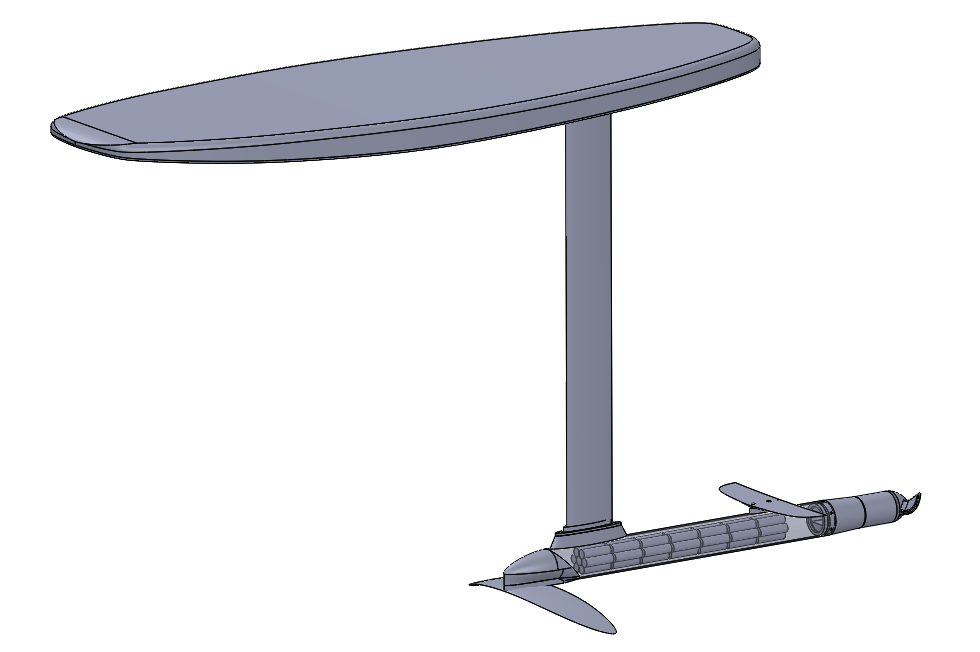
I wanted to make a propulsion system that can be attached and detached from my kitefoil board. The goal was to have everything just screw-on and no drilling, cutting etc. This is what I came up with:

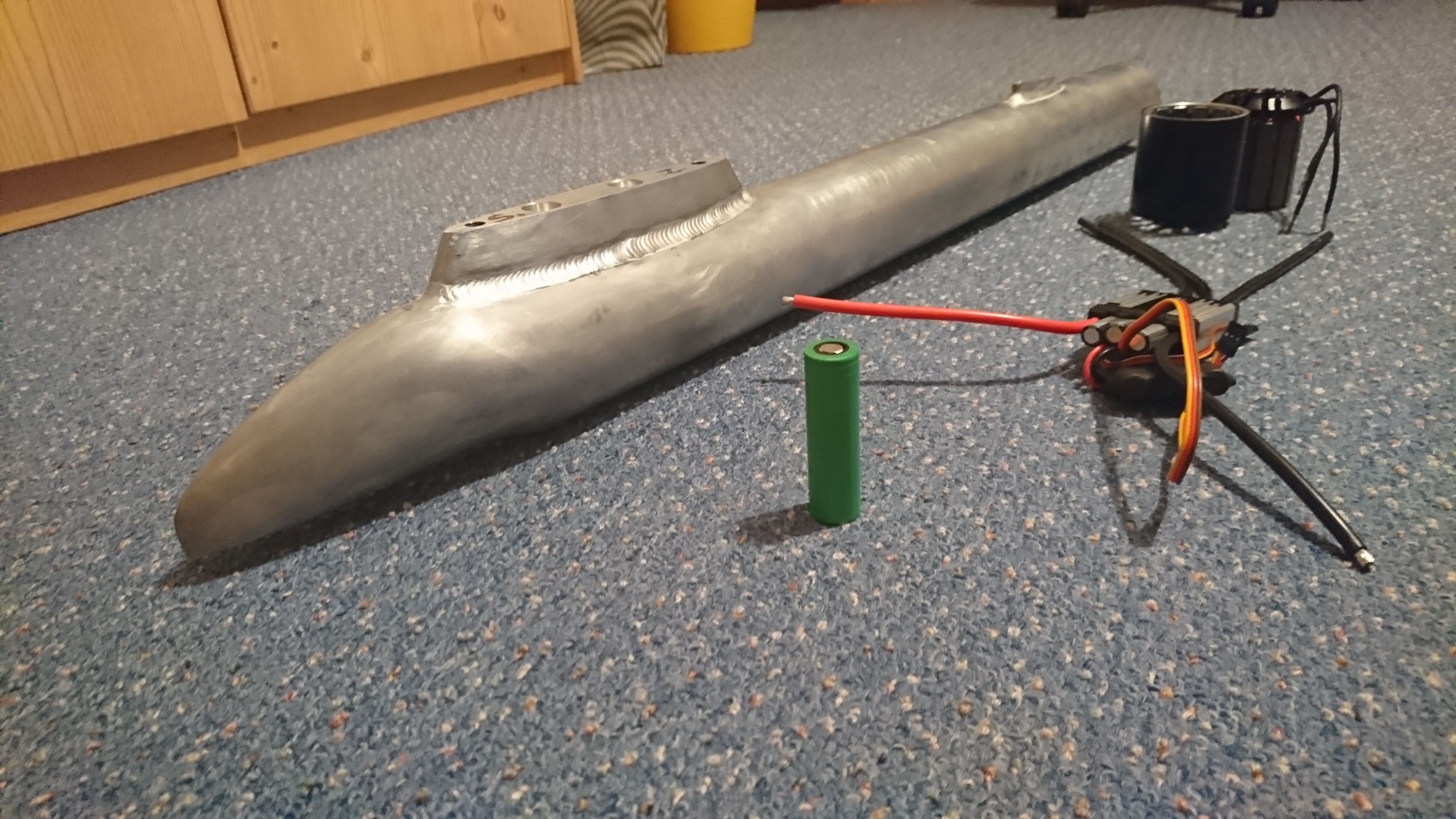
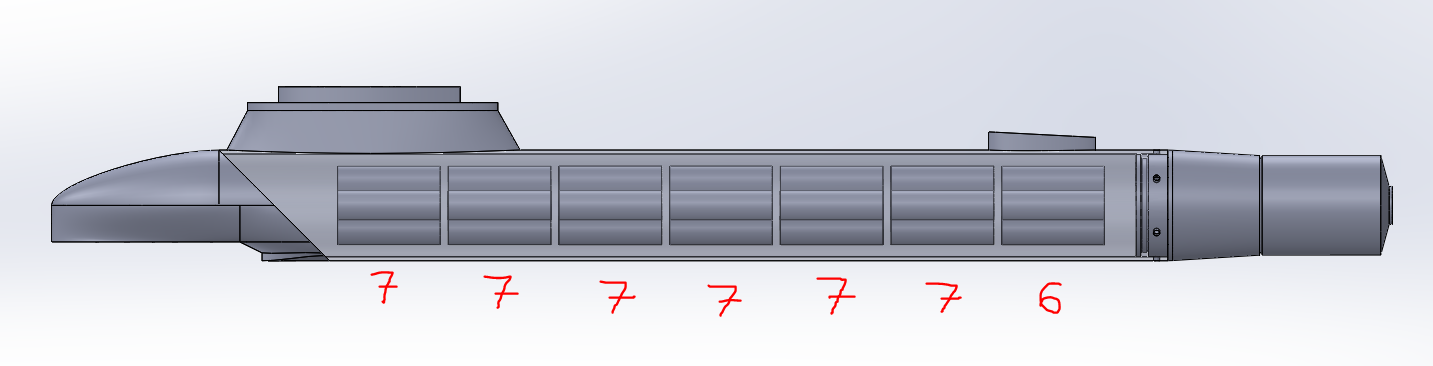
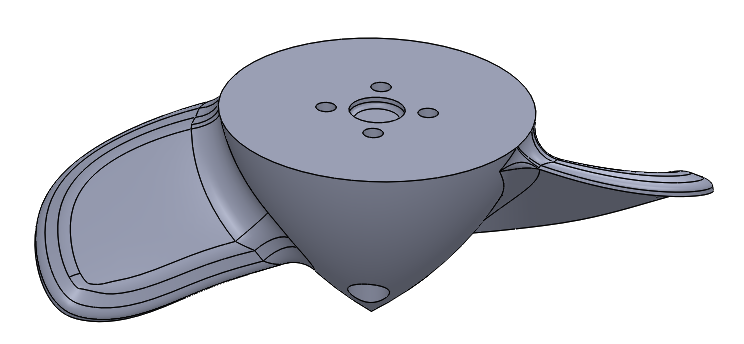
The hull was made from aluminum in a workshop by my grandfather. I gave him some drawings and material. Here the CAD picture (the pipe is transparent):


