This thread is for us to discuss the general electronics required for building a DIY tow boogie. There are some great designs on this forum and some excellent contributors who have helped so many of us with our foil drives. This is the next step for me. Maybe you are thinking about it too.
We now have a dedicated design thread based on the shape and layout of the tow boogie.
The most expensive part of this project is the battery so I thought it makes sense to have a generic electronics thread where we can share best practise for the ESC’s, the motors, the battery, waterproof battery box etc.
My first question to get started is around capacity. How big do we need the battery to be and how much run time does it give? I have seen quite a variation in sizes on peoples build threads so I would love to hear what people have had success with.
I use 2 Flycolor X Cross 160 amp ESC’s , there are same ESC with better cases by Flipsky or Flycolor X Cross Pro but more expensive. BL heli software is very good to use and not so complicated compared to VESC in my opinion. Less options for sure !
2 BEC’s to have no Bec conflict, IMPORTANT ! Otherwise I was loosing one motor after 10 sec with one BEC.
2 Ali 150kV epoxy potted motors
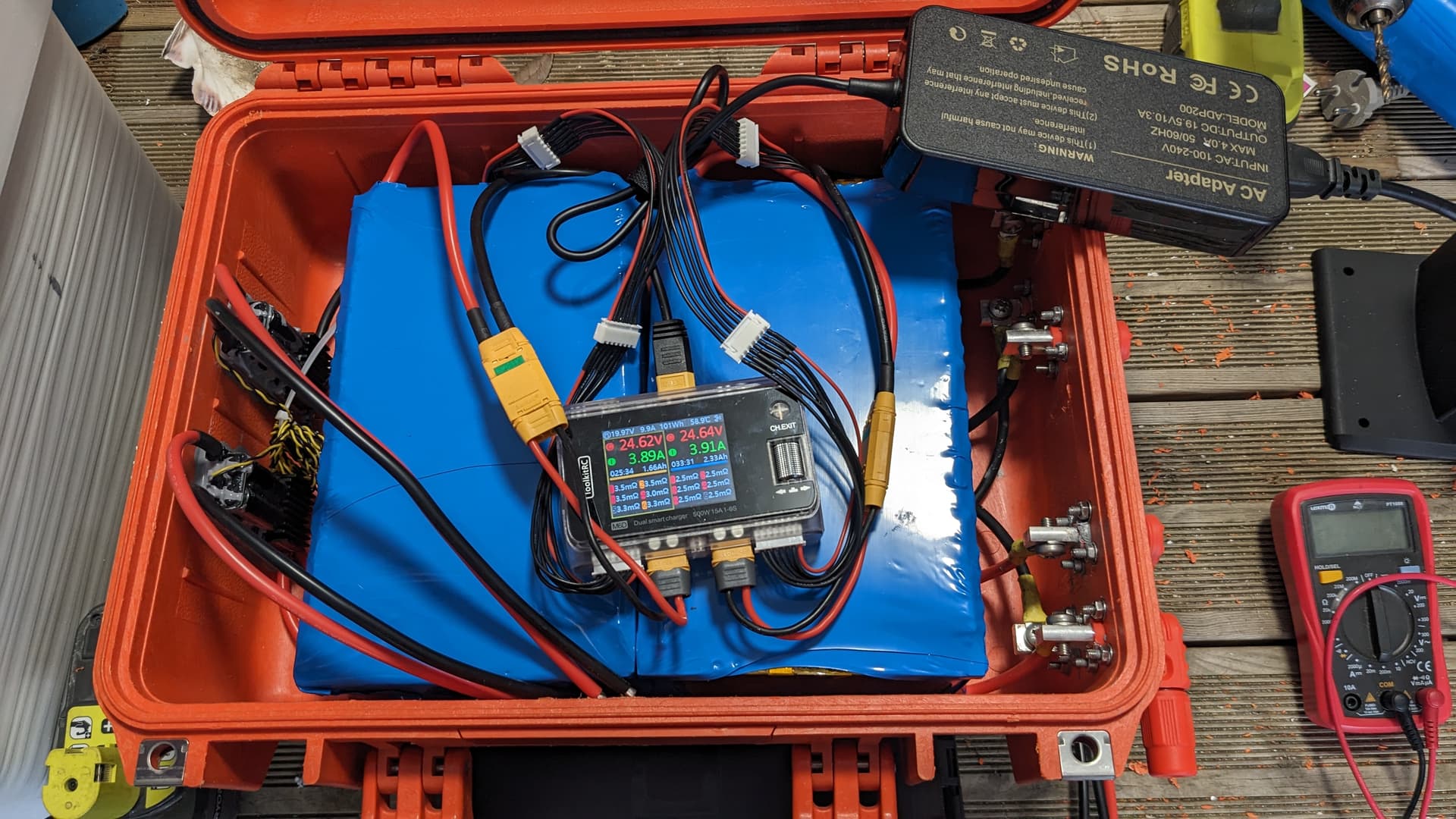
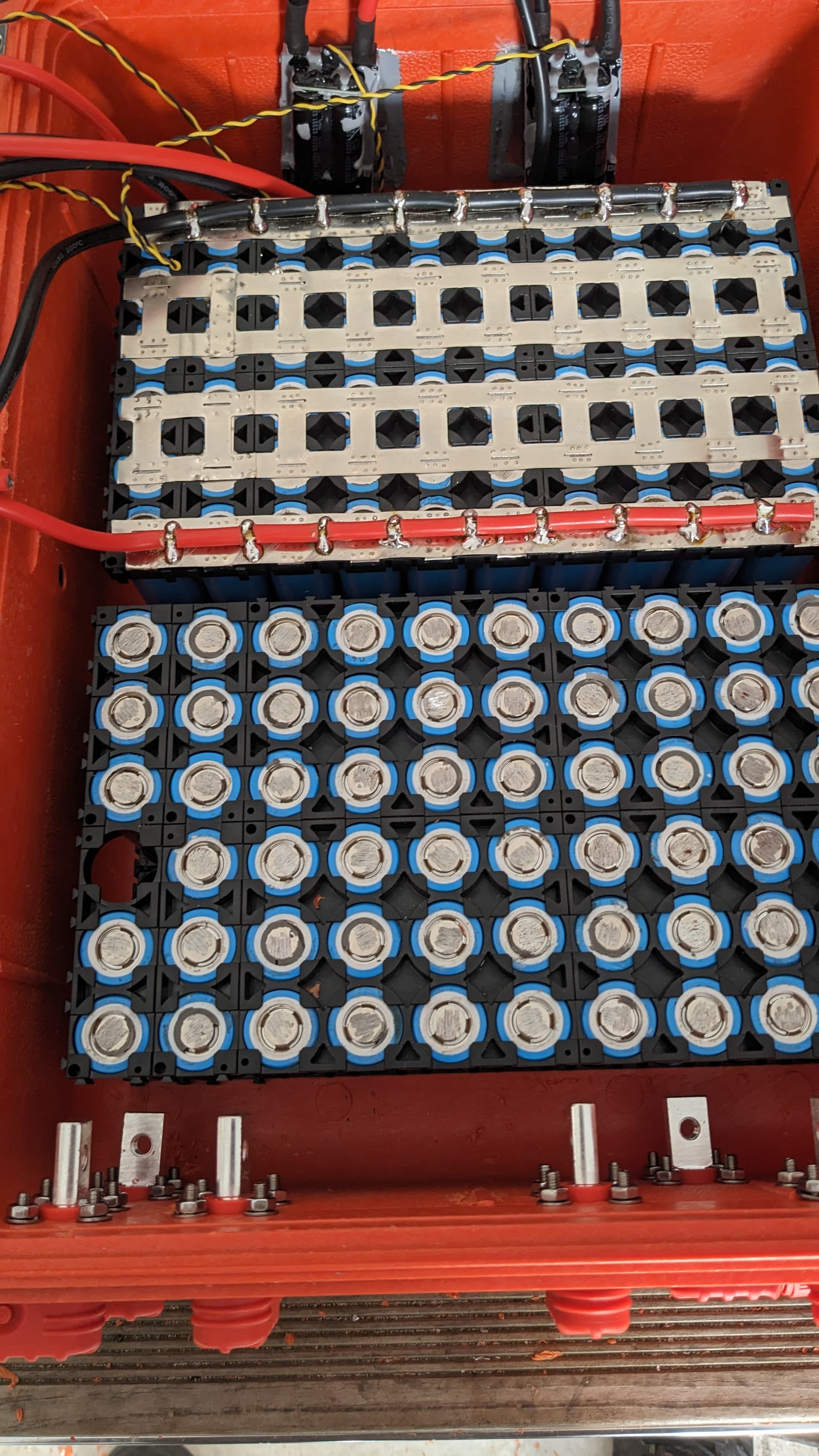
And 2 x 6S10P in serie with Samsung 50E. I was doubting about this cell amp capacity but with 10p, the pack can send 100amp and it works for the moment. No excess of heat on ESC and battery. I built it at home with 0.2 mm nickel stripes and AliExpress cell holder,
Bremote obviously for dual motor differential steering
Everything is packed in a Pelican Case, nothing is waterproofed. I already had an issue with water leak so I protected a bit more the ESC with Sikaflex and use a dedicated strap to force the Pelicase closing. And the battery is based on a high baseplate to avoid swimming
About runtime, I didn’t go until the end for the moment, but 45 min was 50% if the battery in my trial. No BMS, I use my Foil Assist cheap M6D charger
Thanks for the information. That was really useful. The expense of the battery is big so I need to make sure I get that right. The small leak must have been a worry. Are you going to protect the battery inside going forward? Perhaps in a sealed / glued polycarbonate box ?
