Dear builders
We would like to contribute to this awesome new sport and DIY projects! We are three brothers from Norway, one eye-doctor and two mechanical engineers, we also get help from some of our very talented friends that are into electronics and programming.
We decided to make a thread where we will show different aspects of our build and how we solved challenges we came across (Cooling ESC, Gearbox, Waterproofing, Mast mount, Duct, Controller, propellers etc). Hopefully both you and we will learn from this. We will also answer questions related to our approach as best we can to guide other builders to their own flying watercraft. If you have a question, please add a picture to describe your question (you can take pictures from our facebook album, this way we can answer more precise).
We have been documenting our journey on a Facebook album.
We have also published an instructable, with all you need for our V1 propulsion unit. Our v1 is still working well, we still ride it!
Our Bluetooth remote is now up and working, and we will soon be publishing to this thread, with code and stl´s for 3d printing. Note that these files and/or information are not intended for commercial use and should not be sold to a third party as “your/our” information!!!
We get many inquiries about getting/buying our latest files, we have decided not to share these. They are milled hence not ideal for DIY building. We also belive that people will be much more excited with the building if they implement their own design changes, which in our heads is the best part of this new sport/ DIY project!
We are also looking into building a commercial board and/or a DIY kit for people without workshops (if there is sufficient demand for this. let us know).
To kick off the discussion Here is a few pictures and video of how we did some of our challenges.
The esc is placed inside a fireproof aluminium box from RS-components, that also act as a passive heatsink(together with be compartment lid, which is also aluminium). Silicone tubes are used to pump water through the ESC.
ESC box inside the board. With the cooling pump (self priming). The water is pulled through the mast and into the pump and through the esc and out.
Mast mount, is done with threaded rods that are glued in and reinforcements on each side of the board. Does not look too good, but its cheap and super sturdy.

The board compartment is build in a old windsurf Board. 3 layers of fiberglass was vacuume bagged onto the board to strengthen the compartment. Several snowboard inserts is used to make the lid, combined with a EPDM foam seal makes a waterproof compartment.

Comparison of Propulsion unit v1 and v2.

Board with perfect background

Sunset foiling
Videos:


CHEERS ![]()
![]()
 (says the boss)
(says the boss)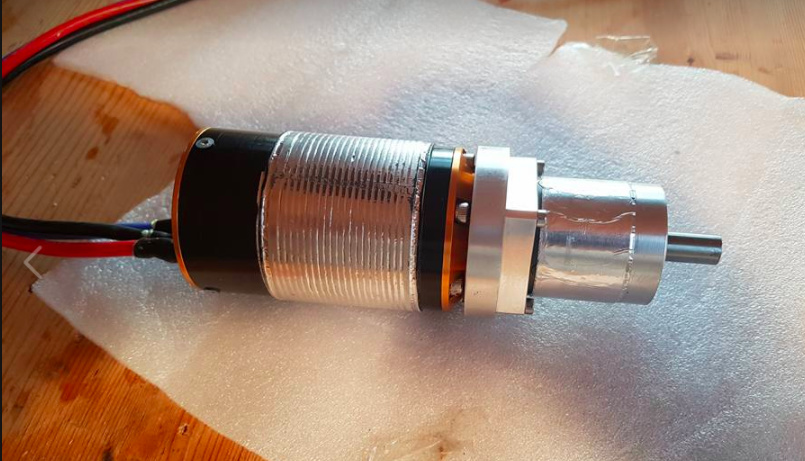
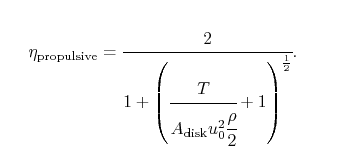
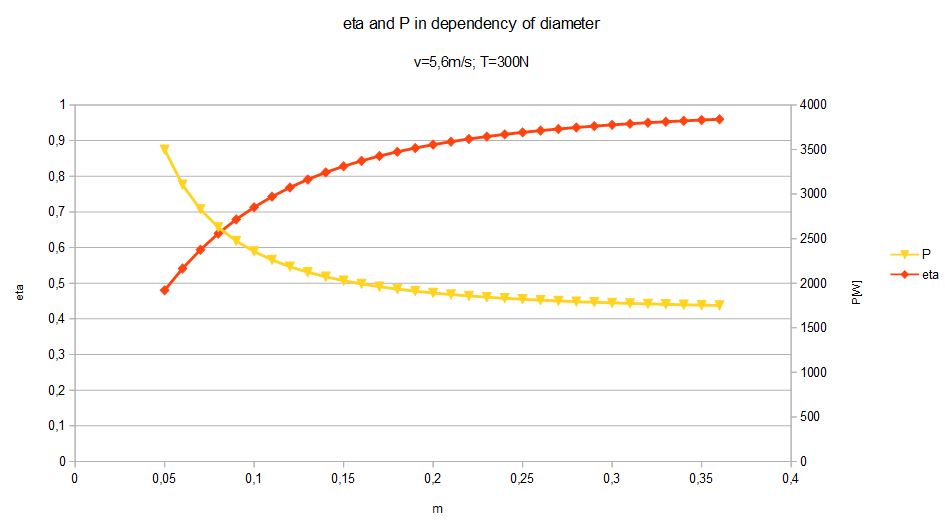
 . But there may still be a gain in efficiency.
. But there may still be a gain in efficiency.
 The aluminium casing is 92mm long and Ø58mm if that helps.
The aluminium casing is 92mm long and Ø58mm if that helps.
