My build from Aug that I’ve been unsuccessful in troubleshooting.
Any thoughts on why I have such low speed/amps are greatly appreciated!
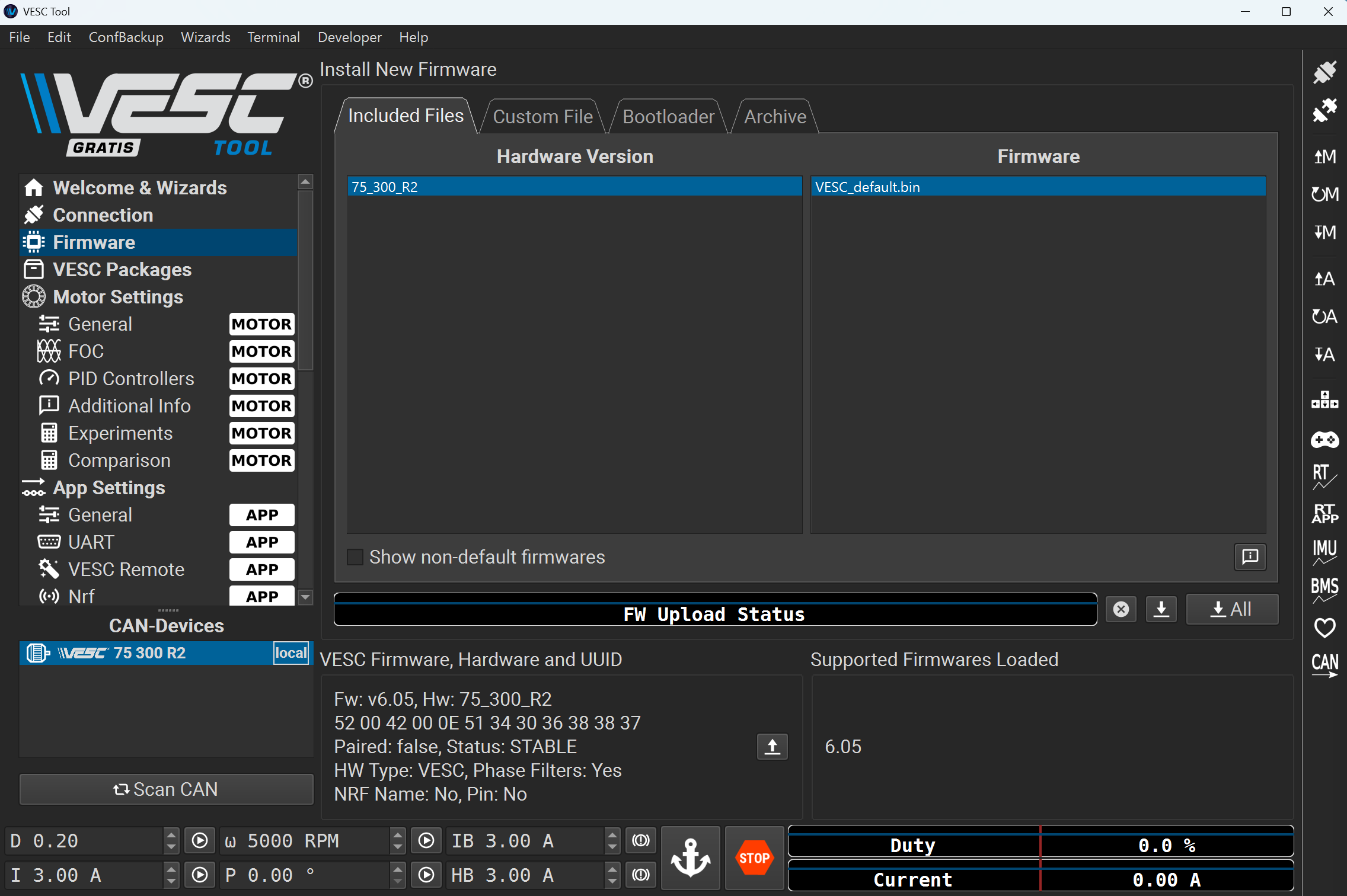
vesc - flipsky 75200 pro
