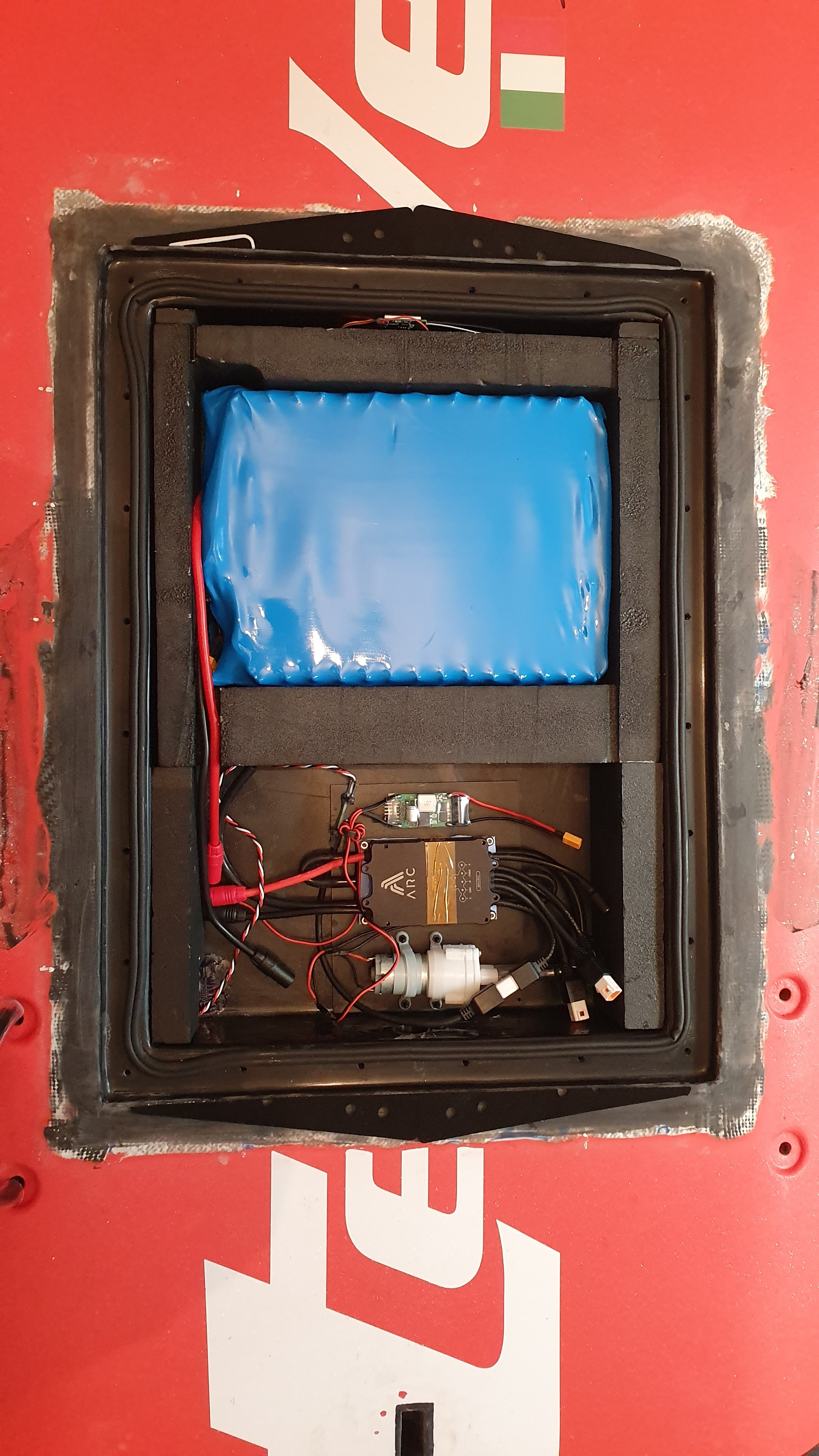
Battery: 12S14P (35Ah) with Samsung 25R cells. Fused discharge and BMS charging.
Now for some pics…
First the board. I still need to fix up the paint after the modifications. The board weighs in just under 10Kg, but 2.4 kg’s of that is the polycarbonate lid. In time the plan is to make a hinged carbon fibre hatch.