The components were afterward welded and painted.
The motor is APS 6384N 100KV 4000W PowerGlider:
I was reading the thread in direct drive outrunners and was amazed by PowerGliders idea to epoxy the stator and rotor and have it submerged under water. First I tried a smaller motor just for testing this concept and it worked fine. The losses are noticeable but not dramatic. I bought the motor and added stainless bearings since the motor will be under water. I used very similar epoxy that is used for making epoxy tables.
http://www.samson-kamnik.si/en/vista---transparent-uv-stable-molding-resin

For the ESC I used AeroStar Advance 150A 12S.
I mounted it inside the motor mount and it had metal to metal contact with thermal paste for great cooling. The first ESC died for no reason one time I plugged in the battery… I didn’t have any problems with the second one and it worked great every time.
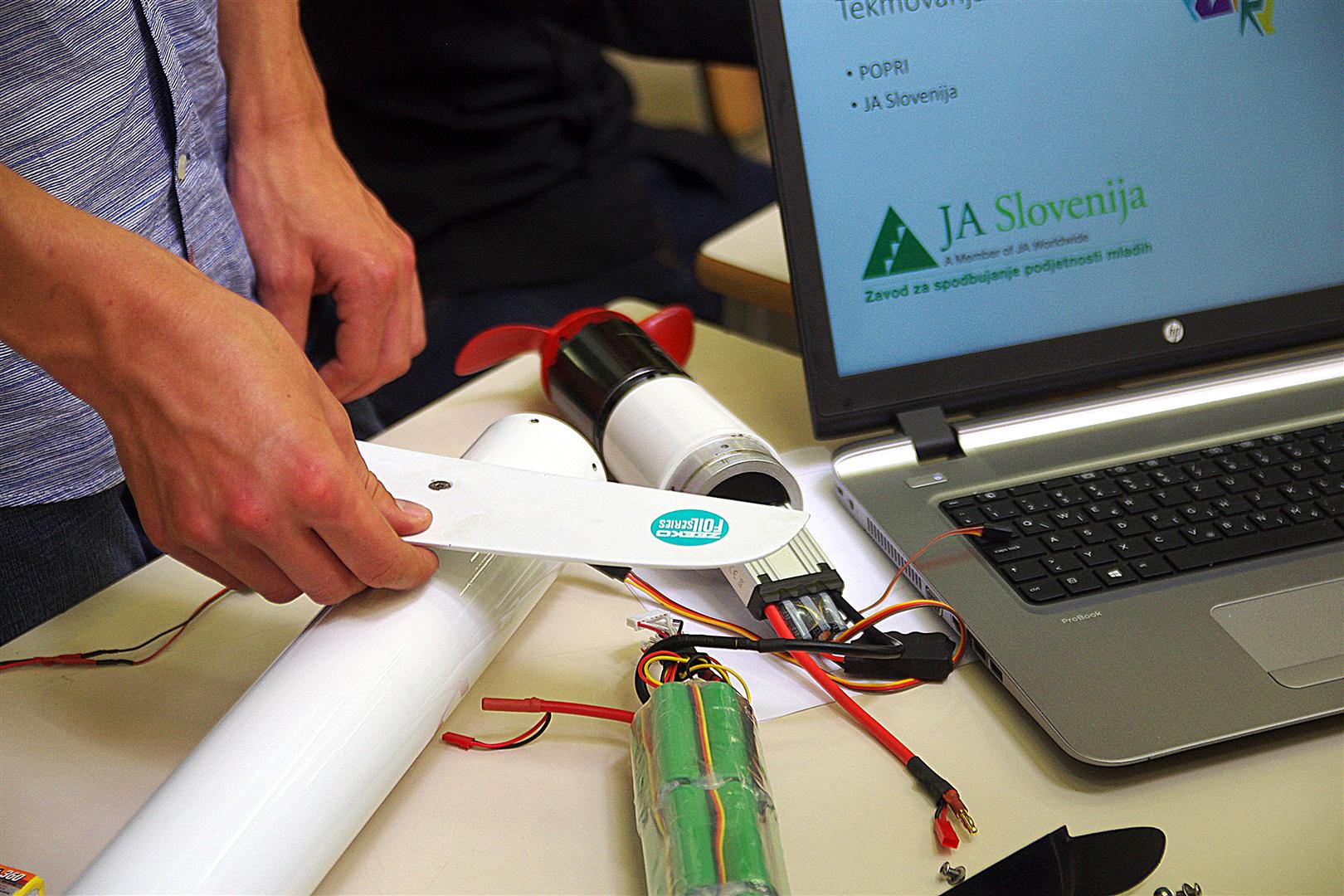
For the battery, I used 18650 Sony VTC6 cells and connected them in 12S4P. I got 48V and 12000mAh, so that means 576Wh. I know that many of you will say they don’t support enough current and you are right, they shouldn’t, but…
I welded them in a hexagonal shape, so they fit inside the pipe. I added two layers of shrink tube for structural integrity. Turns out it completely prevents cooling, so I cut some holes in the shrink tube (and it still overheats).
I designed the propeller with a help of a professional who is by the way in charge of the production of JetSurfs. He asked me about the motor specs and gave me the diameter and pitch.
Diameter=130mm
Pitch=180mm
Did I mention the part about JetSurfs? He gave me numbers for ‘‘sport’’ version without me knowing.
