Thats what the motor is rated to. But that does not mean, that it will automatically limit to that.
If you prop is too big, it will draw so much current, that the “motor current limit” in the VESC will be reached. At that point, the VESC will simply limit the dutycycle to whatever value needed to keep the current below said maxiumum, therefore limiting the motor voltage (motor voltage = battery voltage * duty cycle (roughly). And as power = voltage * current, the power will also be limited.
If this is the case, the solution is to make the propeller smaller, so the current limit is reached later.
Think of it the other way:
The torque produced is proportional to motor current. If motor current is limited, also torque is limited. Lets say your prop is too big, needing a lot of torque to spin, therefore not coming up to speed.
Power = 2 * PI * torque * RPM
If the RPM are low and the torque is limited to some value, the mechanical output power will also be low.
Make the propeller smaller, then the max torque will be reached at higher RPM, so also mech. power will be grater (and the whole system much more efficient)
In order to estimate needed pitch of the propeller, you can use this tool: Propeller-Rechner
If you have the 190kV motor, you can reach up to 8000rpm at full duty. If you want to drive at 22kmh, you only need 2" of pitch on that propeller.
With a common 5" or 6" propeller you will overload the motor / VESC
To add to this, see below for a typical efficiency curve of a BLDC motor.
As you can see, the motor is most efficient at rather low torque, high rpm.
So again, if the prop is too big causing too much torque, efficiency will be low.
(X-Axis is torque)
What about a pad - like a dish sponge - under the head sink, it should give a bit more thermal mass to the heat sink as it will have to heat that volume of water as well.
Thanks for your explanation! I’ve ordered a bluetooth module that will hopefully be here soon. Today I limited the motor current to 50 amps in my vesc. I only just couldn’t get up on foil. I went up to 70 amps and could foil easily. I foil happily at 60% duty and reached 70 amps finally when I started to push it and got a bit of speed up around 75% duty.