Now for the motor unit. This time I decided to make some parts from delrin. I went with a flying rodeo mast clamp (same design as Lift) which is aluminium and has the water tube inlet built in. I then milled an adaptor for the front of the drive. I used aluminium for a coupler between motor and gear, the delrin for the rear of the drive.
Would you recommend the ARC over anything else of similar electric size? Is 200A enough? I’ve no experience of the amount of current these efoils pull when starting/cruising. Just from reading people’s threads, 150A-200A starting and 60A cruising appears to be the norm? Obviously it depends of numerous factors though.
I limited the arc200 to 100A and it works fine. Gets up on the plane easily.
I assume that when some guys start off the pull the throttle hard and then get high current like 150-200a
I think the arc200 is the best suited from what I have tried. It’s got great overcurrent and temperature protection. It’s just quite pricey with the import cost coming in at about £85. When I was cruising I was reading about 65a.
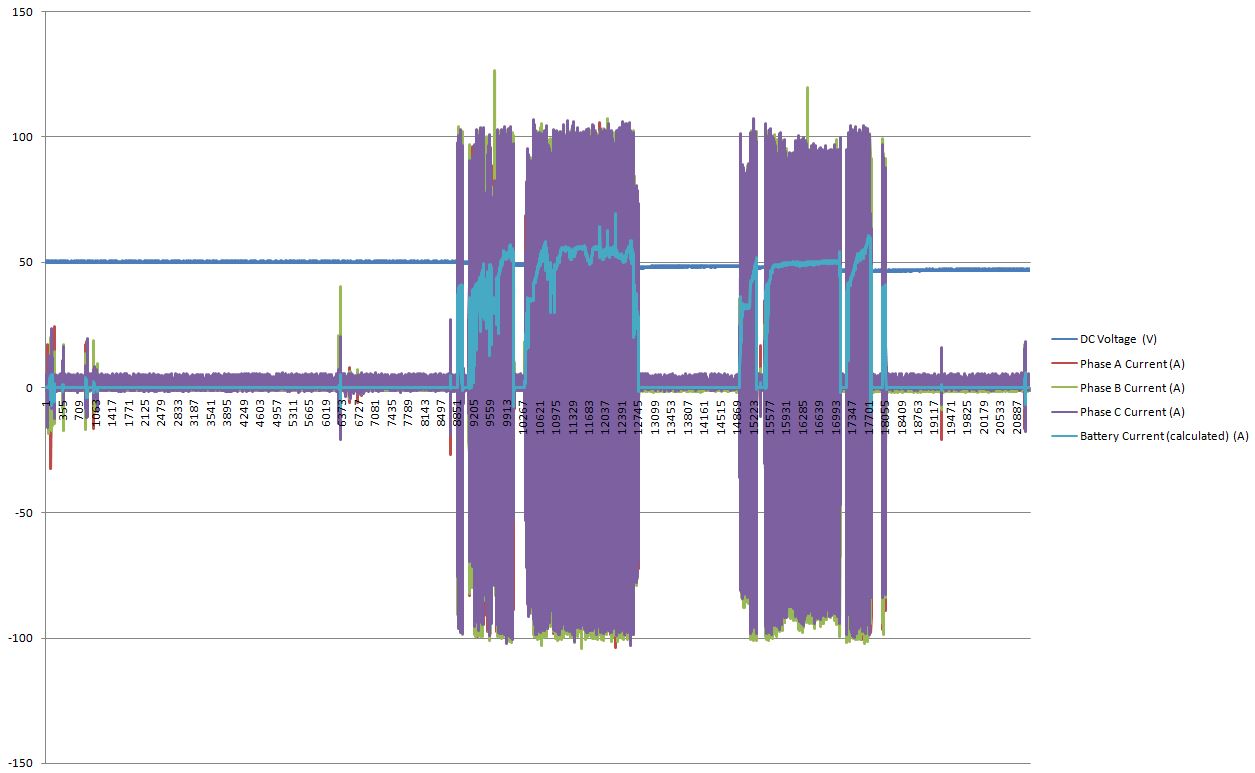
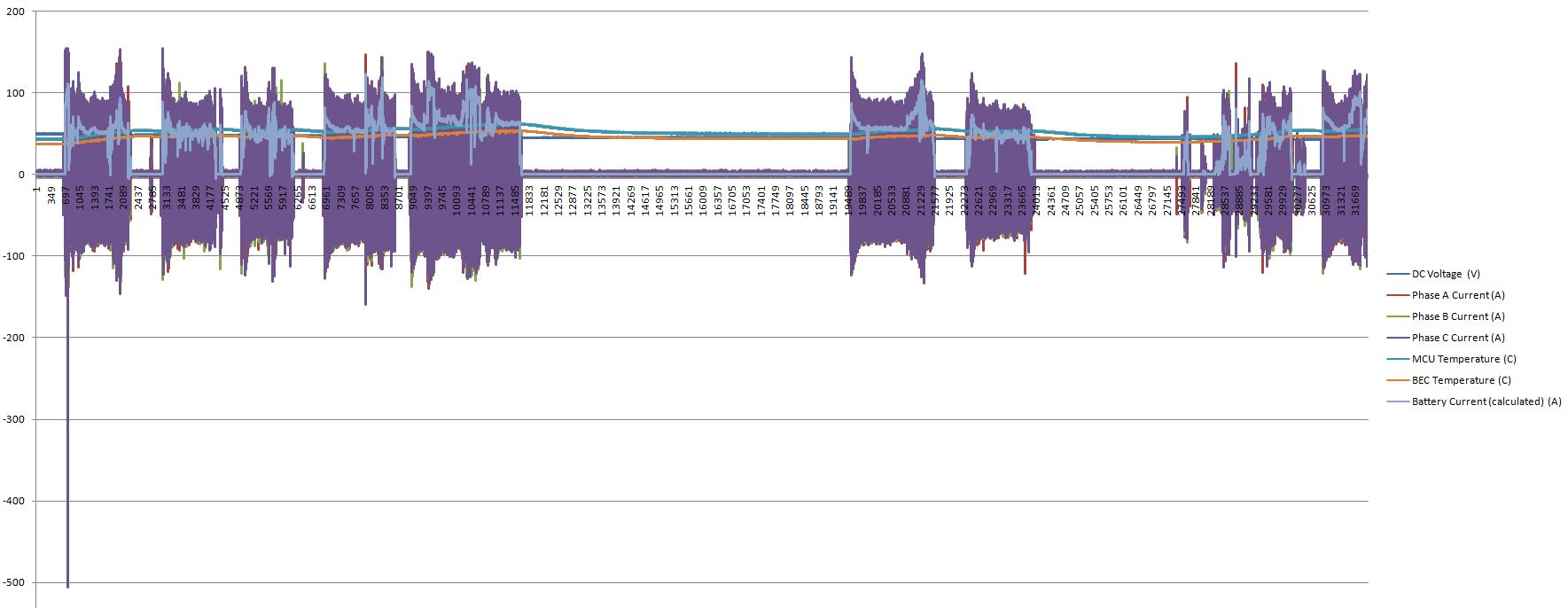
Next I tested my geared drive. The prop RPM can not get as high as the FR drive due to the gear ratio, but it should be noted that the prop has a higher pitch (similar diameter) and is 3D printed.
Once again I limited all currents to 100A max. I have circled the portions on this graph where I was up on the foil.
With the higher pitched prop I definitely needed a little more power to get the foil up. I have now increased all the current limits to 150A and will test the units again to see how they perform.
A very interesting stat is that I found I needed ±3000rpm on the 3D printed prop in order to get up on the foil. At ±2500rpm I didn’t have enough speed to get the board on the plane properly and I had to bounce the board onto the foil.
On the FR motor and prop I needed around 3200rpm to get the board on the plane and pop the foil easily. It didn’t need any pumping to do this. The motor is definitely more efficient and the properly designed prop really helps!
Another very interesting observation I found is how the length of the drive shifts the COG. The longer the drive, the further back on the board I tend to stand.