motor - flipsky 6384 waterproof 140kv
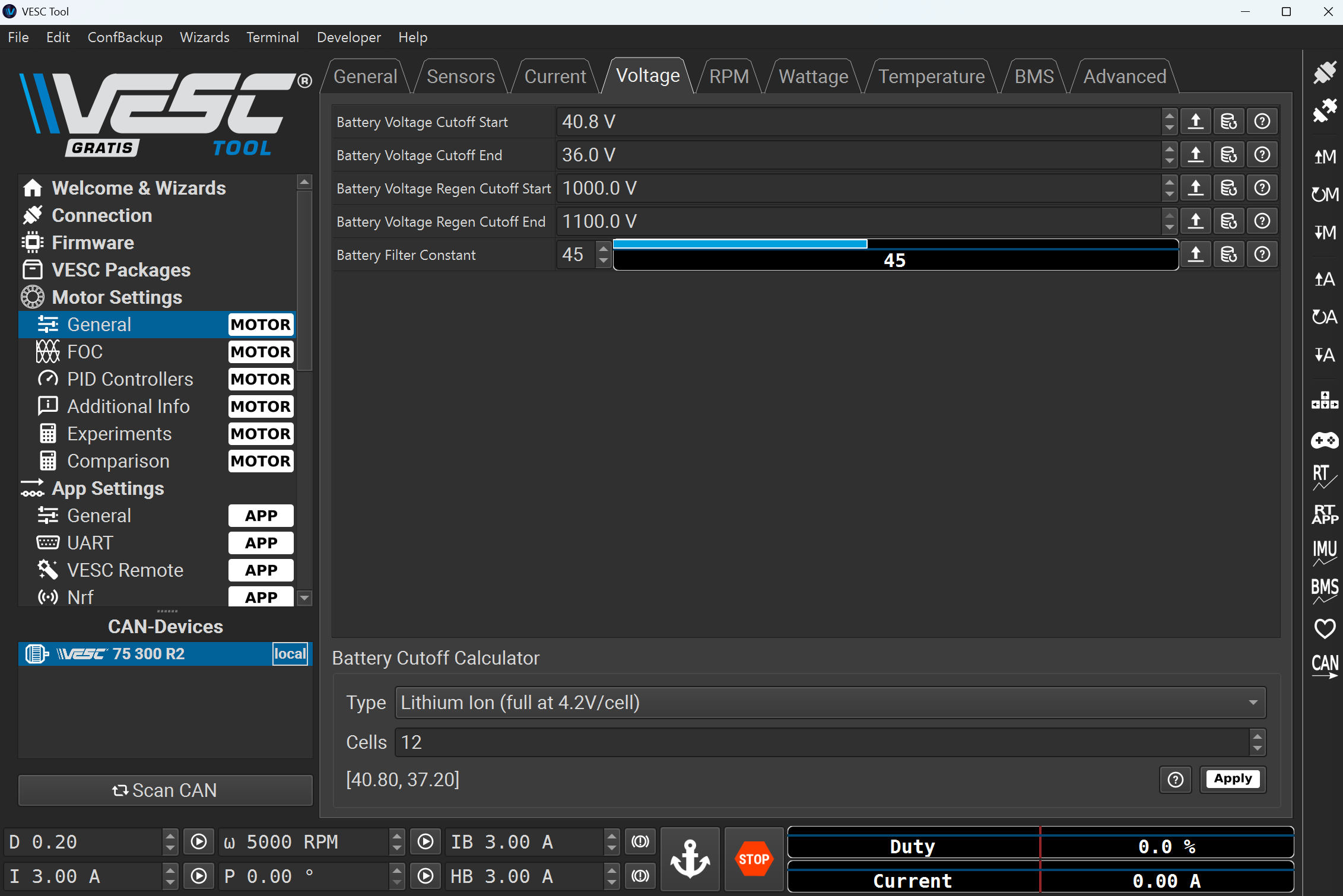
battery - 12s4p eve40pl
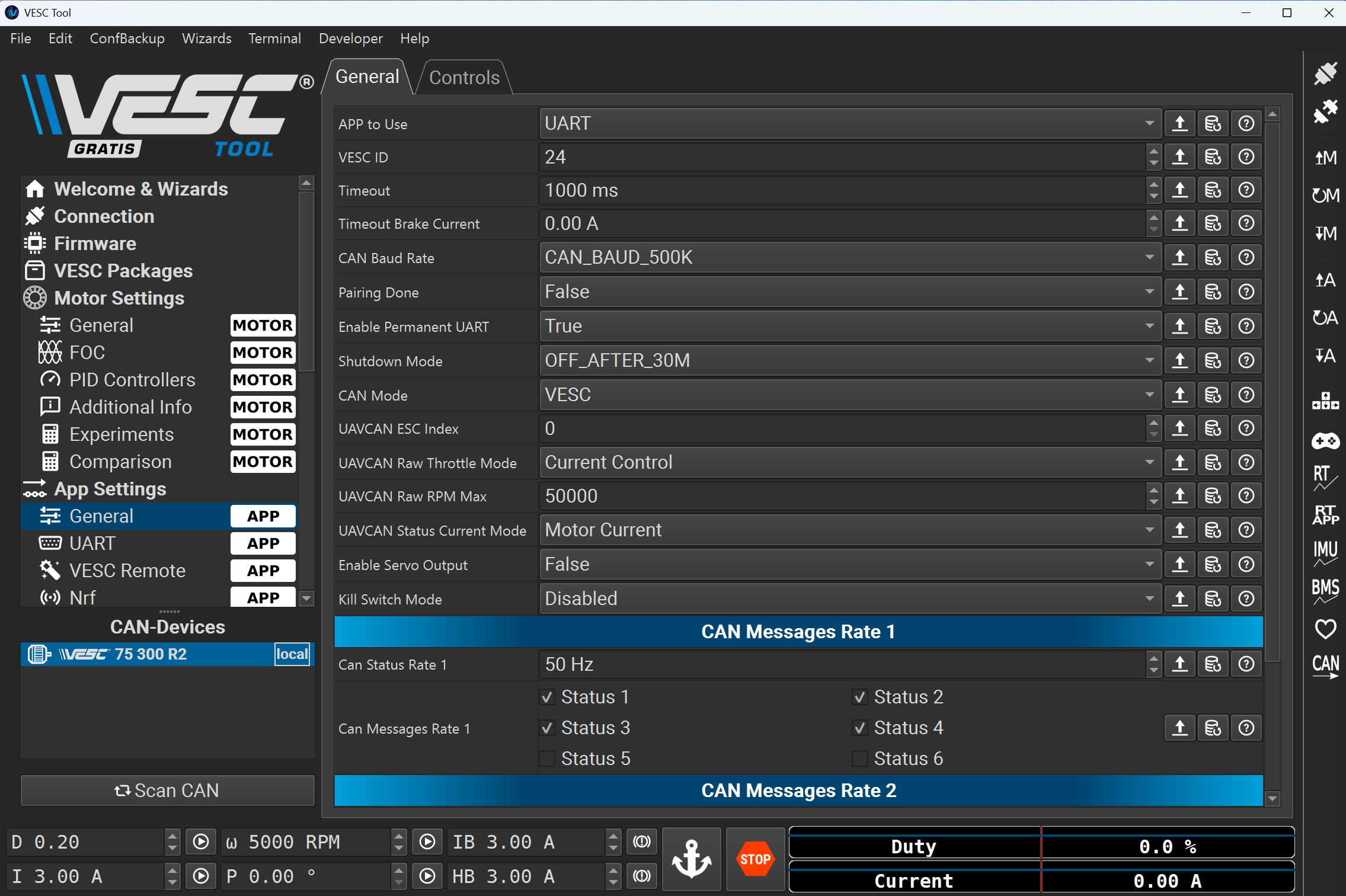
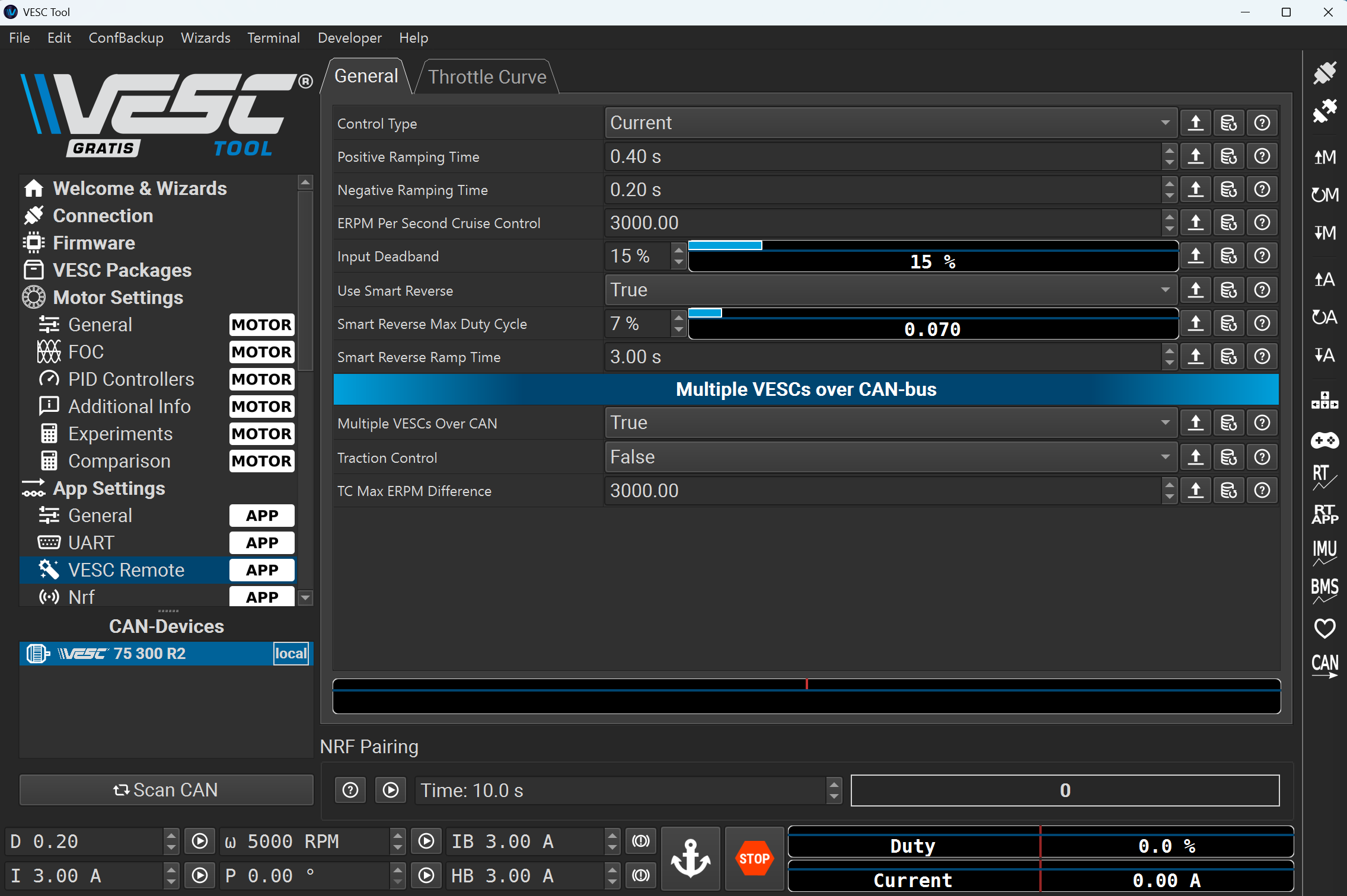
remote - flipsky v3 pro setup in UART mode
