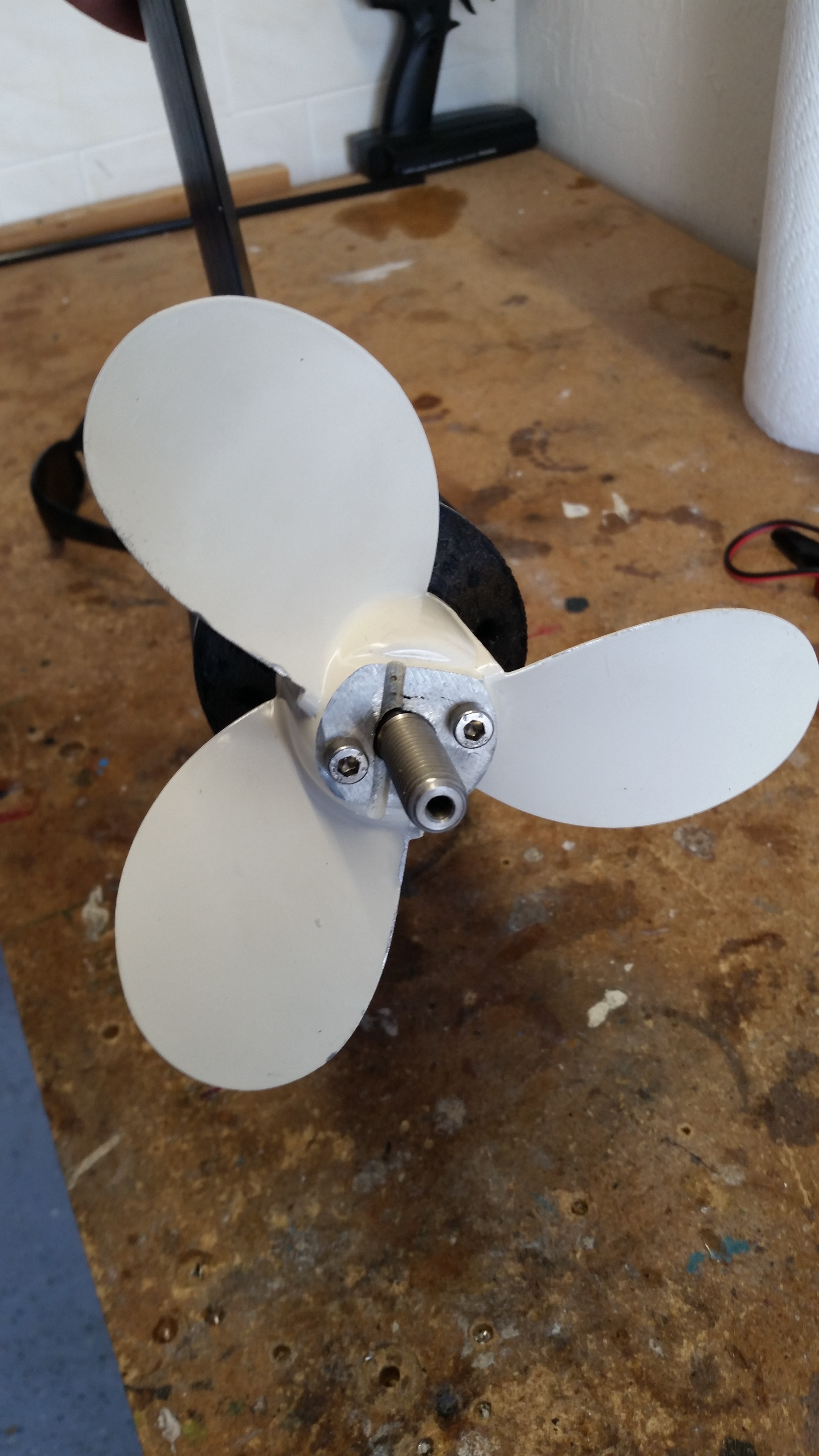
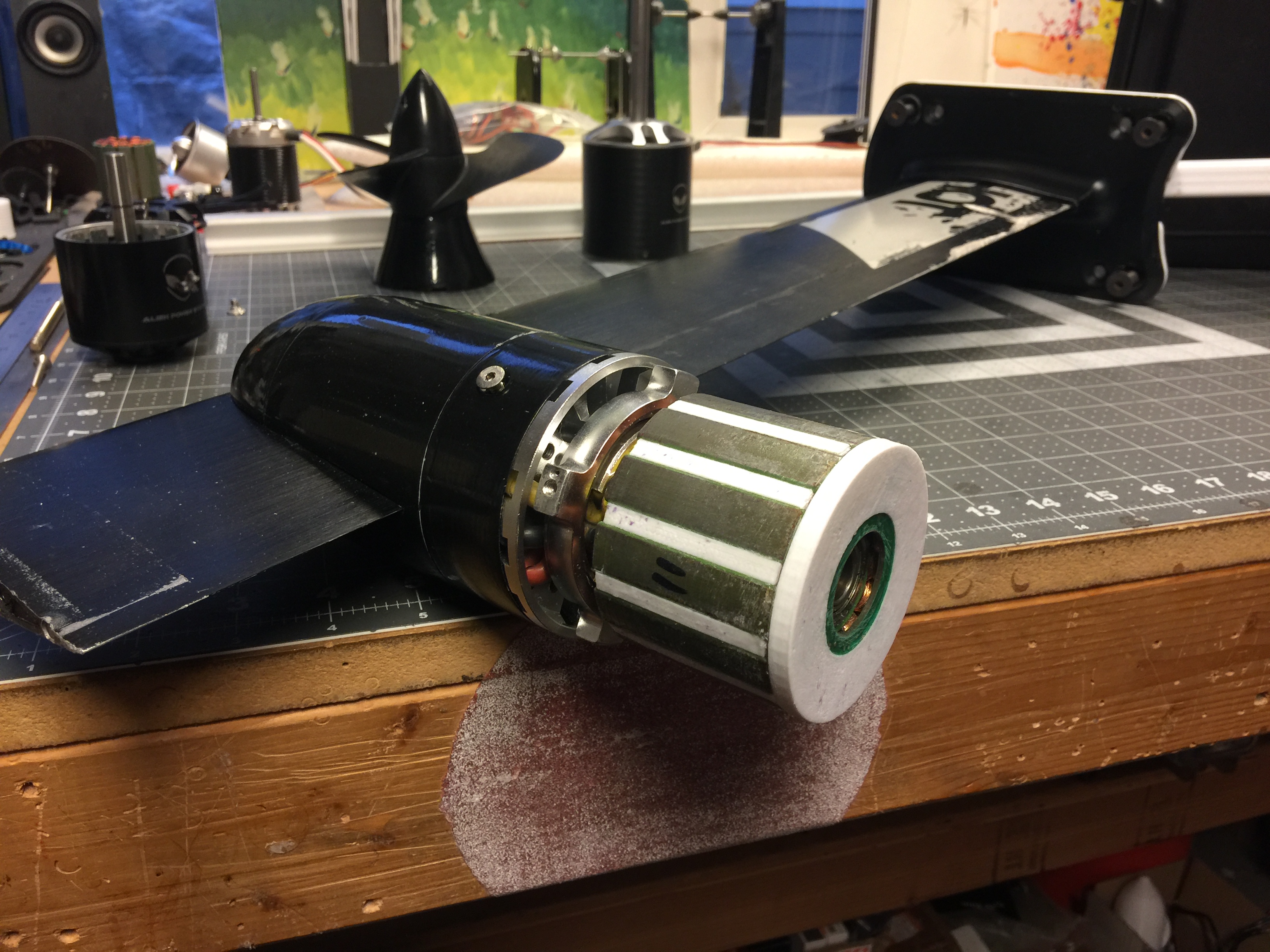
So I ended up ditching the gearbox idea and went very simple as a few have already done. I used an APS 80100 80kv motor (unmodified, no epoxy, etc.) with a castle creation phoenix edge 160 esc. Prop is an aluminum 7 1/4 x5 available on banggoods or ebay. Board is a 7’3" paddle board I had already. Foil is a chinese takuma with a front wing I made.
I want to thank Matt and the others on here who have shared their files and did most of the design work.