I have two batteries using cheap high current Lishen 21700 cells in a 12s7p and 12s8p configuration. I don’t use BMS. The chargers are EV-Peak A9 and iCharger X12. I use two pairs of controllers: ESC FATJAY 200A and VESC Makerbase 75200. One BEC - 15A ZMR BEC. Case - Pelican 1500, connectors - modified Cnlinko. At first I used Maytech remotes, but after Flipsky started installing bright screens, I switched to these and find the range much better. I’m planning to switch to Bremote, I made my own body, but haven’t found the time to waterproof it. Fundamentally, I don’t want to fill it with foam, but to fill it with silicone, I need to change the body a little, I hope everything will work out in the near future. Riding time depends on the style and type of wing - on average, from an hour to two on each battery.
For the moment I stay with a non protected battery, I bought an original new Pelican case gasket , I installed a dedicated strap to force the case closing and my battery is locked on a high foundation to avoid swimming in the water, I will add some sponge under this foundation for safety also.
For info, there is a water sensor provided with Bremote
As batteries are well locked with straps on foundation, I don’t add any foam in the case like a lot of people do because I prefer to have good air circulation inside.
Yes, halyard control, but big motors are not very good for a bodyboard. You can turn only by releasing the gas, the masts need to be replaced with aluminum ones; printed ones are not suitable due to strong vibrations, and the motors themselves should be lowered lower and moved closer to the center.
Hi. Setup sounds good. Im also building a battery with aliexpress battery holders. Did you any extra insulators on top of each cell or does the plastic cell holder keep the nickel strips aff the negative outer shell when spot welding to the positive terminal?
Better put fishpaper rings on the plus side as an extra safety measure in case the shrink tube breaks. The whole can of a cell is minus, so you can get a short from the nickel strip on the plus side.
I also got a pair of LP 20 likes yours. how did you include the MT connectors inside ? epoxy or a custom 3D bespoke part that you epoxy inside ?or is the MT60 completely free flow and you just use the CNLINKO to protect the flow ?
I’ll be coming with 3 motor wires inside the connector so I need to put some epoxy or 3M 5200 to make the connector waterproof on the outside.
Just a reminder for BEC’s installation. On a dual tow boogie, we have to focus on good motor reactions because they work as twins. I already have motor power oscillations which are a pain when the boogie zigzag during rides.
To achieve that we need PWM signal + receiver stability
Advice on BEC’s manuals is to set it far from receiver and antenna and in fresh area. Personally I will stick both BEC’s directly on my main cooler.
I don’t think so, because the motors are far from PPm wire and under water.
But instead of putting BEC and receiver in the same box like on DIY Foilassist , it would always be better to keep both BEC’s outside the receiver box , cooled if it’s possible, to avoid extra heating of these elements because BEC can be very hot. And cheap BEC’s very very hot
This extra heat is not good for the system stability IMO and could affect the PPM signal quality or motor desynch. Personally I had motor power oscillations, I believe it came from that.
I’ll see if it improves the system behaviour on next trials.
The BEC (battery eliminator circuit - I hate acronyms) is just running the receiver board isn’t it? It shouldn’t get even warm with such a low current.