Trying to build a tow boogie with a rudder so we can get it back easily.
Using the VESC 75V 300A, along with the “Maytech Electric Longboard Esk8 Remote 2.4GHZ MTSKR1905WF” that has 2 tigger buttons. We only use the main trigger for the motor, and wanted to use the break trigger to control a servo that would be attached to the rudder.
when contacting Trampa boards about the VESC they said it is not possible because it would require too much current.
when contacting Maytech about the remote, to have the 2nd button control a whole different board/power supply, they said they could program it do that, BUT I would have to buy 200 remotes from them to have them do it.
Any ideas on how to get that other switch on the remote to work with a servo?
I only see 1 trigger on the Bremote and 1 dial switch. not sure how you would use it for speed + direction with only 1 trigger. or do you have an option so you can use another tigger at the same time for direction, one for finger and 1 for thumb?
I have ordered the BREmote PCB’s and have extras if anyone in the US is looking to build a BREmote. I also have some extra magnets, displays, NRF modules both long range and standard range and a couple 14500 batteries. I am just looking to sell them for exactly what they cost and will ship in the US. feel free to message me direct.
I have not done it yet. Do you have any images or more info on the rudder size and how far in the direction it was going? But sad to hear if it won’t work. Was hoping it would work.
Give it a go and see if you had better luck than me.
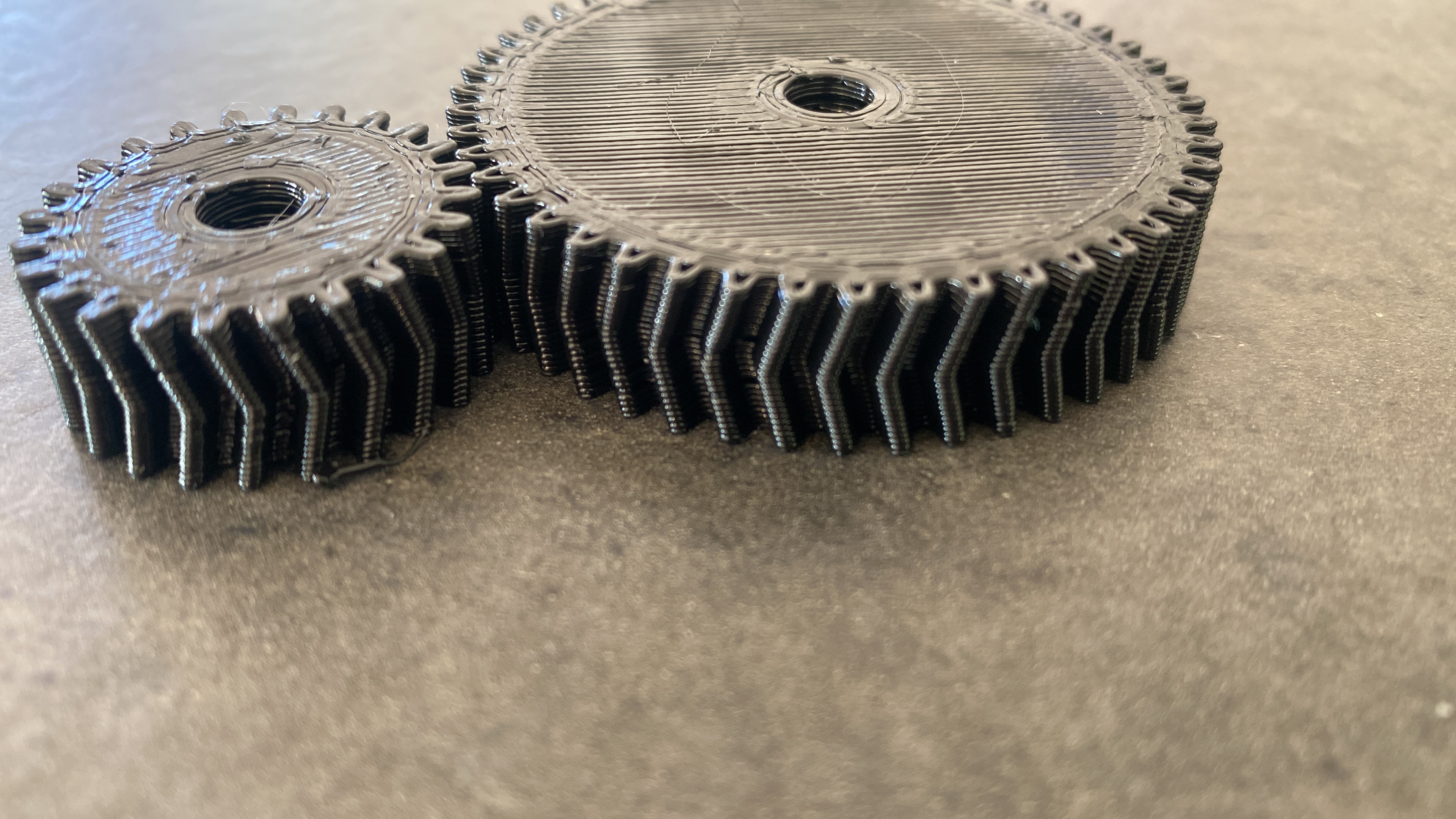
I tried a few different options, one was 80mm deep and 50mm long at the back. For testing I used an RC servo and a seperate controller. I 3d printed a gear system to increase the torque.
The other test I did was in the motor pod, it gave a turning circle of 100m or so, so not very practical!
On top of the steering with one/two/three servo.s, the bremote allows differential steering capability to the Rx firmware by connecting two seperate VESC + Motors. Steering is done by slowing down either motor.
This method steers tanks so with two cheap Flycolor 50A ESC controling two 63x4 motors…
3D printing gear was a lot easier. I had a 270 degree servo and and only needed approx 90 degrees for the rudder, so got a 3 X torque increase with the gearing. The tourqe wasn’t necessary for steering, 3D printing gears was also quite fun to try.