cable - 10awg triple conduit
trifold prop
142L North Seek wing board
Front foil wing - slingshot infinity 84 (2066 cm sq)
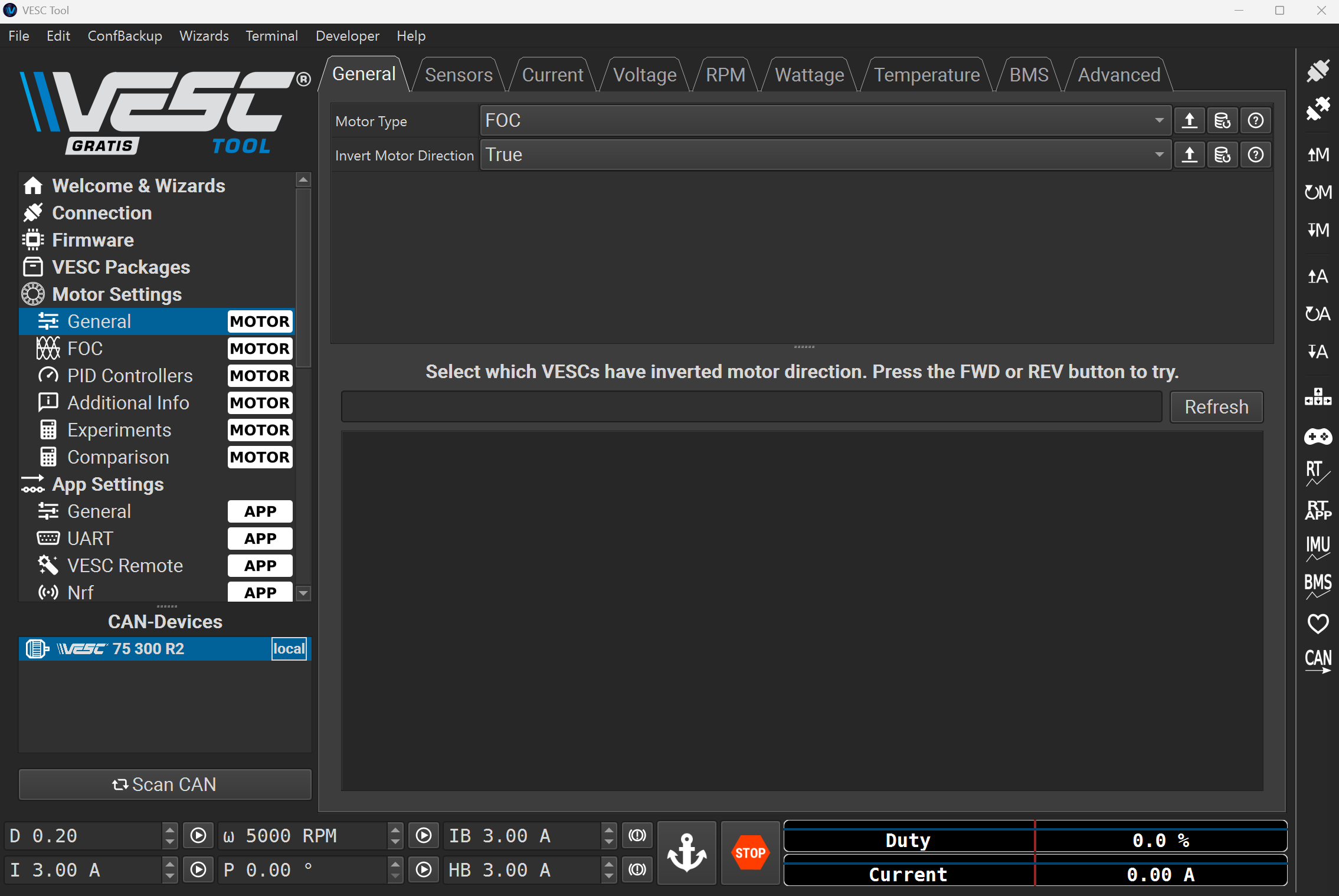
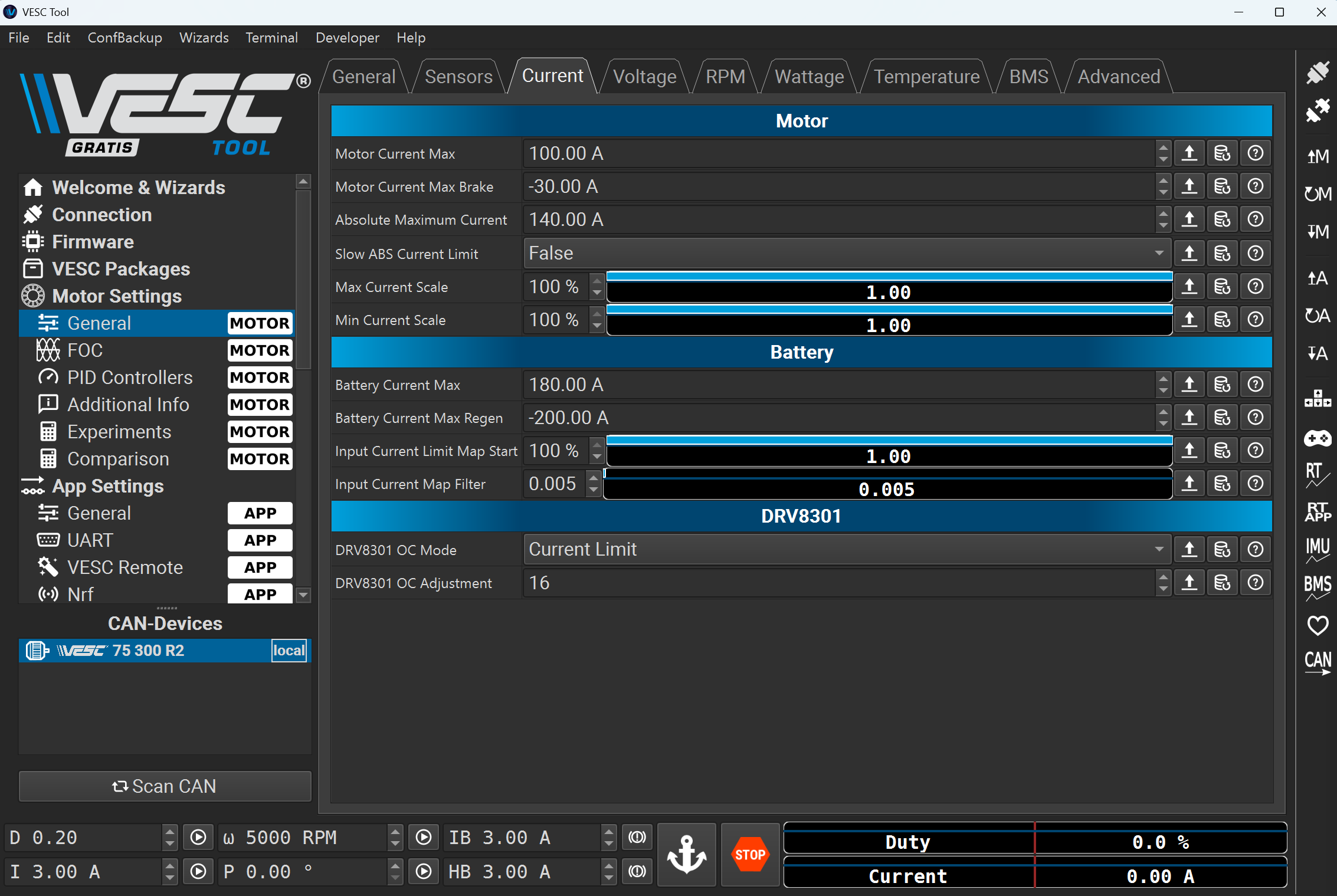
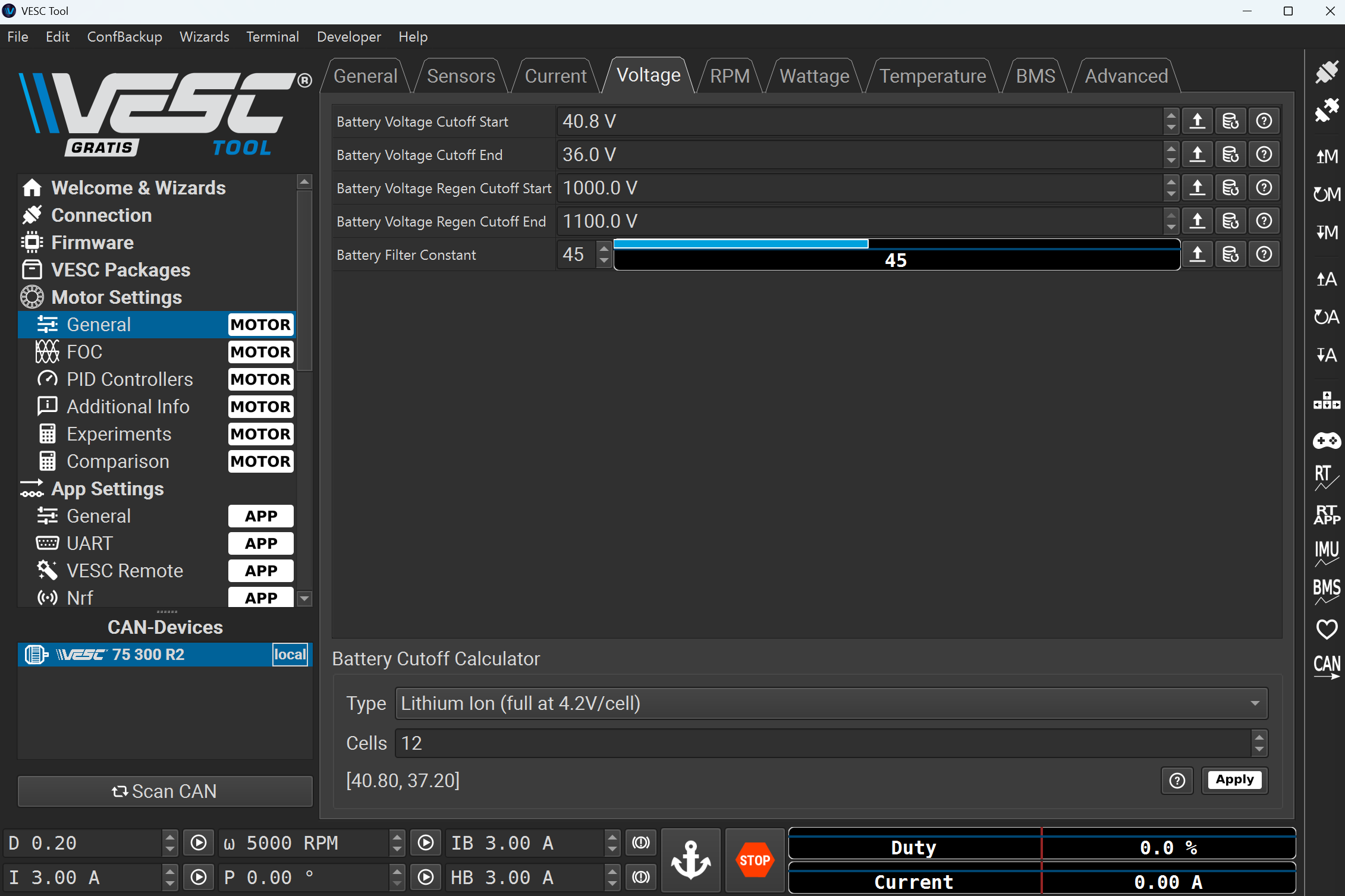
