In the near future my plan is to make a efoil board. I’ve been drooling over your guys projects in some time now . And finally the past week i’ve spent alot of time on here.
Im pretty much settled with jet propulsion since it seems quite forward and safe.
From my understanding people is using 500kv motors with out at gearing?
And then some coupler or what it is.
Thats for Ø6 to Ø8-10mm ish right?
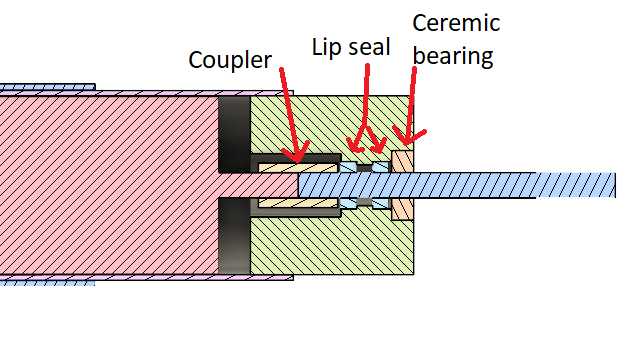
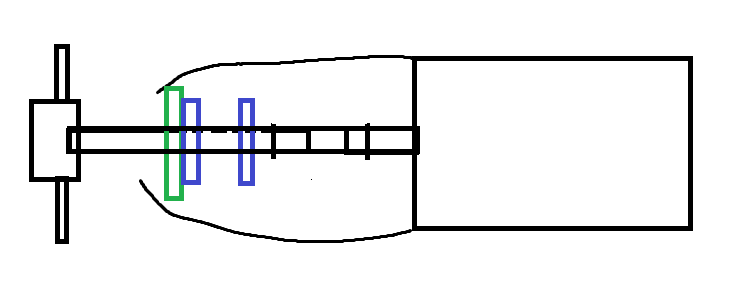
My probably main question is how these shaft seal double lips things work or how they should be placed in order to keep it water proof
I think i understand the main part of the other components. Otherwise ill ask you experts
A rotary shaft seal is a device to maintain a sealed environment around a rotating shaft. for example it is used to keep lubrication oil inside a gear mechanism and have the ability to transfer the rotary motion out of the sealed environment. you