Hi there,
been struggling with a budget to build my foil, and since the Gearbox is one of the most expensive parts, been looking for alternatives in Aliexpress, since i saw one of the Factories of Neugart is based in China, i was betting there could be clones already at sale.
Got mine today from these guys: This product is no longer available.
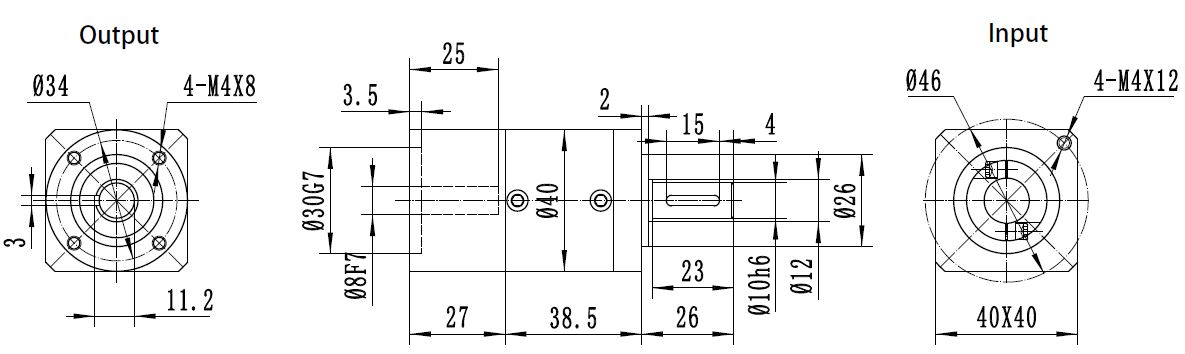
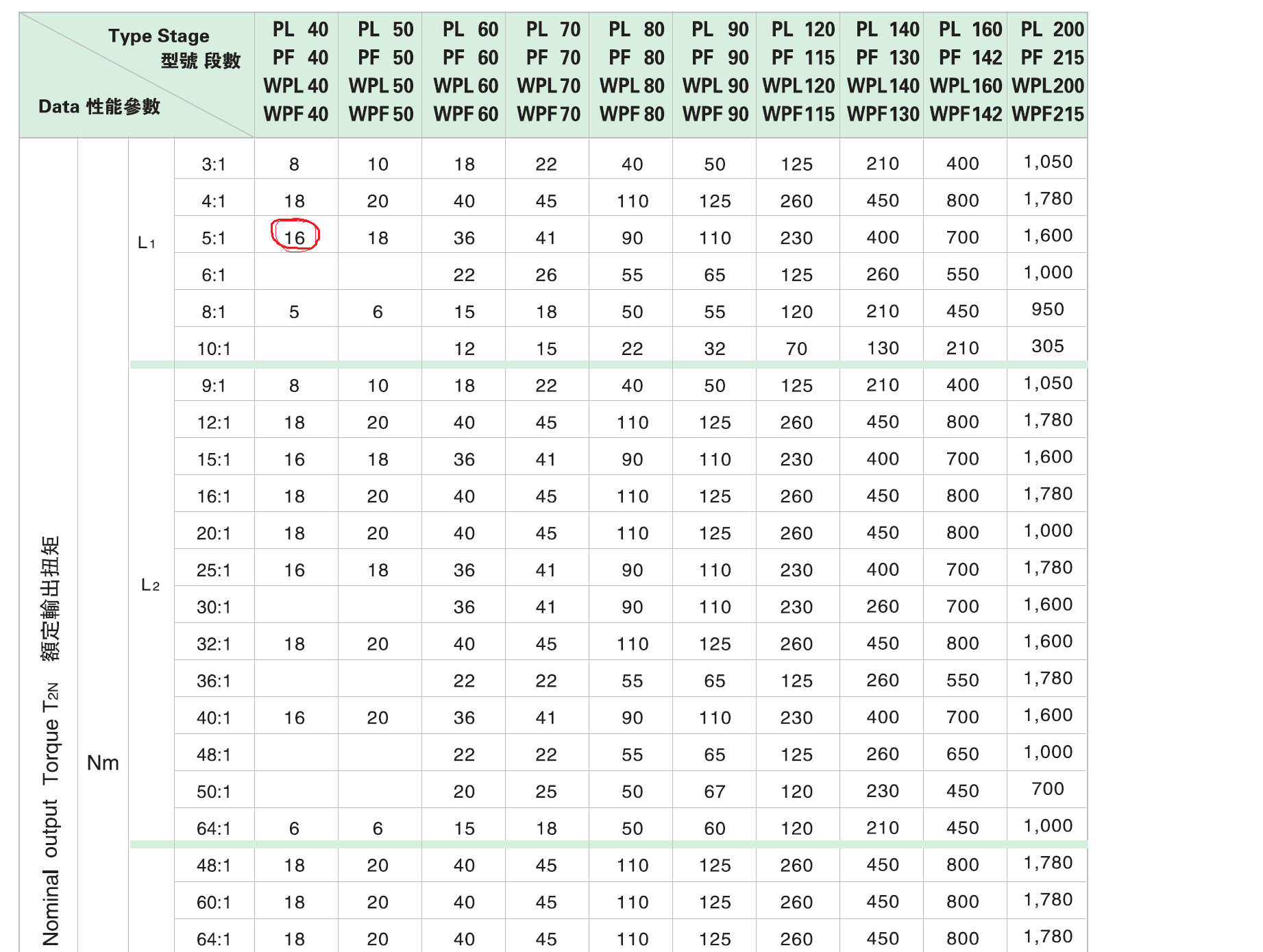
Looks ok, so far, haven’t tested yet. What I figured out when searching for a Neugart PLE40 clone was that torque specifications vary and some only have a max torque of 6 or 7 Nm. Mine should have 16Nm but we will see. It was also quite time consuming to explain them what size I need an specify all the parameters (started in beginning of February with inquiry). They made a drawing according those specs and custom built that gear.
If I’d order again, I would change the diameter of the center line the output side M4 holes from 46 to 48 this would allow to use M4 screws from the back side of the square flange.
Do you need a belt with that 90deg angle gear? You could run a long drive shaft down the mast and have a large diameter pancake outrunner in the board. The drive shaft would probably need some supports so that it doesn’t wobble in the mast. The nice thing, there is almost no size limit in the board with a vertical motor, you can go super low kv with massive torque. The downside is more motor noise/vibration, harder to cool and more weight on top, but I see no major showstoppers. Go build it. I think the 6063 profile might be a bit weak.
Here is an idea I was thinking.
In NZ we have dagging plants. It’s a brushed motor that spins about 3000 rpm down through a flexible driveshaft to the handpiece to shear away the wool.
Dremels also use this system, and they are very robust.
You could mount what ever size motor on the board, run the flexible drive shaft down through the inside of the mast, and down to a prop on the bottom.
I see some pedal powered boats use them. But obviously much lower input speed, and if using a motor a sudden change in speed may cause problems on the flexy shaft?
It’s good to set te motor off to the side and timing belt drive it with a 5mm HTD belt. This allows you to change the pulleys easily to alter the drive ratio.
I think is makes sense. The water is traveling faster at the output of the prop, then it is in front of the prop. So with a pusher the frame work that holds the prop is in the slightly slower traveling water. The opposite would be true with a puller.
Sorry, still not tested but I’m, getting closer, I have all the parts to build the pod but I need to finish my hand controller (acceleration and deceleration ramps to protect the gear) before I can test the setup. Depending on your schedule there could be new direct drive options available with low KV in-runners soon–this could eliminate the need of a reduction gear.