Will my best bet be to change to current control with a 70amp max?
@Strongarm good idea! I thought about another heatsink but that may work quite well. Will try tomorrow and report back.
So with current control and max motor current set to 75 amps I can get on foil at 70% ( 52.5a) and cruise at 55%(37.5a). This still overheats the vesc rather quickly. I have found a sponge does not dissipate the heat enough. I can pump at 35% current and the temperature slowly drops.
Any ideas? Larger controller or will a larger heatsink help? Will a heatsink stacked on the existing be enough?
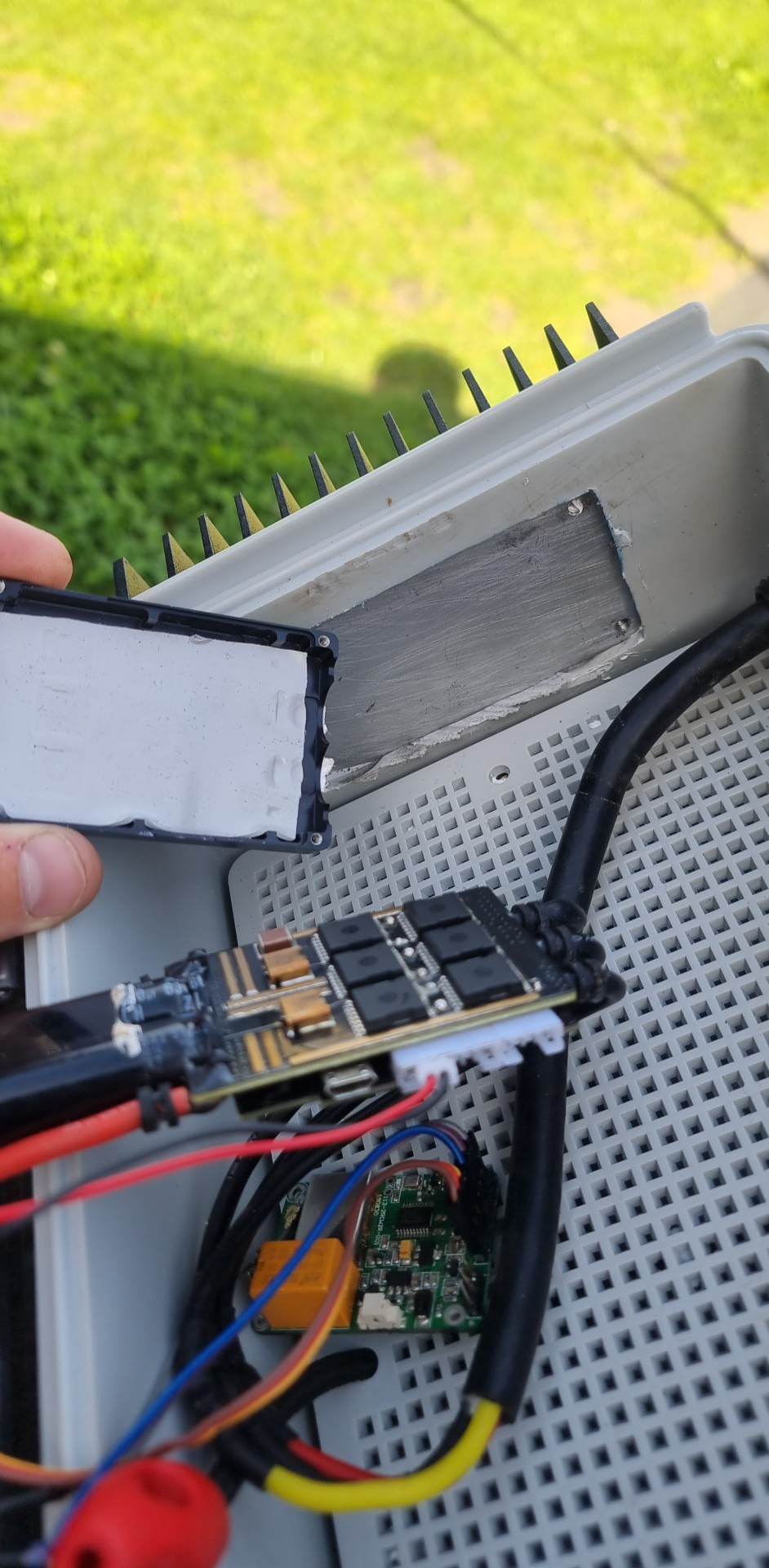
So I removed the aluminium enclosure and used a thermal pad to get good thermal contact direct from the mosfets to my external large heatsink. If I keep my motor amps really low (30 amps) the controller will stay cool. Anything more and it will gradual increase to 80 degrees before my thermal limit. At 50 amps motor current the controller will reach 80 degrees in under 1 minute!
I used the back half of the aluminium enclosure initially as a clamp however this got really hot! I printed a new enclosure for the rear so I could clamp it tight to my heatsink. This had minor improvements.
Lesson: the maytech 100a esc with heatsink will never stay under the temperature limit at over 30a regardless of contact with cold outside air. Only solution I can see is a custom water cooled enclosure.
Depends on how you use the controller, in regards of duty cycle. If your prop is too big, your duty cycle will always be in the 50-60% range, that is producing a lot of heat.
Interesting. With duty cycle at 50-60% I’m only going around 18kmph on a very efficient wing. I can easily go much faster and be with a higher duty cycle but this would increase motor current which I would think in turn would add heat?
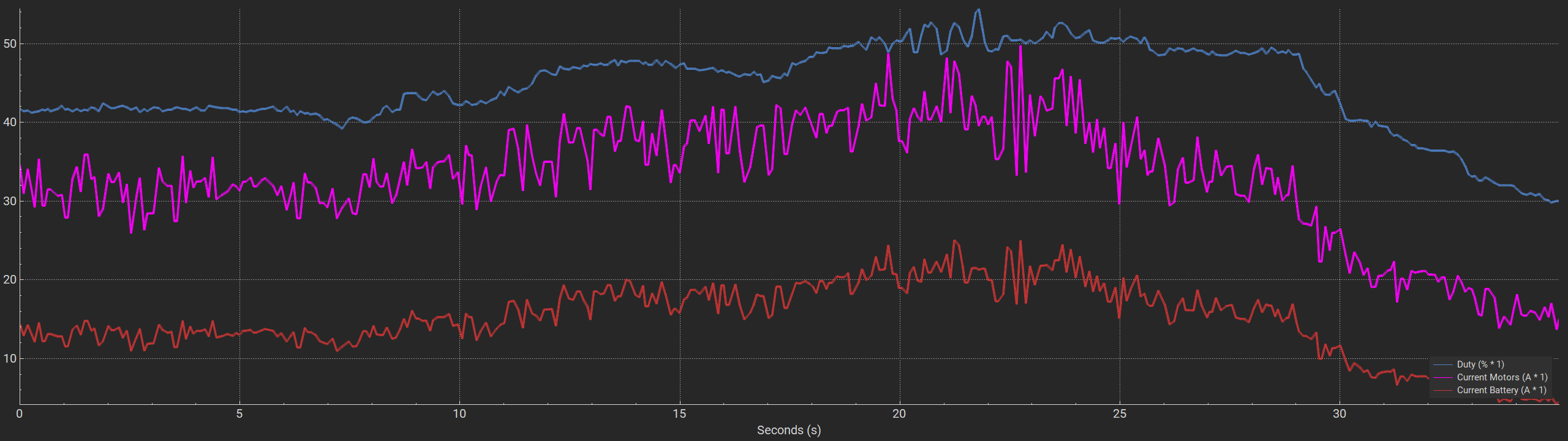
I’m using current control on the remote so I could control the amps. 6374 (advertised as 6384) motor rated to 3200W. Max current set to 70amps (70 x 44.4 = 3108W). Attached is a graph from VESC tool which should show. Full throttle would see me at 70amps. I have only pushed it to around 85% as I’m using a large wing (Axis 1150 PNG) and struggled to hold it down at 28kmph.