choose the seal based on the diameter of the shaft, the outside diameter of the seal and factors like the temperature and pressure. you need to take into acount that the linear surface velocity of the shaft will not exceed the design limits of the seal.
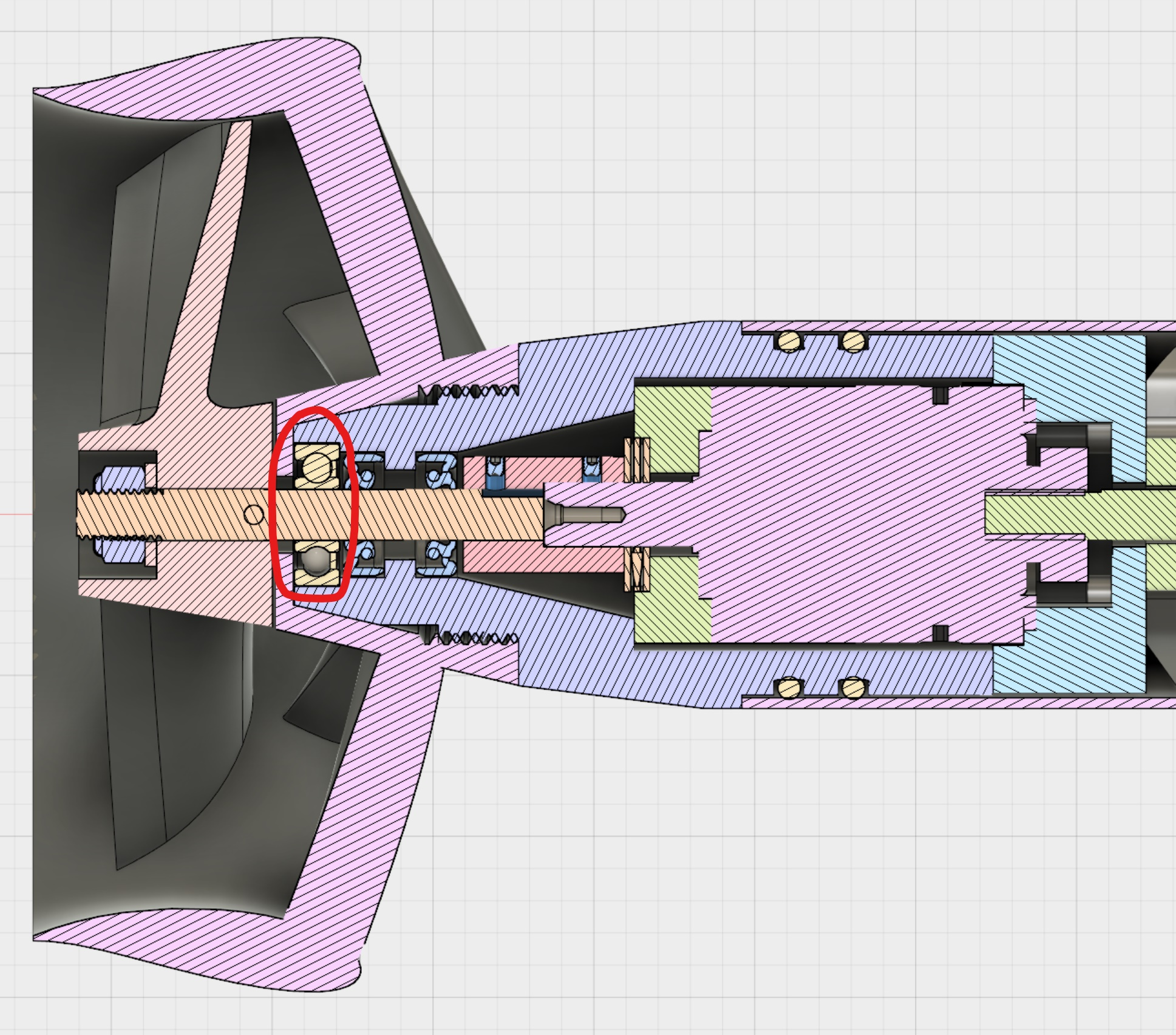
Not the circled part but you are saying that i should also have a Thrust Needle Roller Bearing like he’s got right? Thats for the linear surface velocity?
I pretty much need to design something like his end but with out the gearing for jet propulsion?
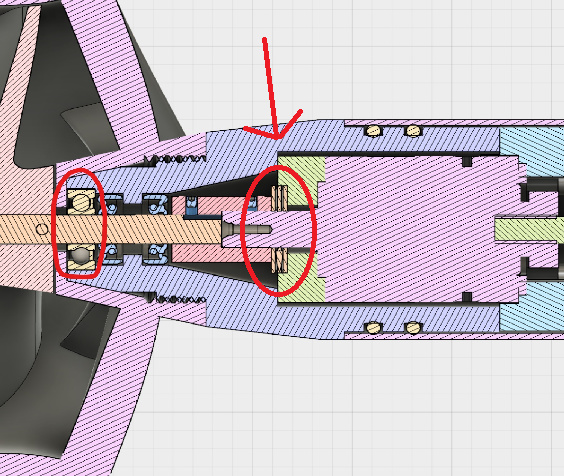
He has two because he puts some marine grease between them for extra safety. So the outer seal should already keep the water out (and grease in) but then the grease comes as a second line of defense. The thrust bearing is mainly there for saving the gearbox by taking all axial load put on it by the thrust created by the prop. (the gearbox doesn’t have axial bearings).