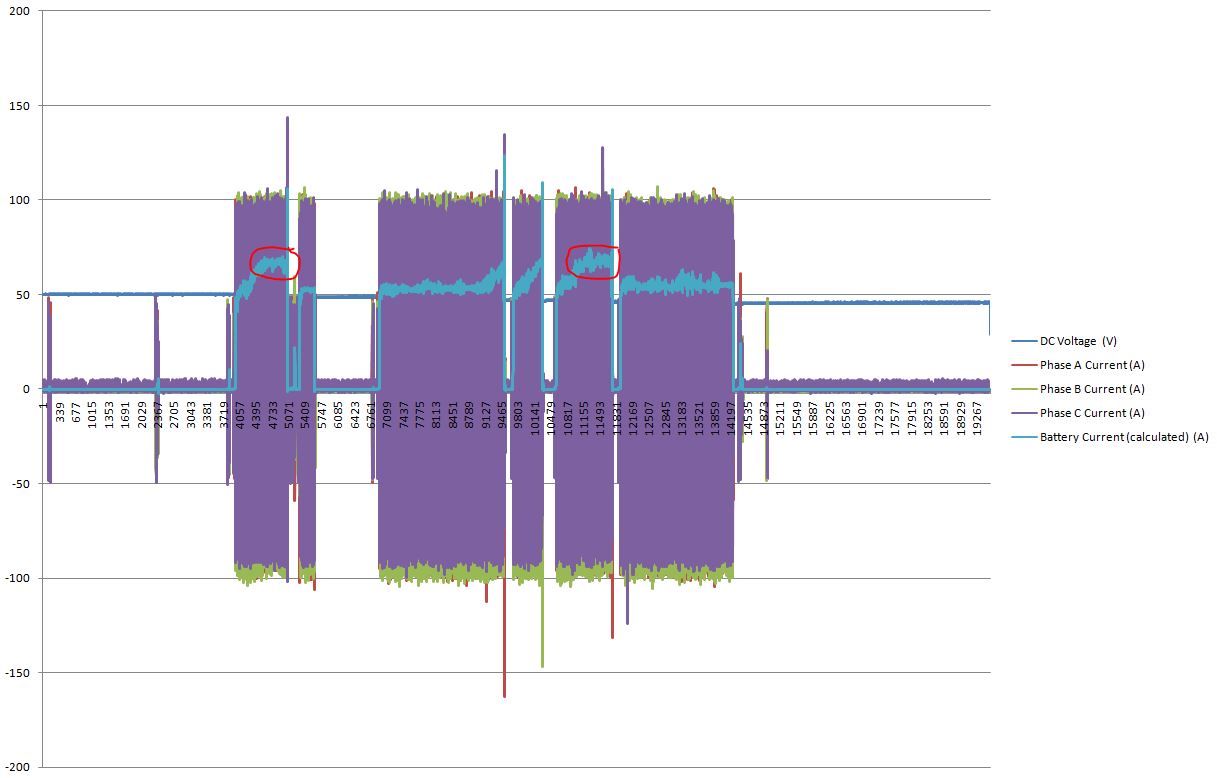
So after the last session I decided to up my max battery current and phase currents to 150A so that I had more “kick” out the “hole”. WOW did that make a difference! Fantastic acceleration and much better top speed. I did not need to pump the foil at all. Here are a few of the stats and a graph:
System time on: 67 minutes
Ride time: ±35 minutes (This could be longer if I just stayed on the foil, but was helping coach someone)
Battery Start Voltage: 50.3V
Battery End Voltage: 43.3V (±3.6V per cell)
Max Temperature of ESC: 62 degrees celcius
Max prop RPM: 3962
Max Speed: 32.6 kph
Motor efficiency at top speed: 90% (calculated by max possible RPM / actual max RPM)
On a separate note, I’ve only just seen your photo of the lift motor with the end cap off! The quality looks unbelievably good! Did you have a look at the non drive end too?
I (like everyone else) would love to know where they get there rotors and stators from! Alternatively, it wouldn’t be too much work to get something custom made for the forum.
Working on it for 6 months now, custom stators / rotor are extremely costly.
Step 1 design a perfect motor (rotor stator winding casing etc)
Then build samples :
-Either rotor stator are made by hand (very expensive)
-Or a mold is made for doing it mass production and it is really cheap, butinitial investment range from 5000usd to 10000usd (very expensive too)
Then you have to machine the outer casing, making it really watertight andalso use adapted bearings.
If your design has flaw you have to go to step 1 again.
This is not a simple task but we are close to the goal, we have made inrunner direct drive with one of the best efficiency available. We tested with riders from 70-85kg yet, and soon 100kg
Pricing will be around 650€ vat exc.
Nice one @Bender. I’m interested. Manufacturing is never cheap. I’ve just paid 8k for a small injection mold (completely unrelated to foils). How far off are you from having something to send out?