I came to the conclusion that you would need impractically large rudder to make steering work properly, and that the rudder would be easy to break, and it would something else that the rope could get caught around and tangled with.
Differential steering is a good idea, but does mean 2 x outrunner motors and props which is probably cost neutral with using a larger 65161 motor, but requires more maintenance.
I’ll do a build post in a couple of months when I have have a version that im happy with.
I built a dual motor boogie and found it much cheaper than building one with a 65161. It was less than $300 for two 6384’s and two flipsky 70a Vescs. I am waiting on parts from Ali to build the BREmote so I can try directional control. Im gonna try and start a build thread and will update the progress on steering but the dual motor boogie works awesome.
Resurrecting this thread, can you elaborate on needing a keel? On a tow boogie with a mast and motorpod mounted further down doesnt that act a bit as a keel?
I knew the rudder on the pod wouldn’t be effective, but it made the design a lot simpler and nothing could get caught. Turning circle was 100m+
The rudder out the back worked better, turning circle 50m+ - still huge. But was not practical especially for a commercial product. It would get broken too easily.
The only good solutions were to pivot the whole motor or do dual motors. Dual motors means 6384 motors, and the corrosion and bearing problems associated with them that non diy people with Foildrive experience.
A pivoting single motor was then chosen. Turning circle 10m.
For the Boogie the actuator is splash proof, but it is underneath the PVC shell which is sealed and under positive air pressure.
Apart from a leak on an initial prototype, and one failure mode that’s been engineered out, the boogie has been 100% waterproof, unless there is a catastrophic failure of the hull or the shell.
If air can’t get out, water can’t get in.
One customer recently got caught on the inside and the boogie got washed up 10m up on to rocks on a 6ft + day.
Apart from a broken prop and a little bit of impact damage to the motor it survived. He even continued using it with 2.5 blades for another 2 hours!
That’s great thanks for sharing! I’m attempting a rudder design so at least I got some more info on what works and what doesn’t. I’m surprised that the rudder at the stern had such a big turning radius still.