Edit: briefly confused axial with radial load here.
If you fill the section with the shaft coupler with grease you should be fine with only one seal, but safer are two. Someone that already built a dry pod should state his opinion on that.
Regarding the coupler, if you can manage to avoid using one, do it. Maybe a longer motor shaft that you directly mount the prop to. The coupler is a major point of failure. Many can’t withstand the speed and torque so they slip and may lead to the destruction of your unit. Couplers also may introduce wobbling that can destroy the seals.
But in pacificmeisters isnt the part i circled to the right the axial bearing? and the other a ceramic bearing?
My concern is how the axial bearing would hold to the environment if thats the part furthest out.
I did some research on these axial bearings. Do you happen to know how he secured the load side to the outer washer thing?
Because it needs to be fastened to the load side to take the vertical force.
I guess you mean how he secured the shaft to the inner ring of the thrust bearing? I don’t know how he did it, I guess it just fit tightly. If the bearing doesn’t fit by manual force you could try to heat it up and slightly hammer against the inner ring. Then it should sit tight enough. Otherwise a good loctite could be enough. We aren’t talking about crazy amounts of thrust here.
To clear the above up a bit: I somewhat confused axial with radial load for a moment, so the placement of the thrust bearing is not really important and it doesn’t have a real affect on the seals as the shaft doesn’t move much even without axial bearing, it justs wears the other, non-axial bearings. In case of a direct drive you may even get away without any axial bearing at all, as you don’t have a gearbox to destroy. This depends on the bearings inside the motor, deep groove bearing can take axial load as well. The direct drive outrunner designs around here (including my ongoing build) don’t have additional axial bearings.
The main thing that you must achieve is a straight shaft, rotating with no wobbles, Pacificmeister did that using a bearing and relying on the solid type coupling joint.
My first pod was like this, no problems of leakage but the thrust bearing, being the coupling joint fixed onto the gearbox shaft, did not help enough in taking the load. Ended up with destroyed gearbox.
Then, new design with 2 bearings and the classic 2 oilseal with grease in between. New shaft, rather long, made in 2 pieces with keyway slot, able to slide onto the gearbox shaft ending against the thrust bearing. Very smooth but the sfhaft wobbling caused water infiltration thru the oilseals.
It failed, twice.
In your case, you might shape a shaft that ends up with a sort of flange and a thrust bearing, then the output should be coupled to the motor shaft.
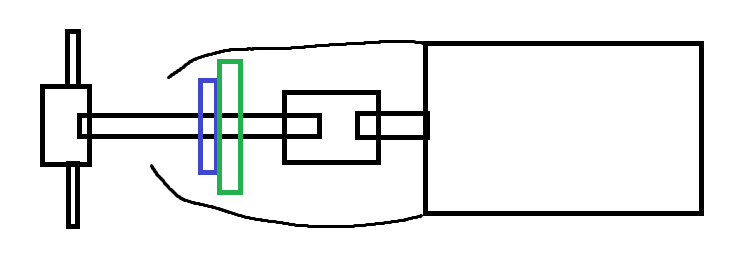
I have seen some designs with a rigid coupler and a thrid bearing like you have drawn it here on the forum. From what I have read those designs did work. But I want to remind you that the bearing setup is overdeterminded this way. In my experience 3 radial bearings (2 in motor, one on rigidly coupled shaft) are bound to wobble. This would at least decrase the performance of your seal. I think those who built it like that got lucky because the housiing was 3d printed and not very rigid.
In theory two bearings on the shaft and a flex coupler would be good. But I have not tested the setup you have drawn above. That‘s why I only want to remind you to think about if a wobble because of the 3 bewrings cold be an issue. Sorry, I know this doesn‘t answer the question.
 . And finally the past week i’ve spent alot of time on here.
. And finally the past week i’ve spent alot of time on here.



 Many thanks for your help much appreciated
Many thanks for your help much appreciated