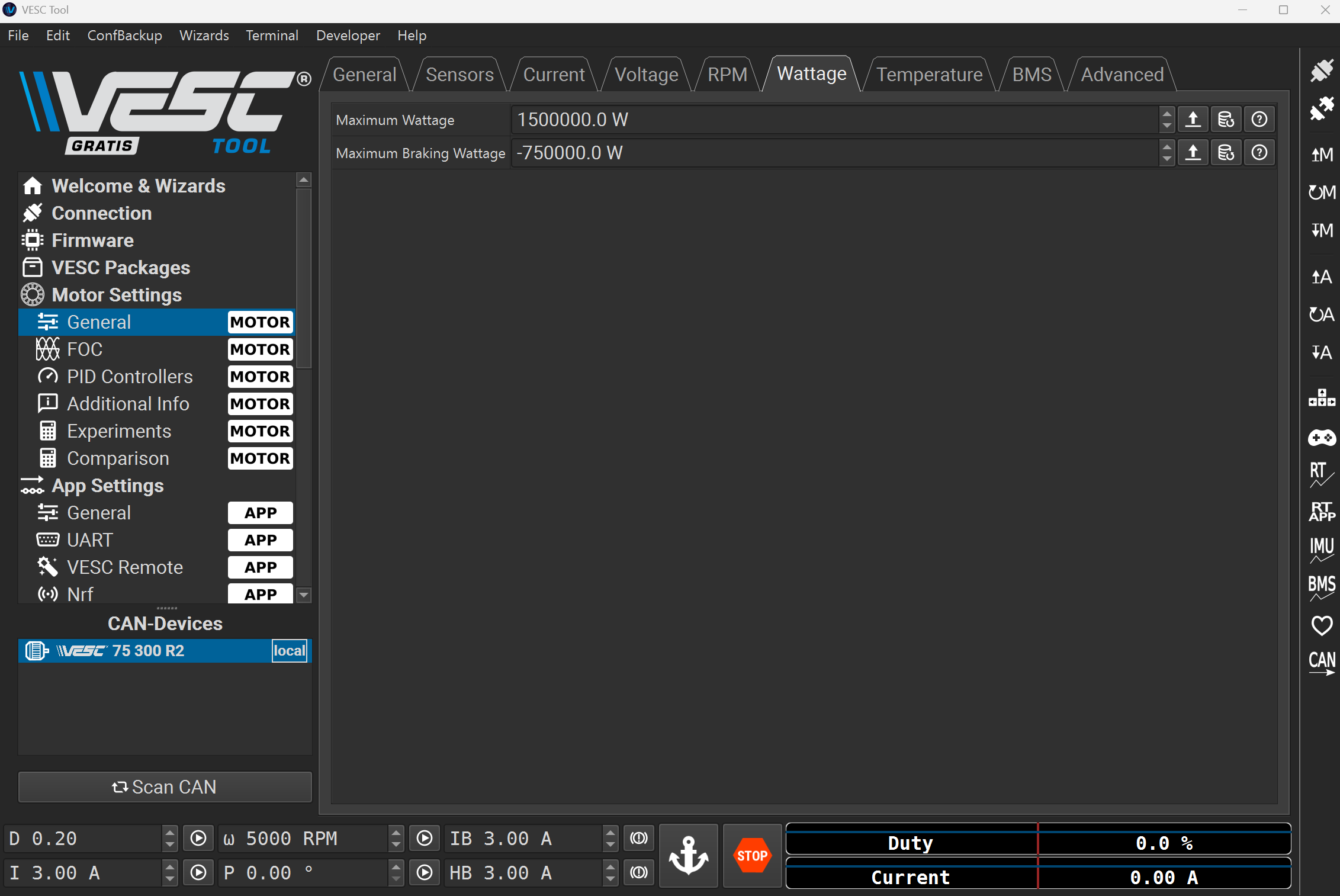
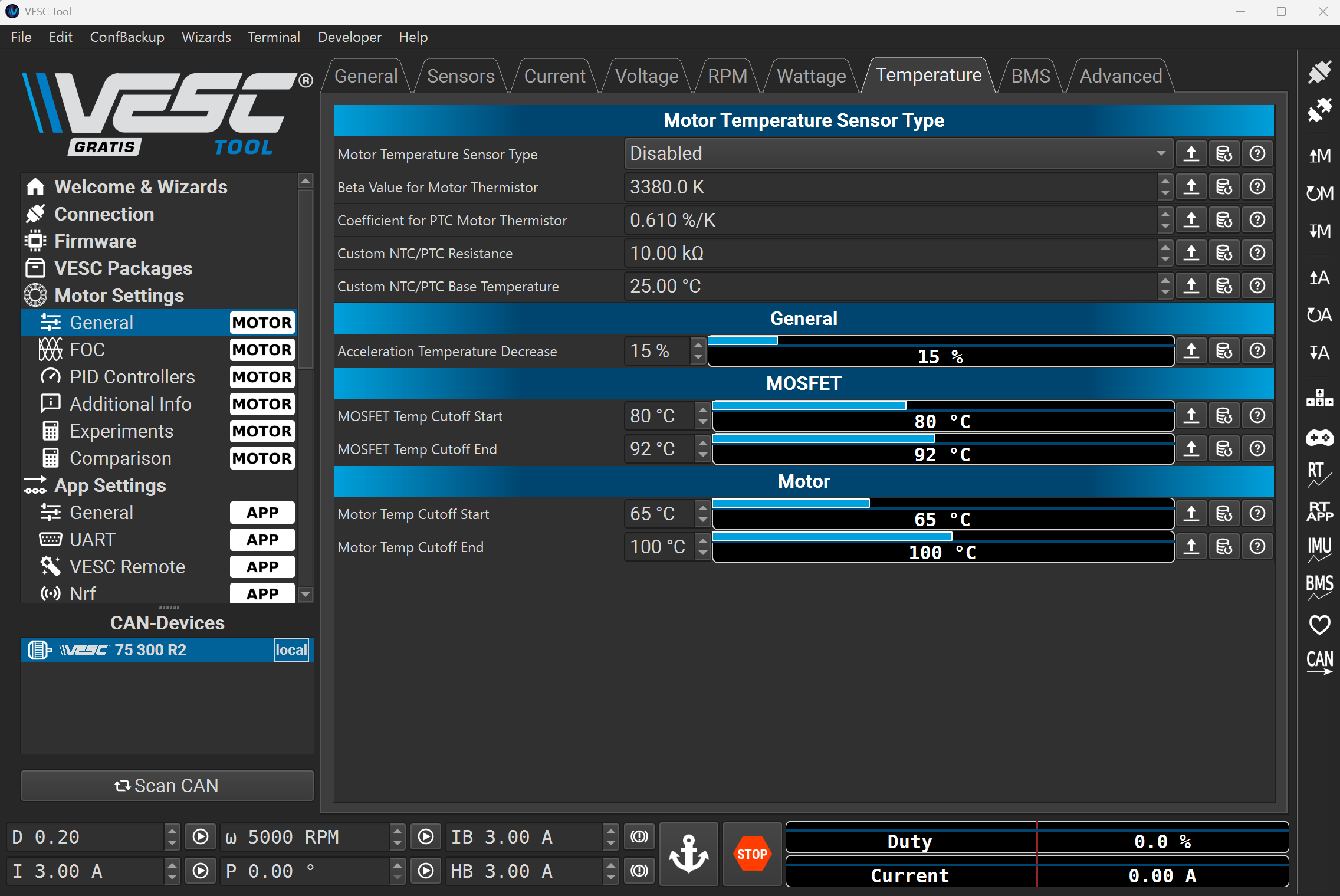
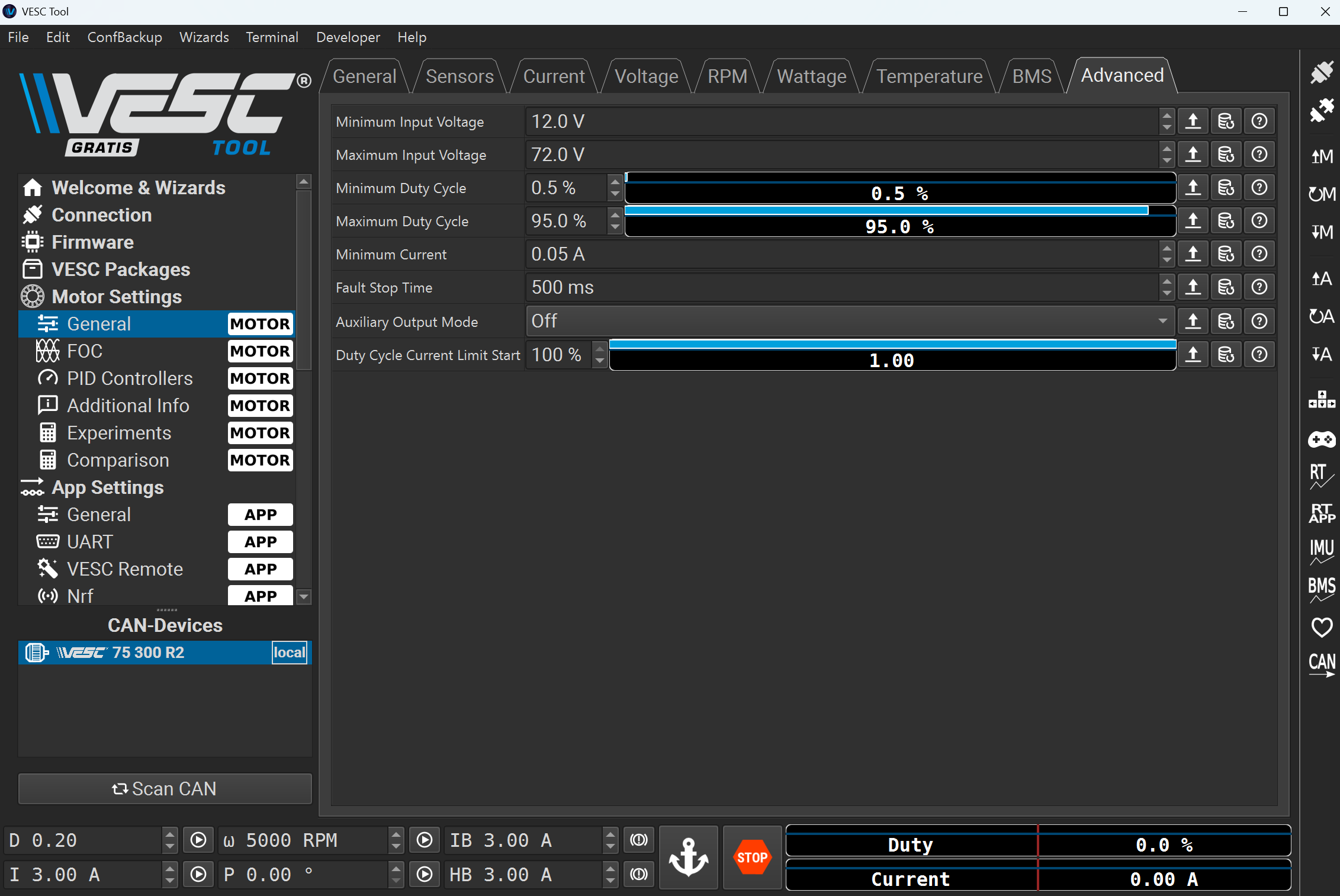
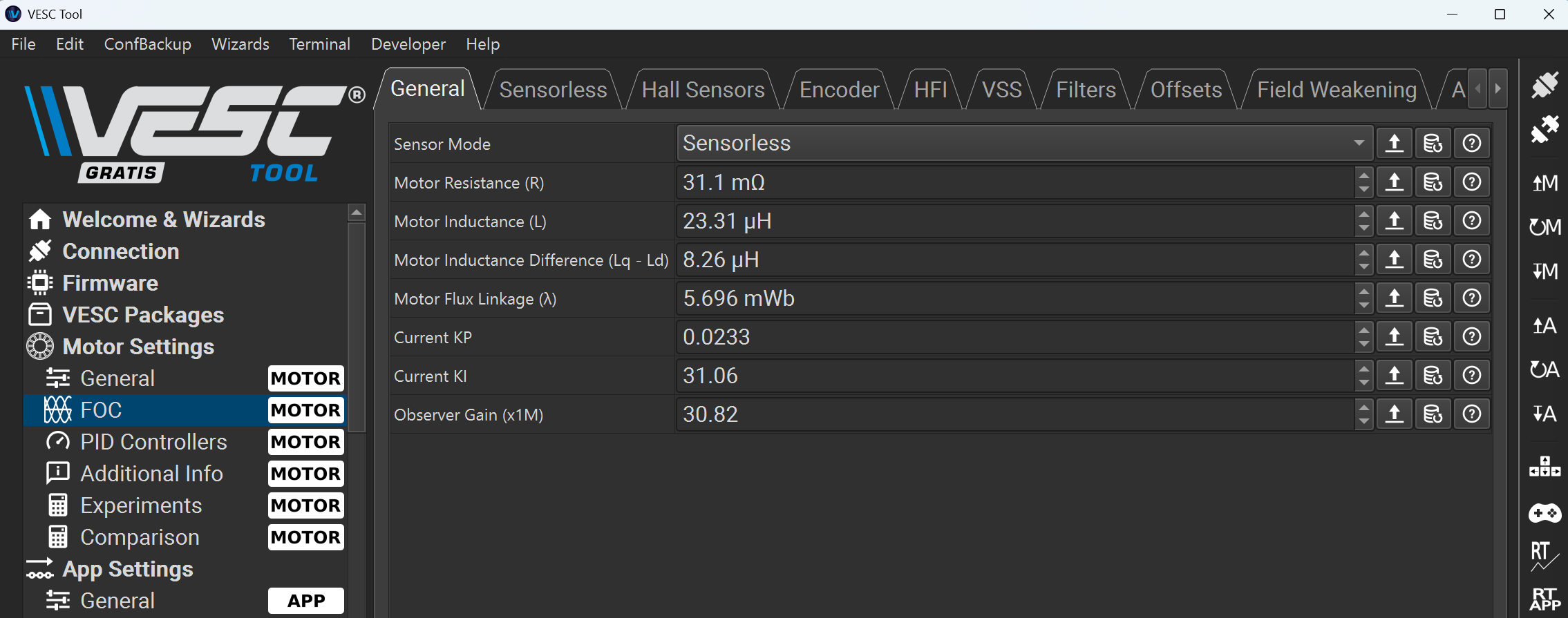
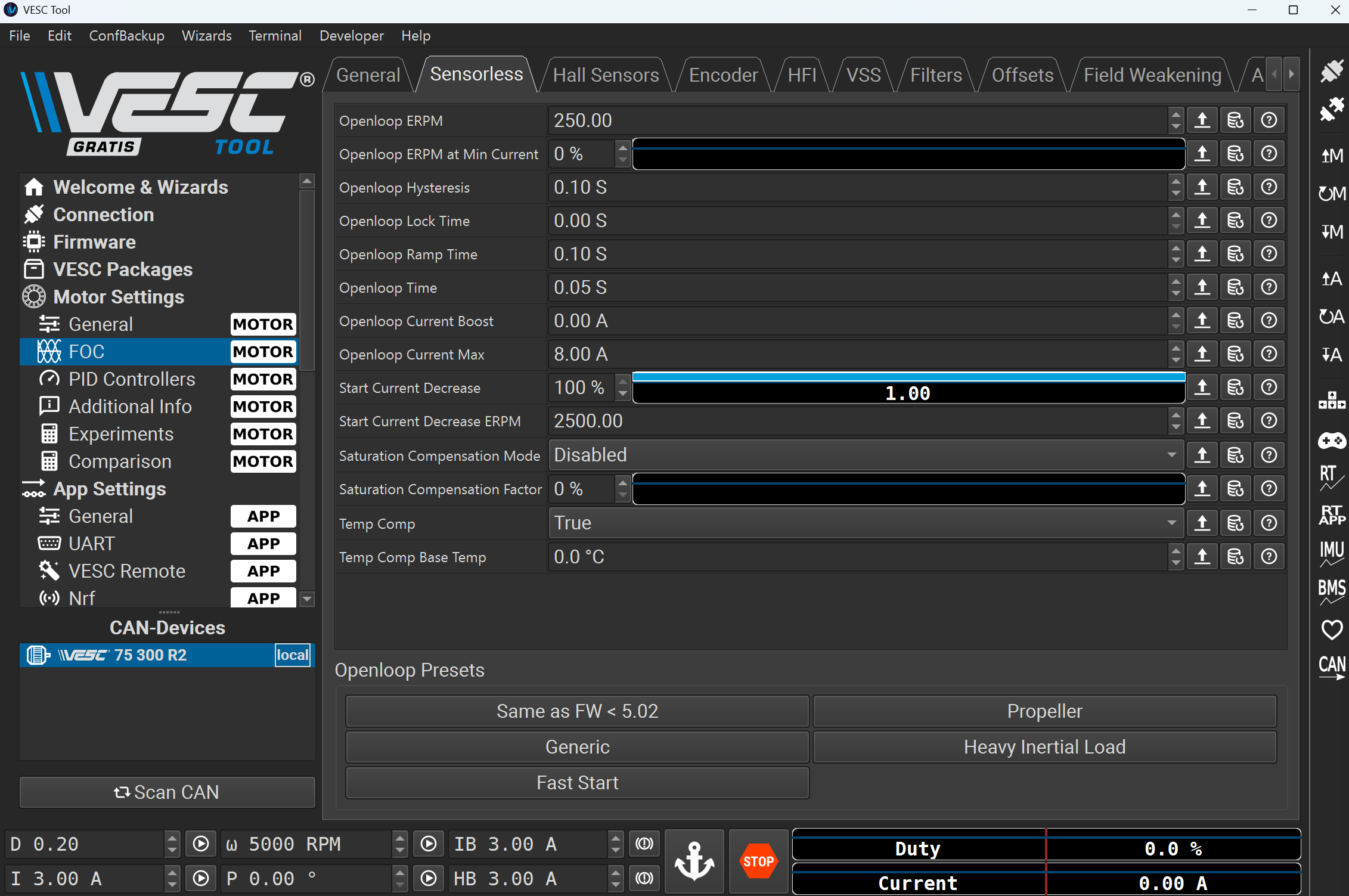
