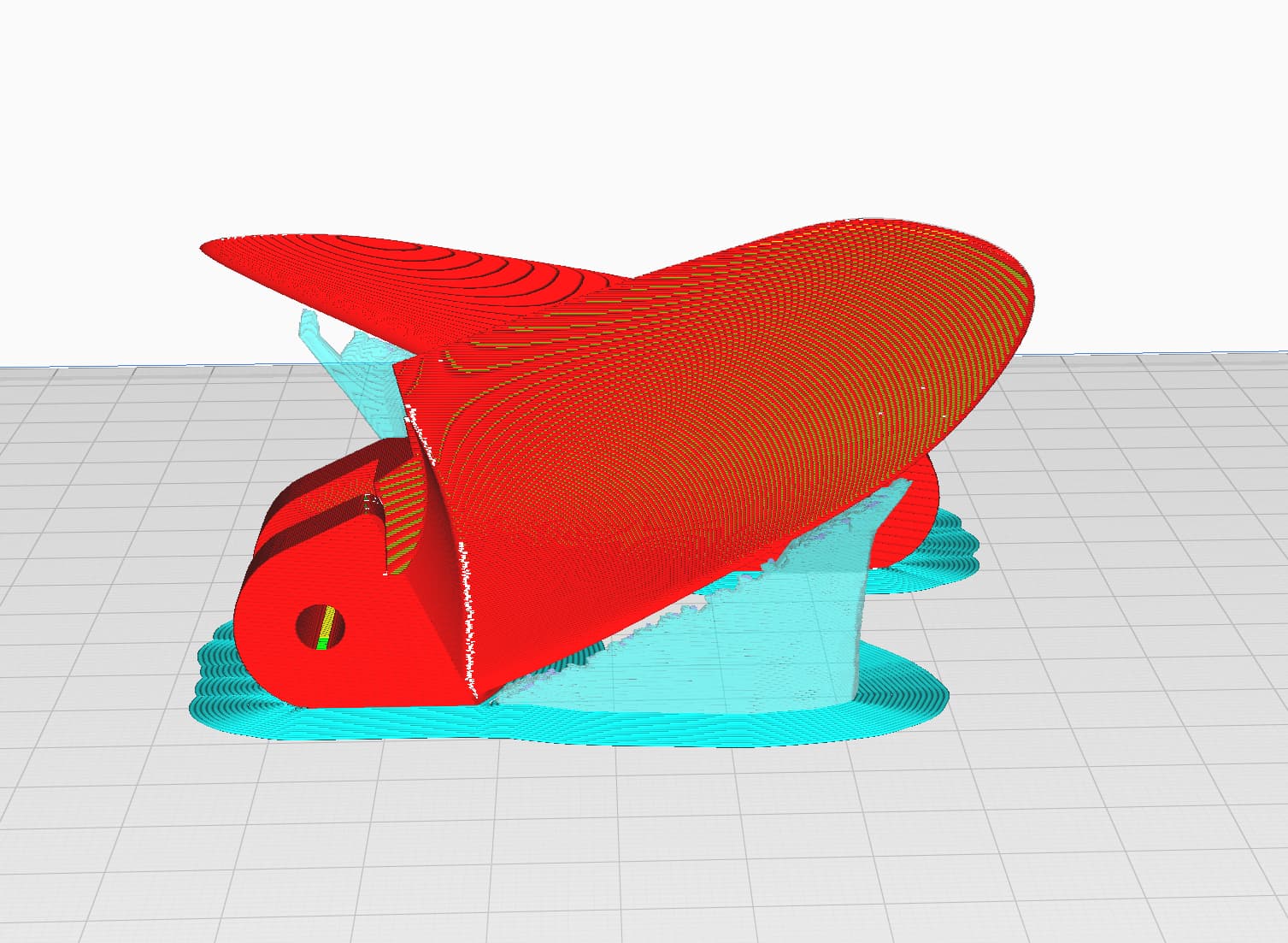
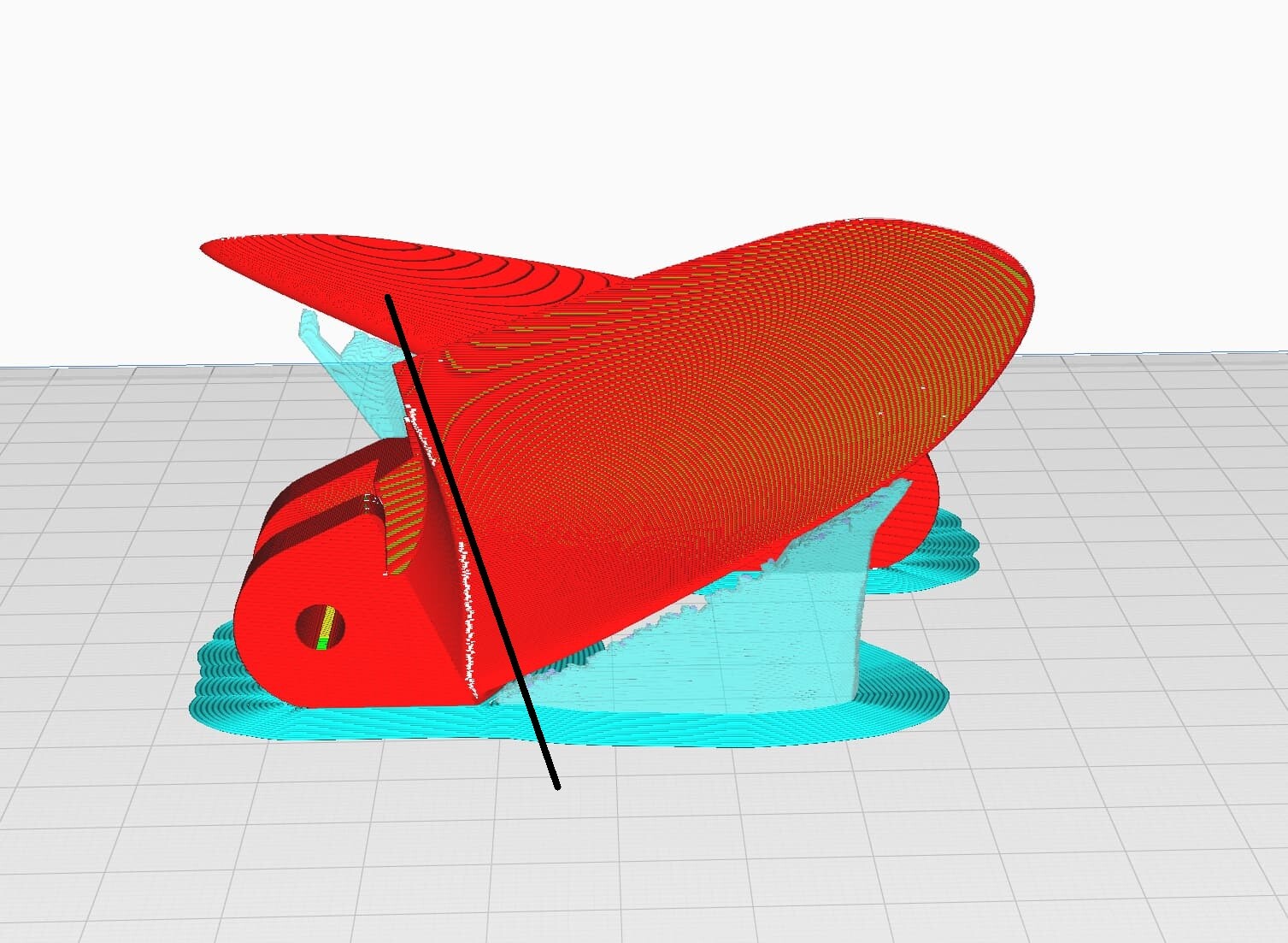
Printed it like this with 6 top/bottom and 6 perimeter layers in esun PLA+, support overhang angle 65° (no support under the propeller blade). I had to offset and rotate:
Z offset 310.6
X rotation 90
y rotation 176
z rotation -26
Thanks michael and sat_be, both look like reasonable ways to print it. 6 walls/top/bottom seems a good idea.
Is KlapppropV4 the updated/fixed STL file, in a previous post above?
I’ve been sent a higher kV motor than I ordered (6374 170kV arrived, instead of 6384 120kV), so it’s going to be spinning at a faster RPM than I wanted. It’ll be with a 6s battery, for a foil drive, so I’m after efficiency with low speed push.
Hi Achim I really like your build. Simple effective cool. Above all with a screwdriverpack as a battery. Wow.