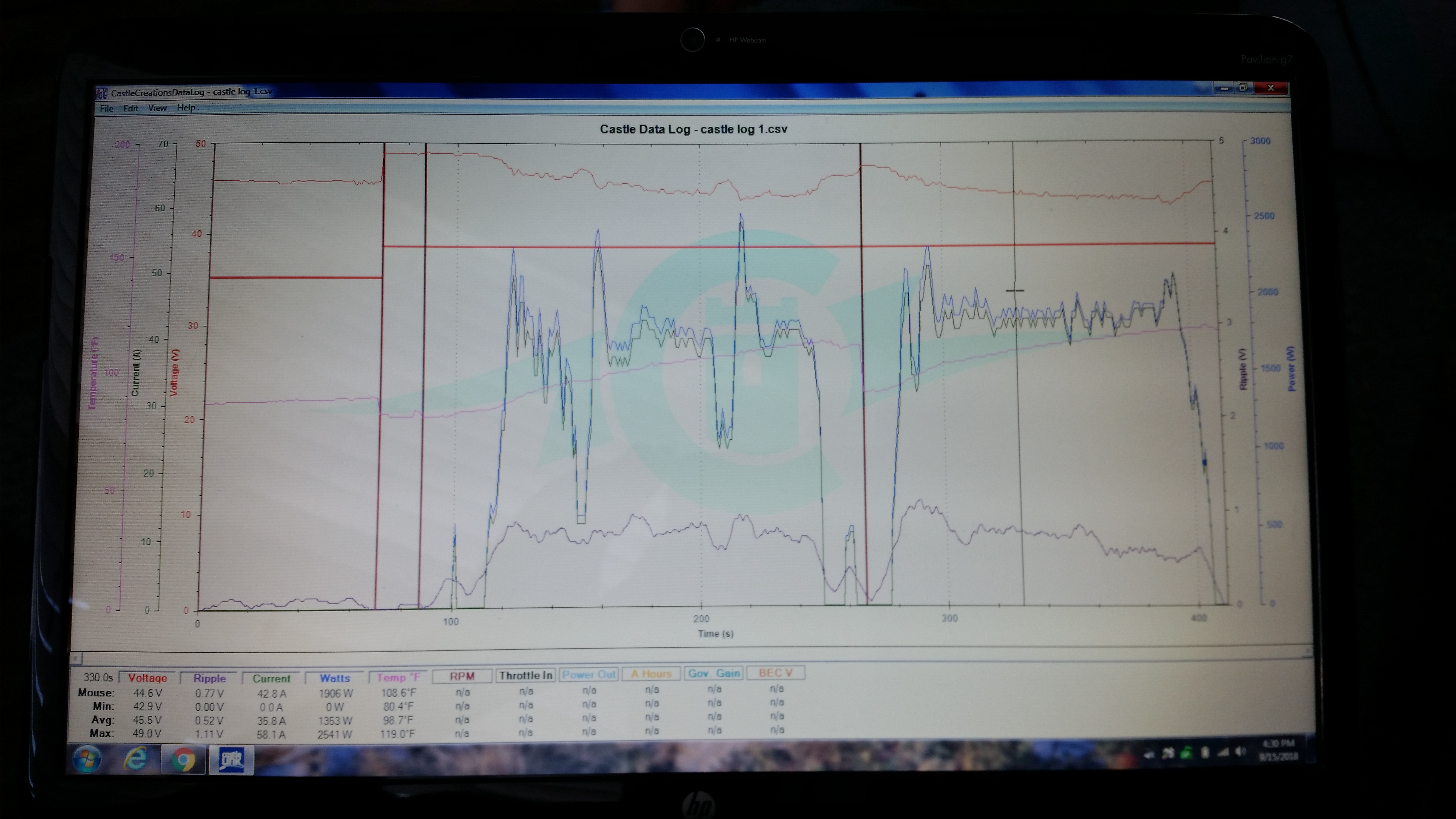
Did a trial run this morning and could not be happier with the power available. I dont think I ever went above half throttle. Seemed to take 51 amps to get on foil and 38-42 amps
Nice job!
I am on the same boat, planned to build a geared propulsion unit for a month and ditched it to order a 80100 80KV for a direct drive.
A few questions:
Do you run it in fresh or sea water?
Do you plan to seal the motor in the future?
Do you do anything else against corrosion?
Does your ESC have current limiting? I would otherwise be a bit worried to blow it if you get seaweed stuck in the prop or similar.
Keep us updated!
I currently run in seawater. I submerged the motor in corrosion x before riding. After riding I flushed with fresh water and soaked again in corrosion x. Only time will tell how long the motor and bearings will hold up. My ESC does have current limiting. I have no plan to seal the motor. I did purchase a 70110 sealed motor from APS I might try in the future. My thought was if I could get 6 months of use out of it I would be willing to buy another motor if needed. I will also shorten the shaft once I try a few different props.
Fantastic job on the board and foil wing! They really look great! This takes using the KISS principle to the max! I’m interested to see the longevity of the motor, but I suspect it should last quite some time.
What would be interesting is to see how long the bearings will hold up without a thrust bearing.
I did the same thing Matt did. I machined down the hub slightly until it was flat and then drilled it for two bolts. The two bolts thread into the rotor on the motor.