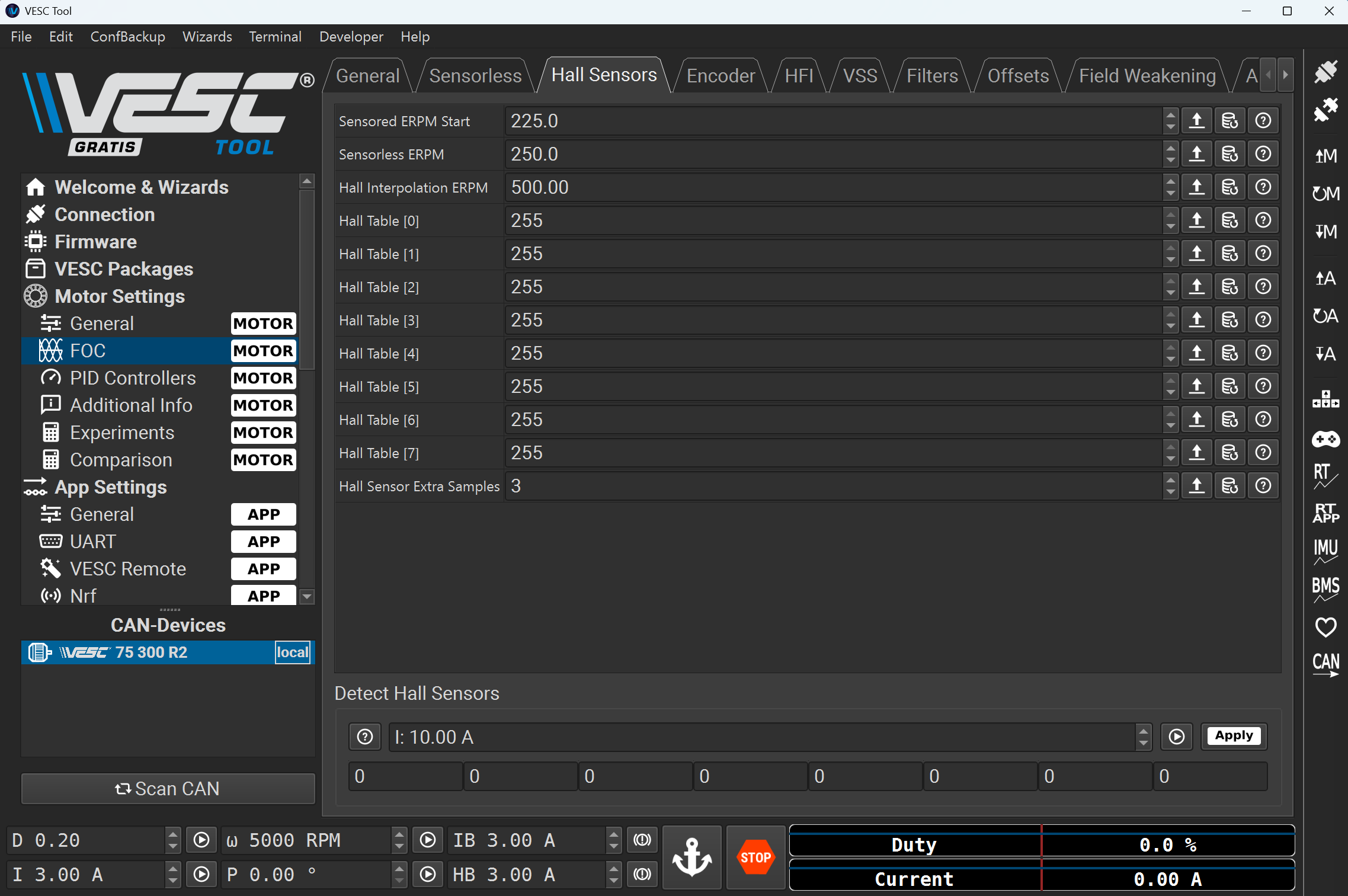
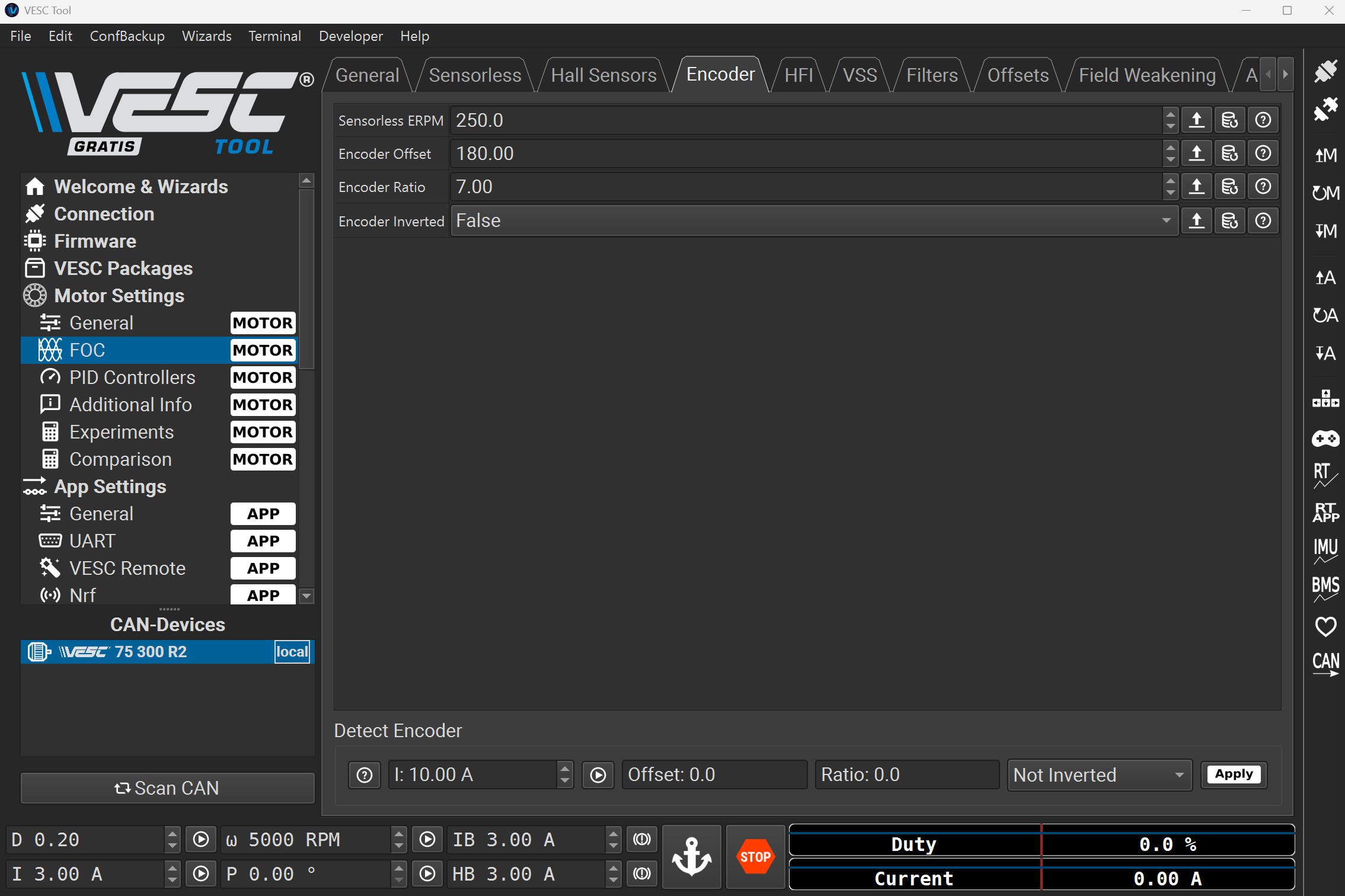
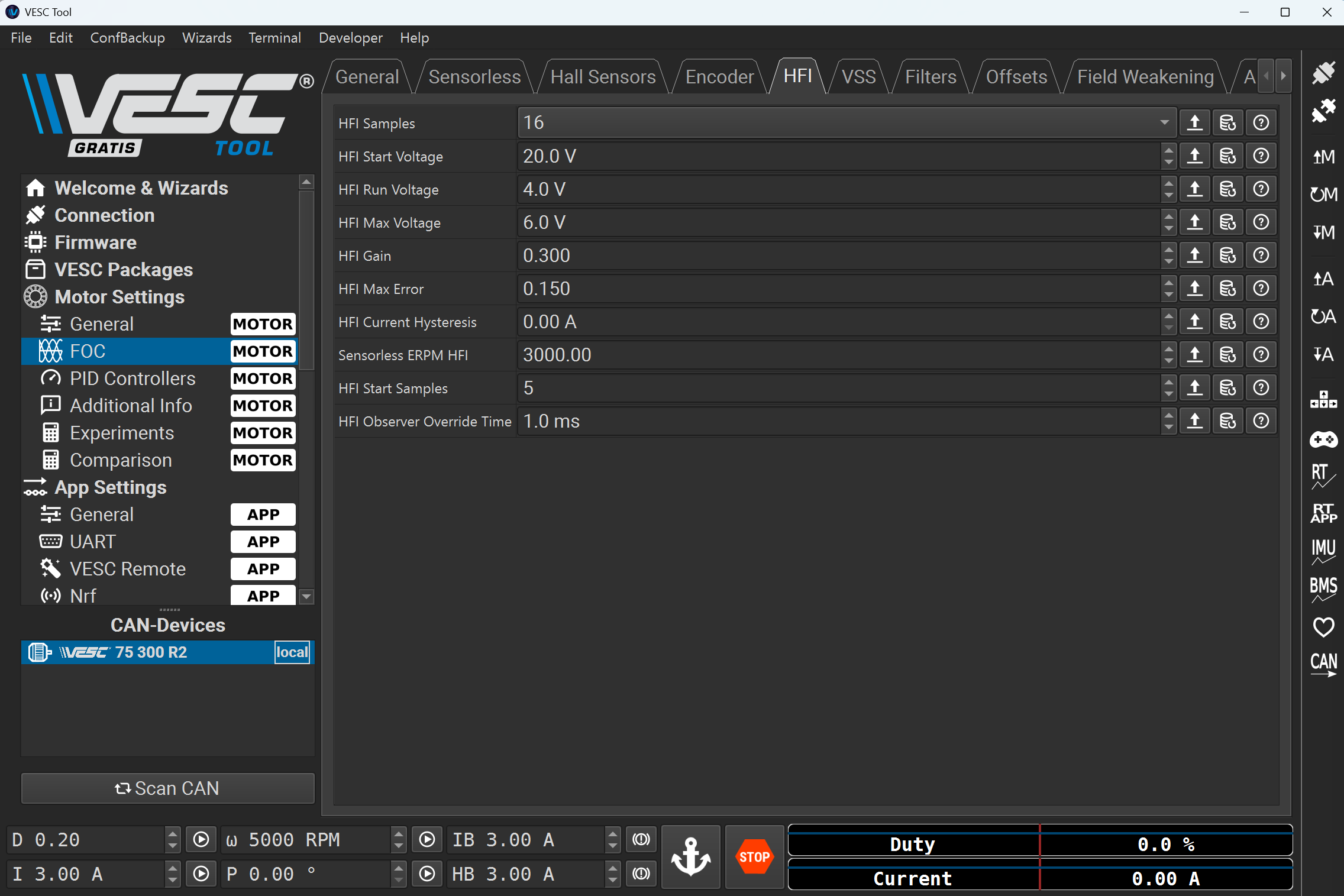
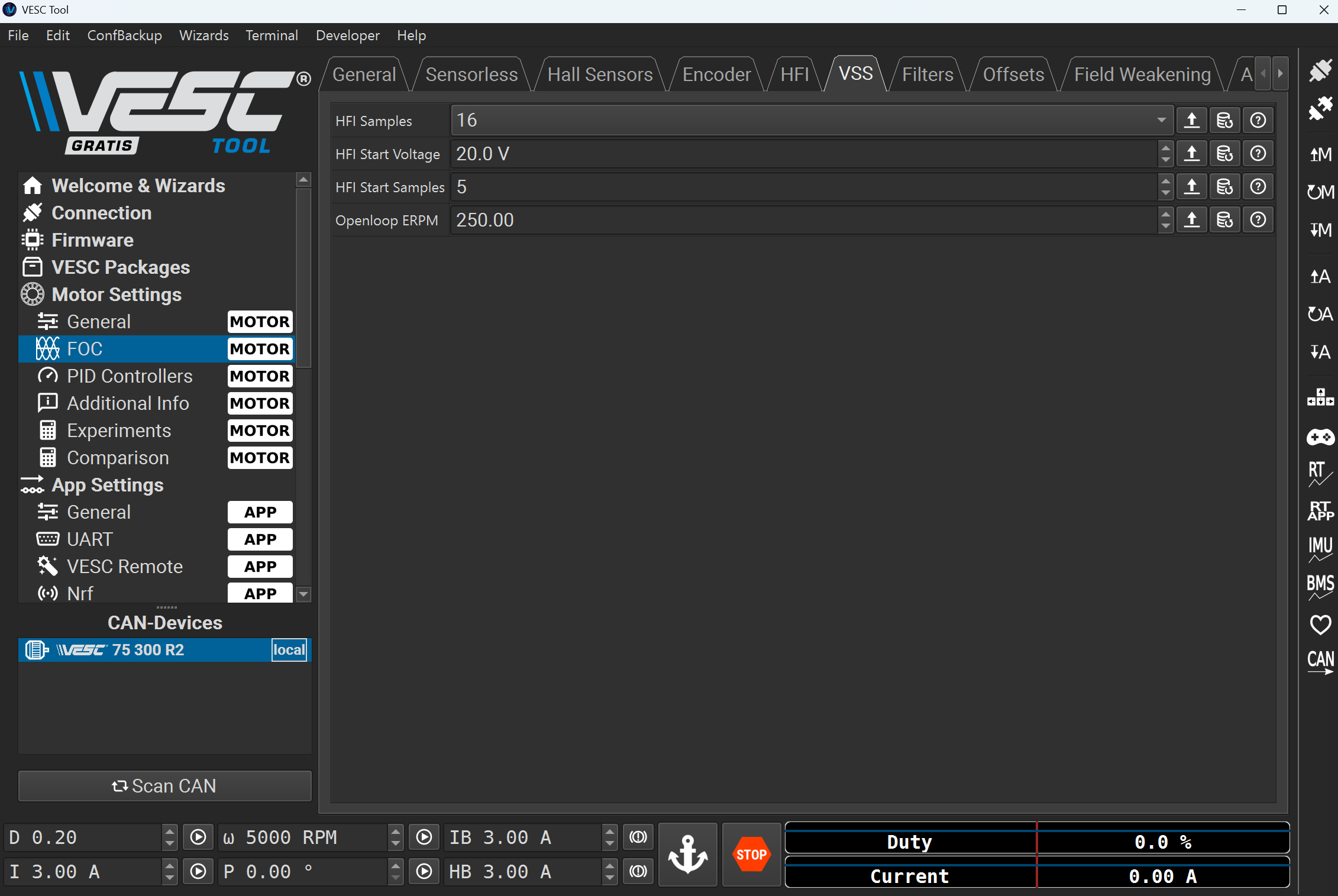
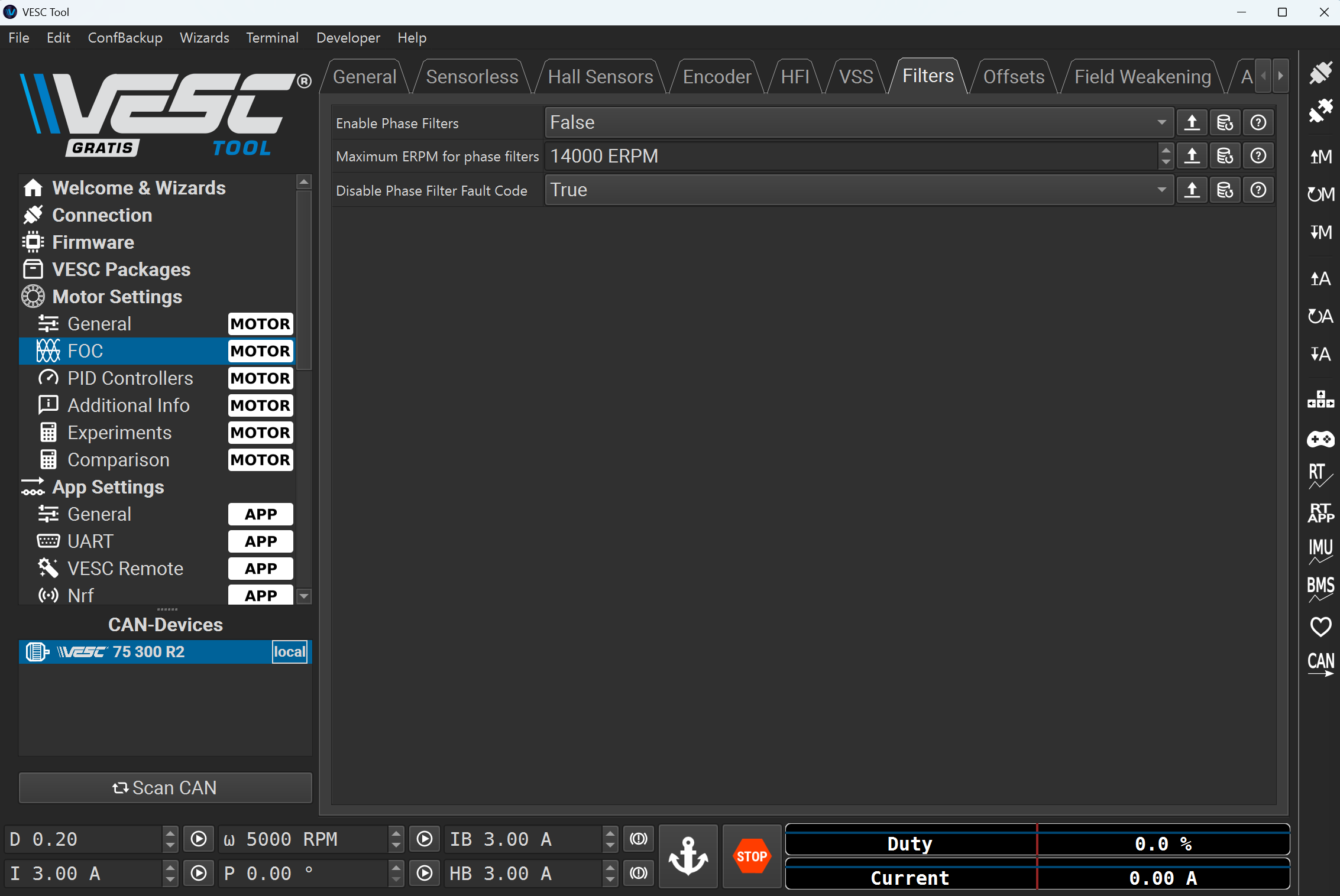