So I 3D printed it, filled the spinner with epoxy and reinforced it with carbon fiber. I made a small mistake when I was drawing holes for mounting to the motor. The holes are to close together and of course don’t fit… My grandfather made a chrome adapter, so now is just not so good looking but still functional. (Red propeller is just for looking and has no practical use)


One more thing. For control, I used quanum pistol, but it turns out 2,4GHz doesn’t work underwater. I added an antenna extension and I ran it from the hull through the mast and to the tip of the surfboard. At the beginning I had it only in the mast, but it didn’t work great.
Also, I took the remote apart and added some rubber bands on the trigger because at the beginning it didn’t give me the proper control. I suggest it to everyone with this remote.
So the tests… First thing I immediately realized that a small board presents quite an issue. You have to start lying down and then get on your knees. Getting on your feet is a major challenge. Then I noticed that sport propeller and lack of control in my remote gave me no control over the throttle. So it was pretty much full throttle all the time. One time I took my phone with me and measured the top speed of 40km/h. I also bought EagleTree sensors for current and voltage. At full throttle, the current was 110A (27,5A per cell) and the voltage had a massive drop from 50V to 40V. When I was going fast the current dropped to 80A. Pretty much all the tests were lasting for about 5mins before something overheated (usually battery to ESC or ESC to motor connections). Battery got to about 20% so maybe a minute or two more…



Here I have some random photos:

Lessons to take:
-Bigger board
-Bigger battery and better cooling
-Motor with less KV
-Bigger cables between the battery, ESC and motor
-Prop with smaller pitch and bigger diameter
-Heavier trigger on remote



 The speed issue can be addressed by a lower pitch prop.
The speed issue can be addressed by a lower pitch prop.