in my darkest efoil hours I need your help. I have converted one of my setups to bigger motor (before 65xxx) and purchased Maytech 70182 with 120 kv. The motor has 10 pole and quite some torque.
The setup did run well with old motor, 14S batt, maytech efoil remote and different vesc. However, with new motor I see stutter at mid erpm and it wont accelerate anymore. I have tried:
4 x different VESC with different FW reaching from 5.x to 6.2
no issue at start, motor current up to 200a
no issue in air reaching full duty
played around (a lot) with flux, resistance and all values you can think of. I have found some suggestion in VESC forum, like halfing KP and KI, but no sucess
cross checked VESC and remote options with 100kV 65xxx motor, no issue
More confusing: Today I have tried some static testing with small printed prop in water; it was running well and reaching up to 21k erpm with 100a motor load…values I cannot achieve while actually foiling. I did not expect the static test to be successful. My intention was to use it to tune on parameters. Now I am wondering what could make the difference while foiling.
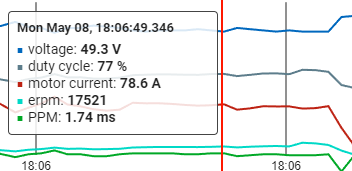
Here is the static test
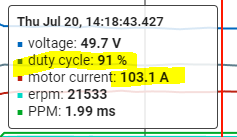
Here is foiling, stuck at around 17k erpm
I am running out of ideas actually and quite desperate. I bought two additional VESC showing same behavior and spent hours on reworking and testing.
I guess the difference between on water and static is the propeller and the set current difference (except the huge difference in ambient flow speed) and that poor motor control/matching is the basic issue.
Could you try it static with the normal prop from zero to full throttle, clip results from vesc tool and upload?
A note on the motor and settings, if you don’t increase motor current you won’t actually get more torque out of this bigger motor. I’d set it higher than 100A, but maybe this was just a setting since there are issues?
I saw some test where vedder optimised a vesc for u-15 motor, it might give some insights on control optimisation: Nextcloud
later i’ve read that the Vesc observer code might somehow be bugged. Mxlemming wrote a new observer code, don’t ask how you get it running though, i haven’t tried myself but it’s mentioned here: https://www.youtube.com/watch?v=VGnYwuCFPi8
I am afraid that with normal prop I will kill something. I do have a 6" FR prop, I could give it a try.
My motor current is set up to 190 or 200amps, otherwise I would not be able to start. The 100 amp referring to my static test with small print prop on full duty:
I have already followed that video from vedder and followed video instructions like reducing inductance and kp/ki set to half.
btw: what kind of results you want to have clipped from vesc tool?
Ok, if you already did that then i guess you’ve tried some of those things already.
but one thing, i think it was the opposite in that they increased kp and ki - which was equal to increasing the observer gain in the video.
Do you get runaway current in vesc tool when the motor starts running poorly?
Have you tried manually setting the motor parameters with calculated / measured values?
Have you done an isolation test on the motor? If there are small shorts breaking through at higher current/voltage then this can screw up the motor control.
Edit: i don’t think trying with the bigger prop is a particular risk, as long as you don’t floor it when motor control is poor and set “abs max current” to something reasonable (250A?)
I don’t think you’ll see the spikes in metr, better to do it in vesc tool with the right prop. A logged plot from vesc tool while throttling from zero to full (or to runaway) when current is set at 200A is what i’d like to see, it would prove if there is loss of control and others might be able to identify where to go with the parameter setting.
I guess isolation is a longshot, as you say it should be a larger risk for shorts at higher duty. I always test it when i have issues just to rule it out.
You need an isolation tester to do it properly but an ordinary multimeter can do at least a test at low voltage. Set isolation or diode mode on the dmm, connect one lead to the windings and probe motor axle, shell, bearings etc with the other. You need to poke hard enough to scratch to ensure contact. If there is any leak detected it will beep or show a lower resistance value than “OL” / open lead.
I would also try to variate the switching frequency in steps with other settings constant just to check if it has an influence at all.
I think the throttle calibration is confusing me.
But yes, it is already on the agenda and a valid point.
At the moment I am running on G300 VESC. It has phase shunts and overall it seems to be quite high quality. I do like it allot (even it runs also not the motor properly )
Give the remote max throttle, plug in power to esc, wait for beeps (normally 3 depending on brand), release throttle, hear more beeps, and then it’s calibrated… Then power cycle it.
Then just test the failsafe is set to zero before using it.
Just a thought, couldn’t keep my mind from your issue… that prop doen’t look too good, is it what you’re running?
Anyway, could it be the prop vibrating/oscillating during certain conditions? Might be worth it to cross test another prop if you haven’t already.
that was just the printed one for test purposes. It is 5" or something and I cutted down the wings to have it consume less amp in static test.
If I go true foiling I can chose between 6" FR, 7" Easyfoil or 8" Shadow prop, all of them are CNC from Al.
so here is a static test with 6" FR prop. As said before, it is pulling amps a lot. First log with limit set to 185a, second log with limit set to 210a. One have to admit that it is keeping the limits quite nicely. Still, I do not reach the max erpm with this limits. Third log is another time cutted printed one, same same than before (VESC settings)
How do you mean it’s not reaching max erpm? That only happens with no load, but i guess you mean something else?
As long as you reach the set motor amps it works as it should, in current control mode rpm balances against the resistance from the prop so only way to get more rpm is to increase motor current or decrease load.
It’s not going to full erpm with FR 6" prop in static test because of motor current limit, correct. I think I cannot do static test with driving prop because I don’t want to set motor current to 300a+ or whatever is needed to get max duty.
When foiling the issue occurs around 16erpm. Maybe it is related to some turbulence of the clamp causing swirl at certain speed?
Could be, I’ve run into that behaviour with outrunners, sometimes the flow starts cavitating, there is a rough running, slurping sound and a cloud of bubbles after the motor. Do you get any of that?
Water flow is weird sometimes, I tried my gong v1 setup with my ypra wing yesterday and had a whistling sound the entire run - so annoying!
I havent ever had something like that with any other wing!

 )
)