Especially the folding propeller looks great for me, as like you, I want to cruise on our channel in front of the house and also hope to chase waves in the nearby sea, which most probably will be fantastic with your folding prop. Looking around I noticed that some people also took the 63100 because it’s a bit stronger, but I also like your setup because it’s a bit lighter which might be an advantage in the waves. Therefore my first question :
I weigh around 80 kg included my neoprene and my hipe 5.5 is a little bit heavier than yours. are you in the same weight range that It would be safe to assume the setup also works for me?
Which vesc do you actually have there?
Is it actually the motor that determines the choice for the vesc size or the battery?
Which manipulations did you actually make on your motor ? There seems to be a new model , “battle hardened”, at Flipsky that I ask myself If it would maybe be ok to take it as it is, without adding epoxy and change bearings.
i weight around 70kg. But the System has plenty of thrust so i think it could handle your 80kg.
But the folding prop is actually not really reliable so i would not going out in the wafes with it.
But i have several plans how to improve that. I hope i have a reliable version till beginning of summer.
Great , thanks a lot Michael, the vesc is actually a great tip for this price! As for the prop I can go for the Normal version for the beginning.
But just to know, in wich way is the folding prop unreliable? It sometimes does not unfold?
So my investigations about the failure mechanism are right now:
The opening shock when turn up fast (Current controlled VESC) is way to hard.
I Already tried to make it with 100% Infill, it makes it even worse. Because the opening shock on a stiff part is even more stress for the material.
So the my current work is to develop a 2 phase opening of the Prop. Version 4.1 becomes a TPU printed dampening system to reduce the opening shock massively. I already did some dry tests. and it seems to work: https://youtu.be/szalWEe53GM
take a look to the gap between the base and the blades. Initially the Blades crash against the TPU dampers. And then at full speed/ Watertrust the blades going to press the dampers together and unfold completely. I am going to make now some Watertests and when the system survives some hours. you get the files for mass testing
I’m going to try PLA-ST as it is supposed to be 10x as impact tough, compared to PETG or PLA.
A dampening block seems a great idea, with some sort of high density polymer.
Does your ESC regulate on rpm or on current.
→ mine is on current and thats pretty stupid when i start thinking about it. Because the acceleration and the opening shock is pretty hard.
Vesc user , you can choose to run duty or current mode , you can set the slope of the throttle curve , you can play on the ramping time to add some delay to smooth thing … you can do a lot …
But no there is not a smooth start option in that case , you need to adjust thing in condition ( speed …)
You can only smooth the throttle by adding some play and or time , and my guess is that you will have more control over this on duty control ( rpm) vs current mode ( torque)
We will need a 3D mapping including rpm/current/throttle …
Til now i dont had any problems with it. 13S also works perfect for me.
The only thing i am a bit confused about is the high Temperature.
It still reaches 65°C in an ambient temperature of <10°C with the giant cooler. So i am wondering if this still works in an warmer Ambient temperature .
To switch the Boxes i use a watertight 3 pole plug outside of the box. This works great till now.
My 8364 got also the final bearing update. Like some others i am using the BB6800B18030GL and BB6900B18030GL from Igus for the radial bearing. But i used a H370FM101207 Plain bearing for the thrusterbearing. With a polished and reamered Steelwasher on the rotor side.
All my delta measurements till now show no measurable difference in powerconsumtion!
It works perfectly!
I also made several new Tests with the folding prop. But even the SLA parts could not resist the opening shock of the current regulated start. So i propably gonna try out a much stronger material.
The temperature of the vesc doesn’t sound ideal. I’ll be running continuous 20-30A in 30 deg C ambient. The makerx 75 / 300 vesc I’m using at the moment seems to get to about 70+ degrees, with only passive cooling inside the pelican.
How watertight is your heatsink on the outside (also on Alexandre’s build)?
Did you change the vesc to run with rpm control, rather than current, to save the props?
Got finaly a new working version of the Folding Prop. I tried a lot of different things. Here is the final changelog:
completly redesigned the blades to reduce mechanical weakpoints
also finetuned the tolerances to reduce sanding to ~1 minute
added a TPU 95A damping system
raised the printing temerature of PETG to 250°C for better layer adhesion
printed with 0.1 layers, 4mm walls and 40% cubic infill. No Support for the Blades with dual blowersystems
after sanding everything i mount the blades in the base and paint a thin layer of 5 min Epoxy on the blades (every part that gets not in contact with the base)
then sanded down the blades just a little bit to get a better surface.
Set my VESC to current controll with 4s delay in powerup.
This works just amazing for me till now. Its completly reliable for 4-5h till now.
Lets see how long this lasts but looks promising.
 .
.