I understand less pitch will mean less speed and in return higher voltage/less current to maintain same speed which would reduce heat? I just thought it wouldn’t be overheating at 40A motor current unless there’s something more I’m missing about duty cycle?
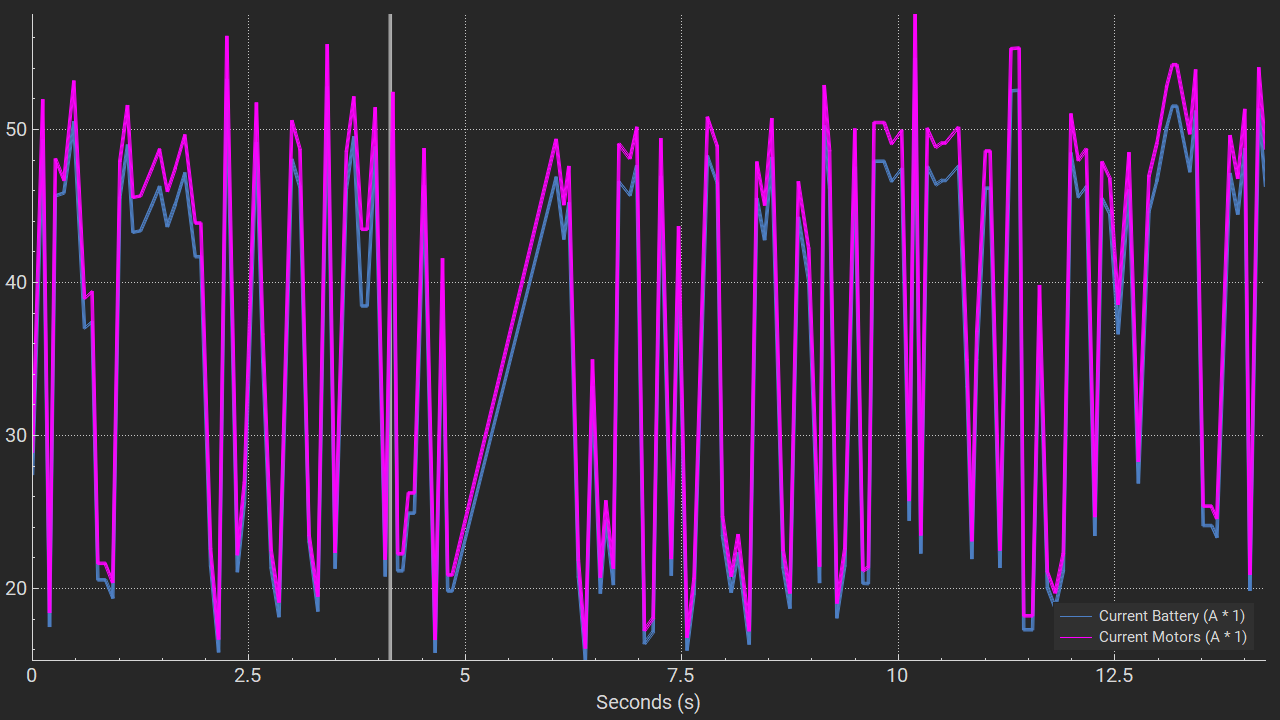
What is the cause of the current spikes? My propellers are only printed from PETG and will add carbon reinforcements during the week. I feel the slippage is rather low though to be causing such high spikes.