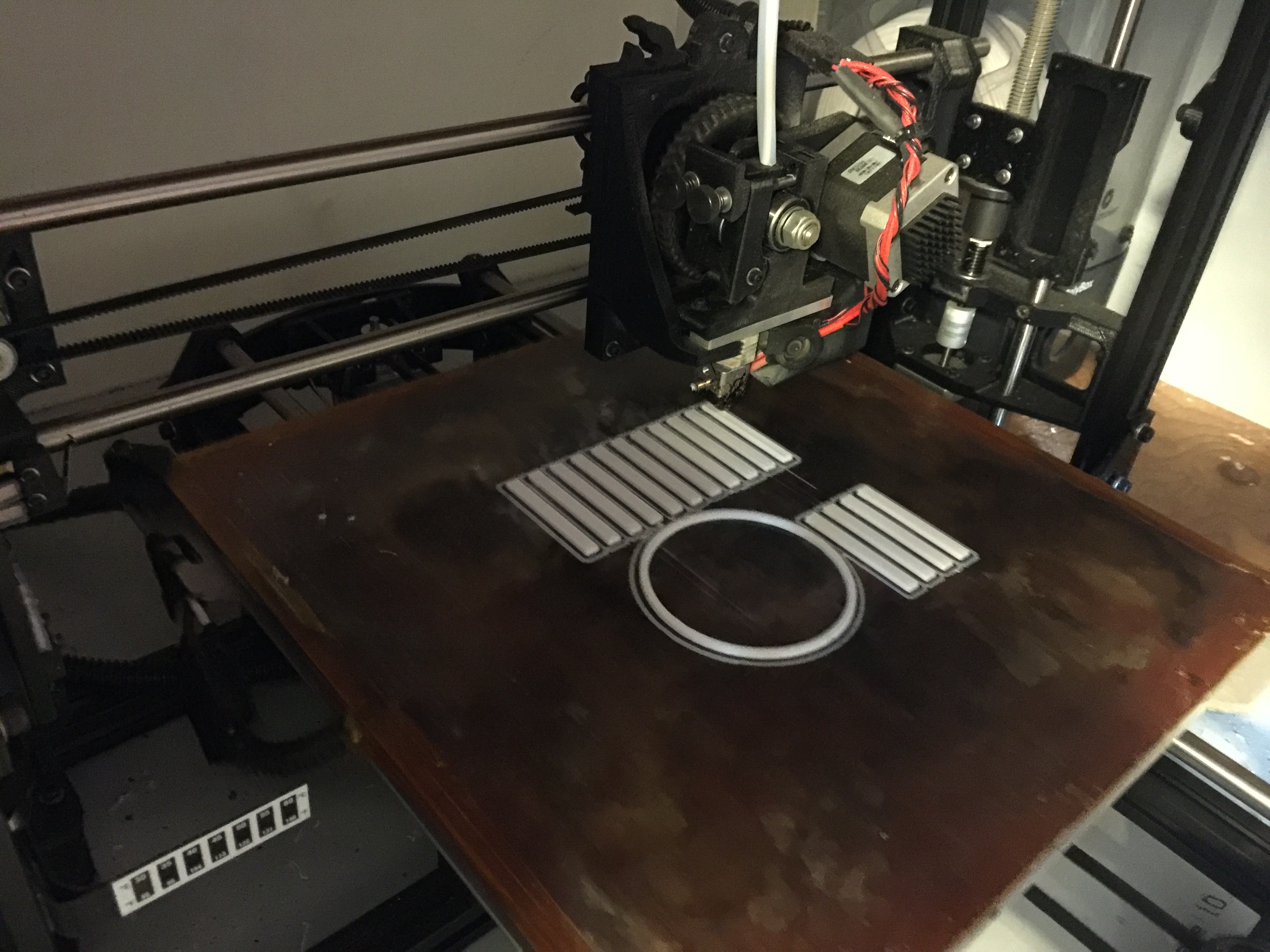
Yes, do it! Print these and glue them in with epoxy. As they are kept cool by water, nothing will happen. I used to spin the rotor to form the ring, like i learned to cast bearings. I also tried your way in the past, and it also works, being less uniform, but ok.
I also had to machine the epoxy cast ring on a lathe. If you can avoid this, great! If you see, that the printed elements are too large, do not treat them individually by cutting, print them once more, so you preserve the benefits from 3D printing fully, the repeatability.
Good luck!
I’ve built, rewound and seen a couple motor designs but never has anyone tried to secure magnets to the flux ring with indoor only rated construction adhesive.
Leaving it open for cooling…but I’m really not happy with this half cowl design. The big bearing spacer should be re-machined (filling it would be a pain…).
