I am curious to hear what propulsion setups everyone is trying. Here is what I did:
Motor - When I started researching and posted on the electric surfboard forums earlier this year I pretty quickly landed on the SSS 56104 500kv brushless inrunner motor. I am still using the same motor today with a 5:1 planetary reduction gearbox
.
Pros:
Powerfull - up to 14kW peak
Affordable - $150
Fits perfectly into the aluminum pipe I found on Amazon
Cons:
Requires a gearbox. It’s still 500kv and that’s the lowest I found at that time. So unless you are building a jetdrive (which is less efficient), it is spinning too fast for a direct drive at 12S (~50V). Would require a tiny prop and there will be cavitation. One way would be to reduce voltage but I wanted to keep the voltage high to reduce amps and heat. Therefore gearbox.
Takes forever to arrive from China, I think I waited 6 weeks after ordering it on Ebay
Gearbox - would be nice to get rid of it eventually but it will require someone to build a custom motor. I found a Parker PV40TN 7:1 on Amazon for $64 when I started. I stripped the pinion and planets when I had an issue with the electronics. I had sudden cut outs and full throttle accelerations which put too much torque on it (Note for an ESC discussion: we need an ESC with a programmable smooth acceleration curve to protect the gears). I since found a Neugart PLE40 5:1 on Ebay which works great too. Key is to keep the input rpm as low as possible with low kv motors. These things are only rated for like 7000rpm continuous and 180000rpm peak for a short time. So we are stressing the gearboxes and the lifespan is reduced. I read somewhere that ratios of 4:1 and 5:1 are the most robust in single stage planetary gearboxes because of size relation between the pinion and planets, so probably good to stay in that range while we need them.
Prop - Since I am now on a 5:1 gearing I choose a smaller prop than before at about 120 mm diameter. I had success with a 150 and 170 mm on the 7:1 before. But it also depends on the angles and shape. Check the parametric prop in my Fusion 360 CAD files to play with it. I am still playing with it too, lots of room for improvement.
I am using the same SSS motor and 7:1 Parker gearbox though I have yet to test in the water yet. But knowing it worked for @pacificmeister what could go wrong!?
We may want to start different threads for each motor, propeller, impeller, ESC’s? I’m starting two new models that are mini ducted prop and jet drive Jet system is a very different setup from a prop, gearing, and slower RPM. We are designing an affordable VeFoil Motor option that has huge torque, lower 250KV and 360KV for direct drive and jet systems.
@VeFoil I think motor and gearbox (or no gearbox) are closely related. And prop is of course related to speed and torque… but I agree we should start a separate prop tread and many other. I’ll get a prop thread going, IU just took a pic of all my prop experiments.
Currently I am using the same motor with a Parker PV23FE-005 gearbox. This gearbox has a higher torque rating than the PV40 series. Only time will tell if it lasts. I had to grind off the square flange on the face and go with a slightly larger aluminum tube to make this work. I don’t seem to notice any drag difference with the larger diameter tube.
Great. My only concern would be that with a larger tube the SSS doesn’t sit flush in the tube anymore now. The motor will get hot. Maybe build another aluminum sleeve around the motor to connect it with the tube?
Thats what I had to do. Now the gearbox fits snug with direct contact to the aluminum tube and I had to shim the motor with a thick wall piece of aluminum tube to fill up the gap.
Any reason why we can’t use outrunner motors? They definitely have low Kv motors should work without a gear box.
If you aren’t in salt water, you might even skip the watertight tube and just mount the motor to the foil mast. Probably be a good idea to oil the bearings every now and again…
If in salt water, heavy freshwater rinse and oil after every use. I’m sure it is much harder on the motor, but outrunners are much cheaper and you don’t need a gearbox then.
Cheap low kv motors. Maybe need something a bit bigger might be needed but these might do. you are water cooling the motor after all…
hi* hello from ireland, i have started collecting parts,yey* cant wait to be flying, i got a Neugart PLE60 5:1 gearbox on ebay, has anyone tried experimenting with these thruster propellers, link below ( i am trying to work out the best pitch option, does the motor spin clockwise?they give a few options on the link. as i have not ordered it yet, think the SSS 56104 500kv is the one, although i did see a sss 420kv somewhere online…anyway lets get the world flying* thanks guys Keith,
Brushless motors can go either way. You can chnage the direction by changing swapping 2 of the 3 wires going to between the motor and the esc. Or some ESCs can set the direction in software.
We originally used the SSS 56104 but we have ordered two TP-power motors, 440 KV, will test them soon to see how they go with the Seaking ESC.
But to be honest, the best thing would be to construct a Rim driven thruster. And put this on the boards. this way there will be no need for a gearbox, due to the large diameter.
We have started to design one of these, will share some drawings later on. The downside is that its costly to produce the stators holding the copper wires. Could try to 3D print, but I dont think it will last that long.
Over the past couple months or so I have been coming up with a design for my own efoil and came across your great YouTube series about your build @pacificmeister. I have been working to source a gearbox for my motor which is a 800kV motor. I saw that your might be looking to get rid of your 7:1 and it might be a good match for my higher speed motor. let me know if you might be interested in parting ways with your parker gearbox. Thanks for putting this build forum together. It should be some great information as my foil starts to come together!
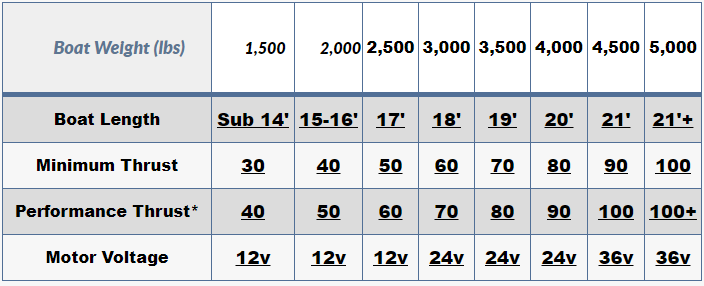
Does anyone know if a trolling motor (with the right trust) would work for an E-Foil? I believe if the nose cone can be cut and bolted onto a foil and the prop is changed to a deeper pitch it should work.
What do you think?
I want to see about having a wired in controller, similar to the JetSurf, so that it cant be lost. all the electrical components should be included. No ESC would be needed I expect only a battery.
I think it may be possible to squeeze it into our current duct walls. But it would require custom stator stacks which is not very affordable on a low volume scale.
Another great thing is that all electronics are permanently seald, so there is no air pockets inside that may be flooded.
The diameter could be 140-150mm, not that large. But it will be as a inrunner with O=150mm in a way.
Sorry @Ctweir but my original Parker 7:1 is toast. Planets and pinion stripped. I think it was totally my fault. After putting the ESC (with receiver) in the back box inside my board it got submerged before lift off. This caused the remote connection to drop and then start again at my throttle pace. The gearbox doesn’t like this jerky on/off. An ESCs that allows to program a smooth acceleration curve would be best. I since extended the antenna to the front of my blue deck pad and that works pretty good.
 .
.