Here is my dual motor tow boogie build which started in march 2025 until now.
The reason why I abandoned my e-foil assist was to foil purely withput the extra weight and also learn to pump foil more easily.
I heavily relied on my 3D printer thats why many parts beside the electronics stuff can be printable, even on a small printer like my A1 mini, but you will need a lot of filament ![]()

All my created files are located here:
https://makerworld.com/en/collections/6660539-e-tow-2025
Main Parts:
Bodyboard 105x51x6cm
2x VESC 75200
2x Flipsky 7070 Motor
Battery: 12S4P ~12Ah usable
Accessories:
Battery/ ESC Box: https://de.aliexpress.com/item/1005007922241712.html
380x310x115mm
Many M6 nuts, m6x35mm washers, M6x20/25/35/40mm screws and M6x90/100mm screws.
Remote: Custom with auto return to me/ follow me
Receiver: Custom
(just for completeness here, I don’t plan a release at the moment)
Build and first steps
I started with motor position in the middle and only got around 6~7kmh until the board made superman and came out of the water.
I put it on 2nd try 18cm more in front and got even worse results.
The best position is what you can see on the picture, at the very end of the board.

The next problem was the hook for the wakeboard rope. I started of course on top of the board but that pulled the board up. So I designed/ printed a hook underneath the board and voila I got good results, but less efficiency in terms of power consumption.
I started with a 28mm wide wood rod and attached my rope there. But the forces were concentrated mostly on the mast base plate and I think in the long term this would lead to a failure or worn out mast/ base plate board connection.
Thats why I chose an aluminum profile with a 25x25x2 mm size and 1m length. This suits perfectly to create a very stiff connection with the rope and also stabilizes the whole tow boogie itself.
Another major point was to add a 5 degree rotation to the motor pod holder, as this gives the board a slight pitch down when powering the motors and less moving up out of the water. Check out the available motor pods (0, 5, 8 degree).

Steering
This leads me to how to steer this thing. I found out that I can make relatively fast/ forced turns when I am high on mast and pull the rope towards me. This may be because the alu profile is controling the whole board.
One problem is to find the right balance on roll axis. As I only have 2 “small” 6S4P batteries in series, the weight is relatively low for a heavier rider with 80+ kg and therefore if the COG is slightly off you will see it especially in curves.
I added a fin to stabilize especially in turning.

Electronics
Fairly easy, as I already did a dual motor mountainboard build. Just setup each VESC with its motor and then setup communication via CAN.
Both VESC setup nearly identically:
Max Current: 100A
Max Battery Current: 40A
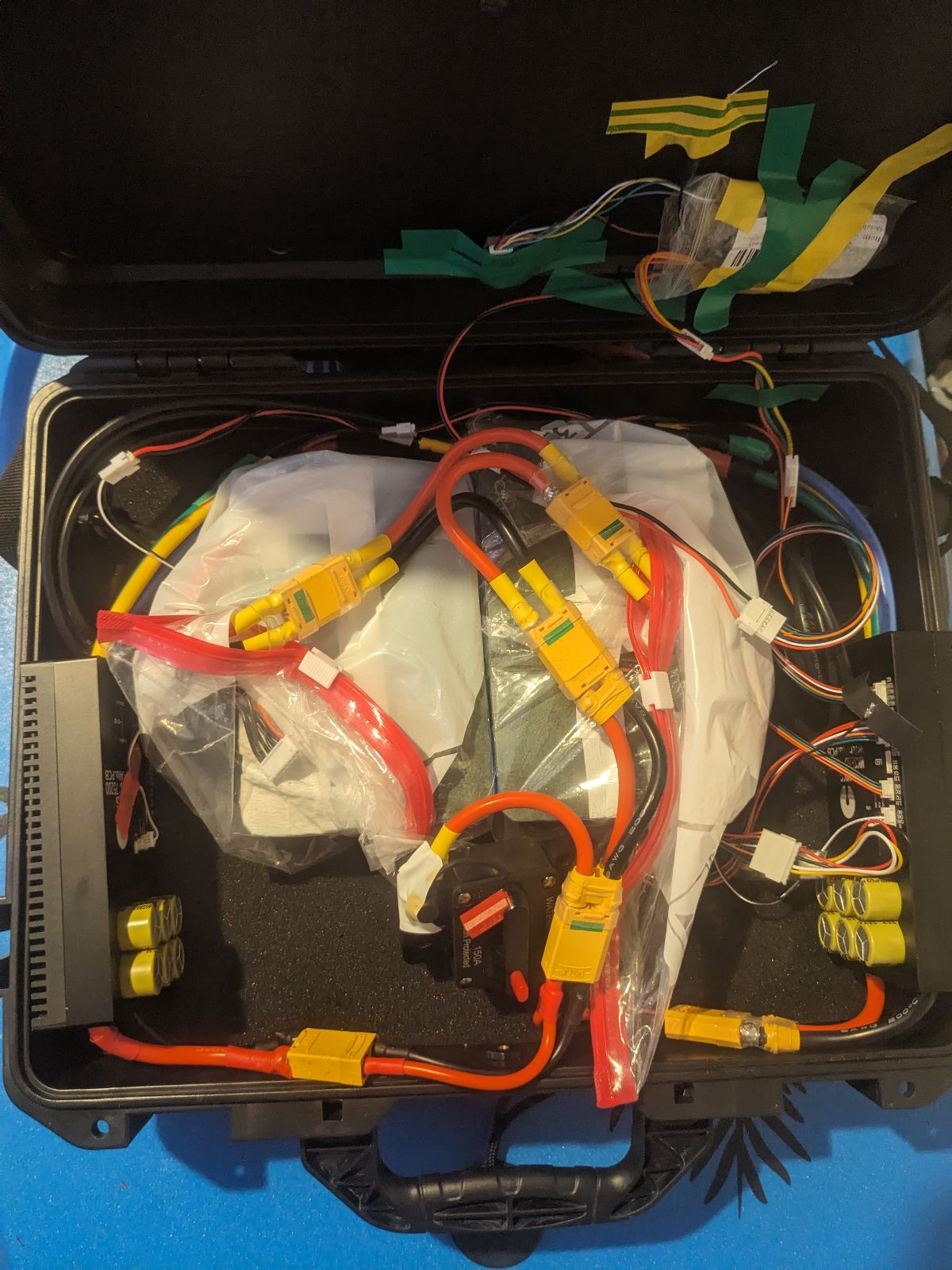
I should have put the batteries to the outside for more weight stability, but it is what it is now. My next battery pack will be 12S6P and will get put to the outside.
Current runtime is around 30 minutes with maybe 5 starts and continuous foiling.
Remote Control + Auto Follow/ Return To Me Mode:
I developed the remote/ receiver myself (actually a follow up of my e-foil remote) and wanted to have the tow boogie comeback to me automatically after pressing a button. This works really good and I am very satisfied.
Propeller
I wanted to use my e-foil propeller but it snapped in parts after one heavy superman/ touchdown of the board, so I designed new ones which are sturdy and hold until today, but less efficient. (also put some epoxy on them)
Next steps
- Build a bigger battery for more runtime and more weight
- go back to 0 degree motor pod for higher efficiency
- design more efficient propeller
First ride of me. This was without fin and only alu profile attached to the under mast section.