I’ll try to get some current plots as is after work…
Sensors unused… sensors really shine when U have traction or when there is a need to get close to Stator saturation limits where we loose sync due to noisy back emf. For our application there useless.
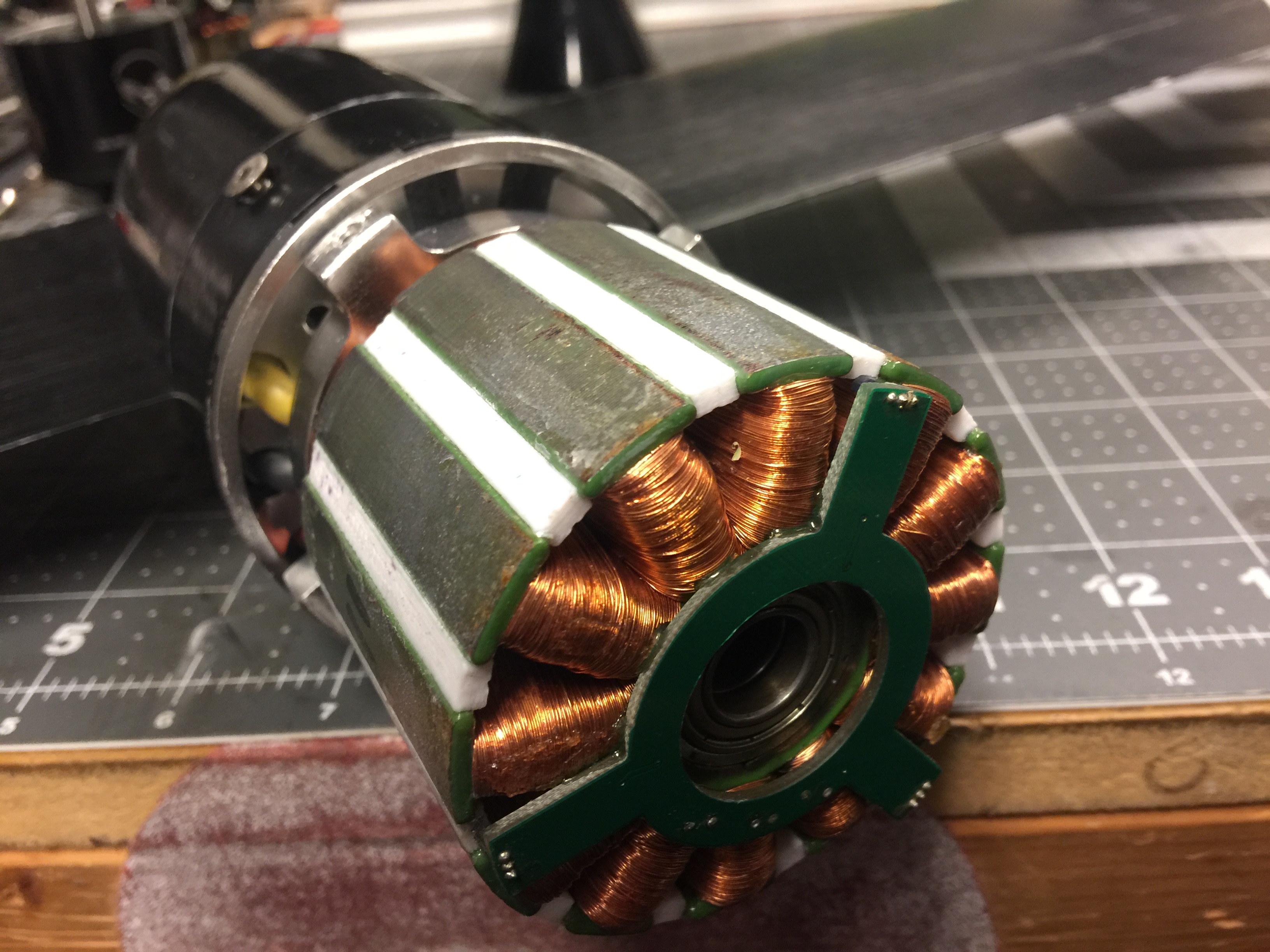
The motor package (80100) @ 50 or 80Kv air cooled is nonsense. The low kv wind is making the individual windings super tiny for the big motor.
Do not do this. It was a misunderstanding. I thought you want to print these blocks to cover the spacing between the magnets. But you covered the stator with them. I have done this with a 6374 motor and it burned. You need some water flow through the winding spacing, otherwise you have no benefit from the water cooling. Maybe it works with a 80100, but for sure this is not the optimal cooling.