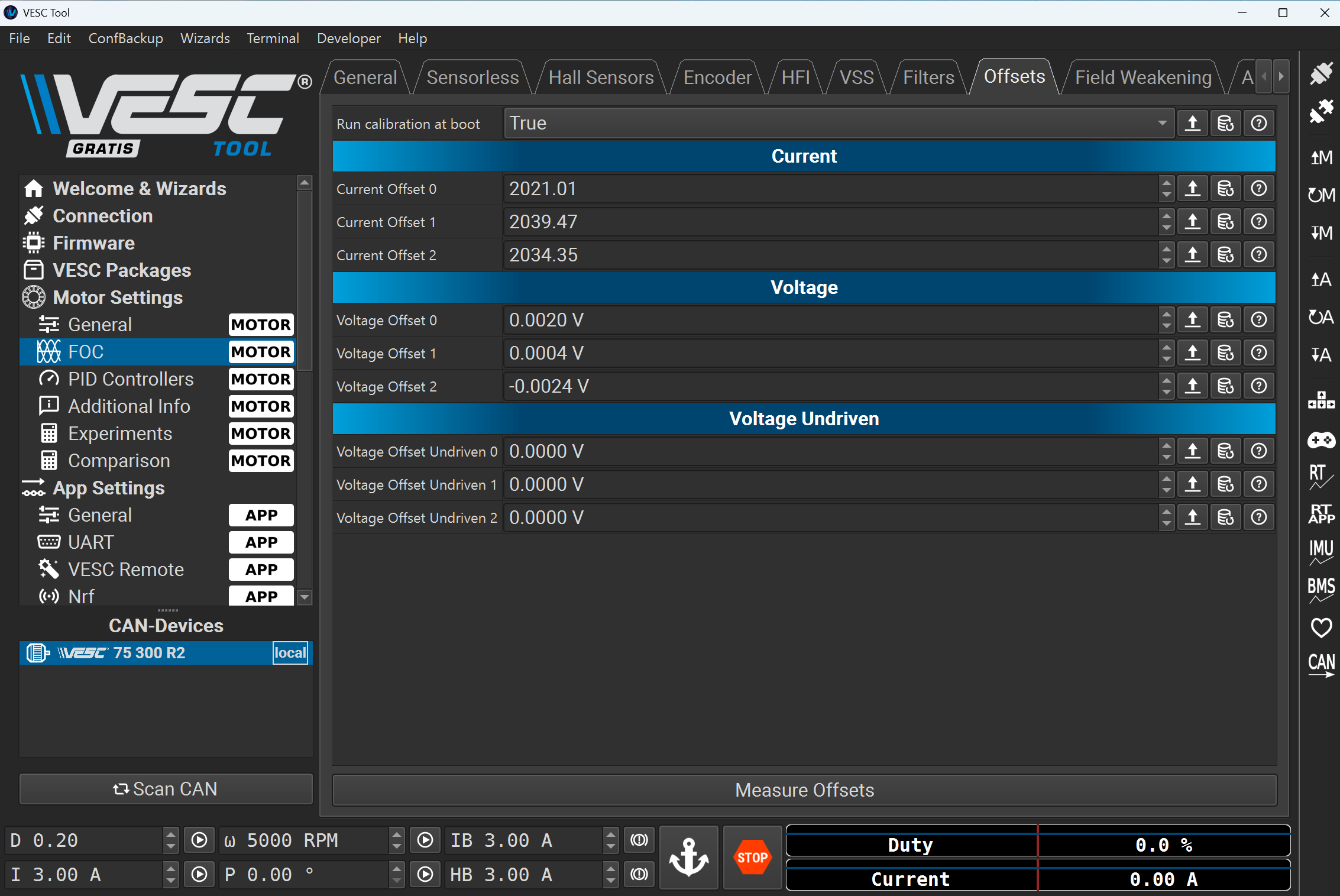
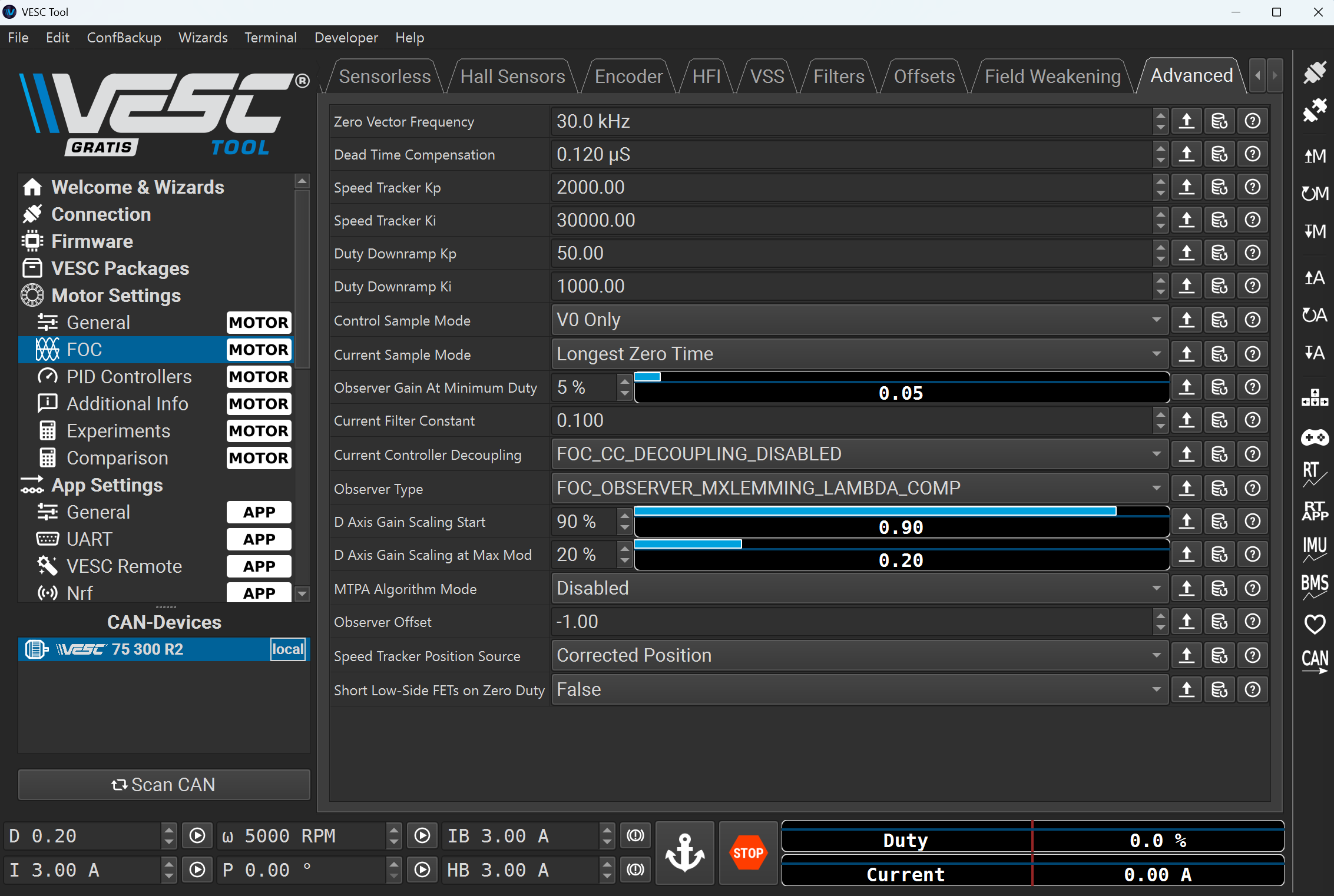
Issue: speed maxes out at 6-7kms/hr on flat lake water. Drawing less than 30 amps at full throttle. But amps for motor are set to 100. Not sure if my other settings are off, so I’m including (probably too many) screenshots. Vesc never gets hotter than 30 celcius with running for several minutes (the vesc is just sitting in the box with no cooling solution (yet).