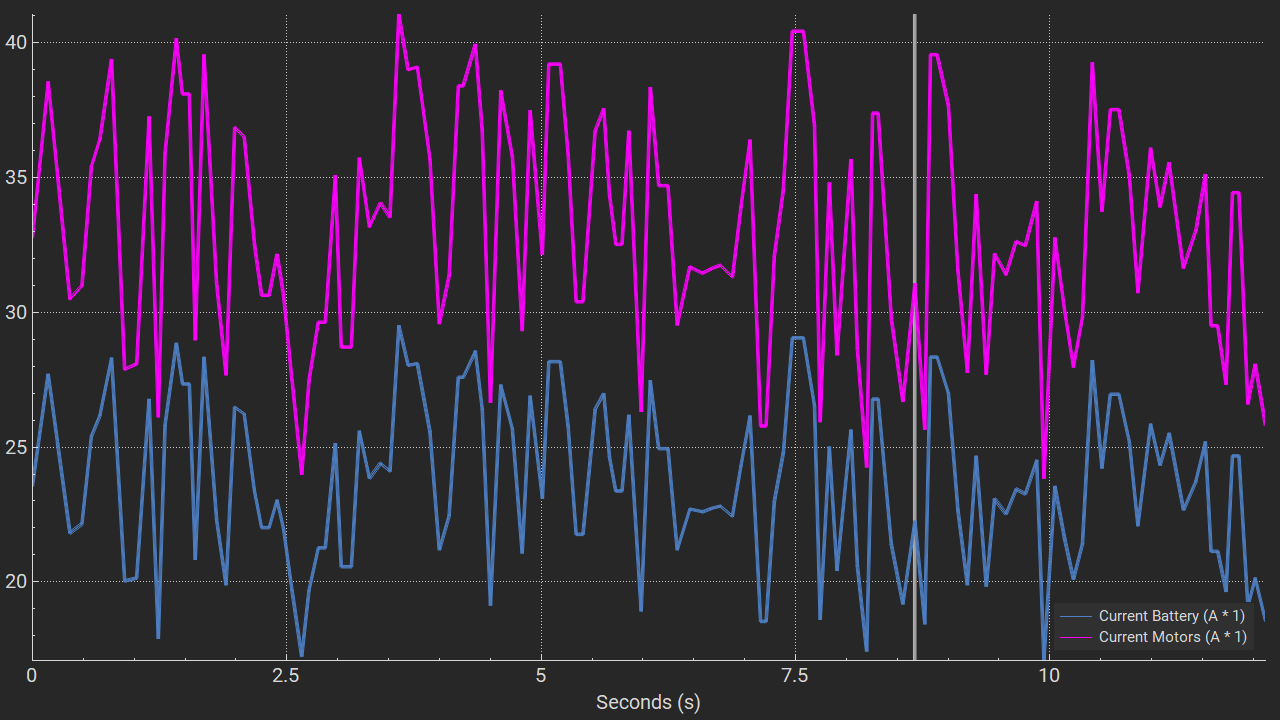
It seems like poor torque control to me, there is a difference of 250% (20A—>50A) on the output current on the 95% duty curve. Does it feel like it’s oscillating also on the riding?
I wonder if the motor and esc is not matched with the right settings when seeing the curves.
It does not feel like it’s oscillating. It’s really strange and I’m pretty certain it’s configured correctly in my vesc. Could it be the motor playing up with higher voltage? It is a cheap no name motor.
You could get current peaks and problems if there is a short in the windings but i think the VESC would shut down if this was the case.
I’ve had a shorted motor like that where the short was small enough to be unnoticable with a multimeter, controller refused to run motor and the short could eventually be proven with an isolation tester. I rewound the motor and then it worked as it should again.
Whereas motor /propeller matching has been pointed out numerous times sometimes investigated from the ESC records, slippage was approached more from the angle of effects (GPS speed) rather than causes.
2" less than the 6" (150mm) consensus …
?? A spring effect like using a soft mast+fuselage with a high aspect (HA) ratio wing made out of high modulus (HM) carbon (Gong case reported here end 2022) ?? (just speculating)
Many members here have a large propeller set including: FR + Flite + Manta + EML + printed ones
OK I will definitely look into that. If there was a short in the windings I would expect current spikes straight from startup? There’s no issues while maintaining duty cycle under 60%
Spring effect is a good point. And could explain it as the blade either catches or doesn’t on each revolution. Being a foil the speed decrease would be negligible while you’re gliding.
I do have a folding propeller from eml-store/propeller king that’s much stronger than my PETG propellers. Will test/log that tomorrow at higher rpm and see if I still get these current spikes.
This is the problem with a marginal short circuit, it can be the case that it occurs only at higher voltage if there is enough isolation to resist lower voltages (voltage in this case means motor voltage = batt voltage x duty cycle). But i think this is not the most probable root cause, i would still guess on vesc/motor matching.
If you can get your hands on an isolation tester it’s easy to measure, you can do the measurement at 125 or 250V in this case.
I wonder regarding this. Current equals torque (if control is good…) and the 95% duty diagram shows transitions from torque 1x to 2.5x during at least a second. That’s got to be noticable if the reading is correct.