30A of Battery or Motor current? The remote likely shows battery current, which differs from motor current based on its RPMs…
My first instinct: Propeller too big → with 100A motor current only 30A battery flow because you cant get to any meaningful RPM
Solution: Increase Motor current a bit or take propeller with less pitch or streamline foil for less drag
2nd option: propeller is too small / has too little pitch (unlikely)
For my setup (6384 140kV, 75200, 1200cm² wing, 100l board, 75kg rider) I need about 140-160A of motor current to get out with a 6" propeller…
Weight, Streamlining of the eFoil and Technique mainly influence the amount of needed current… anyways you likely have too little motor current
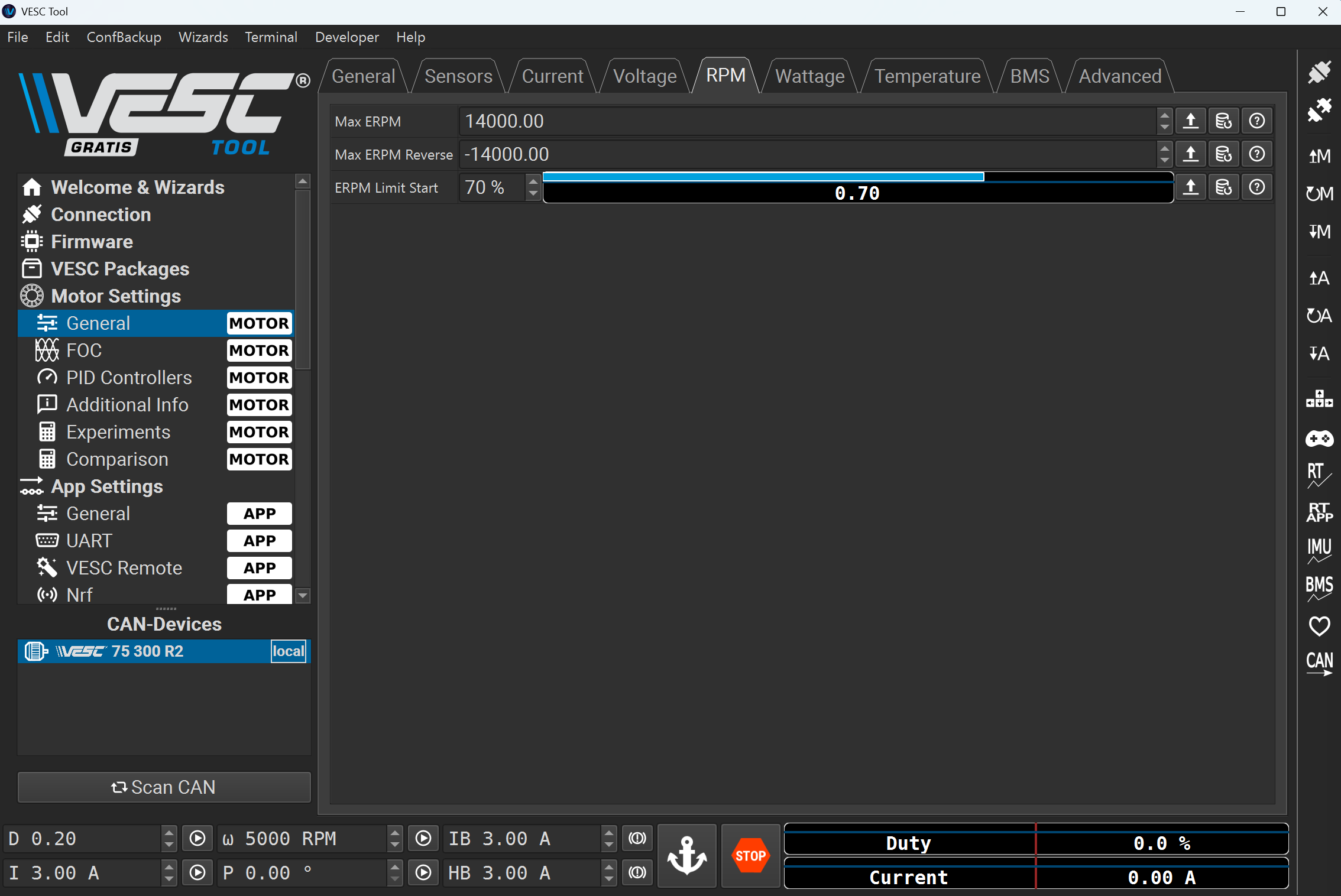
To find the value for erpm, I thought is was 100000/7pole pairs = 14286. I read that somewhere, but maybe I’m misremembering. Is this wrong? What should it be set at?
You want about 5.000 RPM at the output of your motor, because that results in 40km/h at 6" propeller
The ERPM ist the electronic rpm, so how often the VESC needs to switch, which is once per pole pair that comes by.
So you need to multiply 5.000RPM * 7 pole_pairs = 35.000 ERPM
The 100.000 value is the maximum the 75200 can do, you can also set that value, no harm done there, the motor will never reach that anyway… that would result in 115km/h btw
All three prop blades sheared off in the first 10 seconds of today’s water test. I’m calling that a win. I must be getting more power now.
Does anyone have an stl/obj prop file that will fit the flipsky waterproof 140kv 6384 motor and won’t disintegrate within 10 seconds? (I tried adding carbon fiber reinforcement to my prop, but it was my first time working with it, and it obviously wasn’t sufficient).
It was a 3-blade folding design that noted it was not strong enough without carbon fiber layup. So I’m guessing it was pretty weak. (it wasn’t my design - is the b-series app for designing your own props?) Going to try the adapter plate file @hangloose sent me for a different prop I have. And also printing Volker’s 2-blade folding prop. I increased the walls but not as high as you mentioned, so I’ll try that if they don’t last
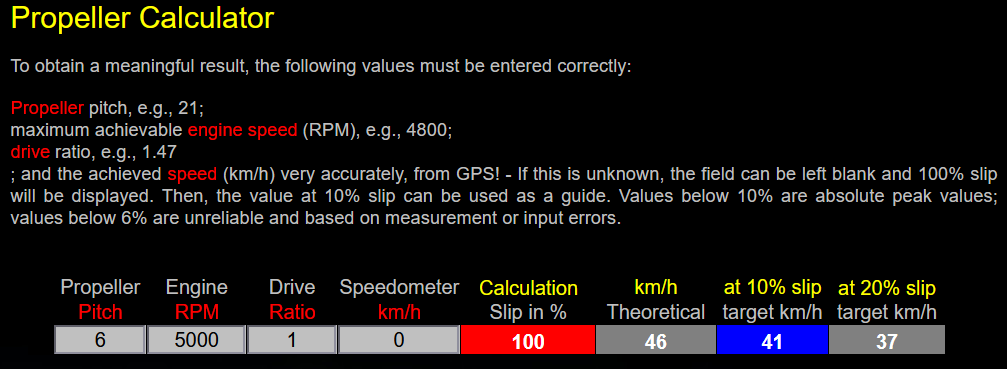
Looking at this calculator, I realised I needed a translation… and a refresh
Distance moved per prop turn per min = 1 prop pitch length per min = 1rpm x pitch x 0.0254 m/min
m to kmph, divide by 1000 - /min to /h mult by 60
Theoretical speed at given RPM in kmph (0% slip) : RPM x pitch x 0.0254 x60/1000
Taking slip% loss into account in kmph: RPM x pitch x 0.0254 x (1-slip%) x60/1000
With above numbers: 45.72 = 46kmph
From 46 to 40 kmph represents a 13% speed loss (slip)
More power in today’s test. Prop held up.
But now power cuts out completely when hitting about 60 amps and 90% on the remote power bar (set in High mode). This gave me about 10.5 kms/hr. So now I need to figure out why power is cutting off. Temp never got above 35 C and power only cut out for about 2 seconds before returning. (I cycled this about 10 times before calling it for today). I’m guessing I have a safety set too low somewhere.
Yes, that is the setup I followed, but I likely read some things elsewhere and made changes. I did go back and watch it a few times to see where I went wrong, but I should probably do it again
Update (in case anyone else is running into similar issues with this setup)
Changes: I set ERPM to 100000, increased current to 150A, increased absolute max current to 220A. Then tested. I was able to get on foil today for the first time, and only needed to be in M mode on my remote. When in H mode, I was still getting a sudden cutoff of power around 90% trigger (although power returned after releasing the trigger). Once back on the beach, checking for faults revealed an error code indicating a spike above 220. This spike likely caused the sudden loss of power.
So I have increased my absolute max to 260. Will test again tomorrow to see if that fixes power cutting off. I am also concerned that spikes to 220 will cause damage to the mosfets over time, so I’ve tweaked a few settings. I’ll share afterwards if I’m successful.
You can also set the abs Max current back to 220 and enable slow overcurrent limit, that is an option on the same settings page.
Generally spikes that high mean you have a suboptimal motor calibration. You can share the values here, maybe we can improve further.