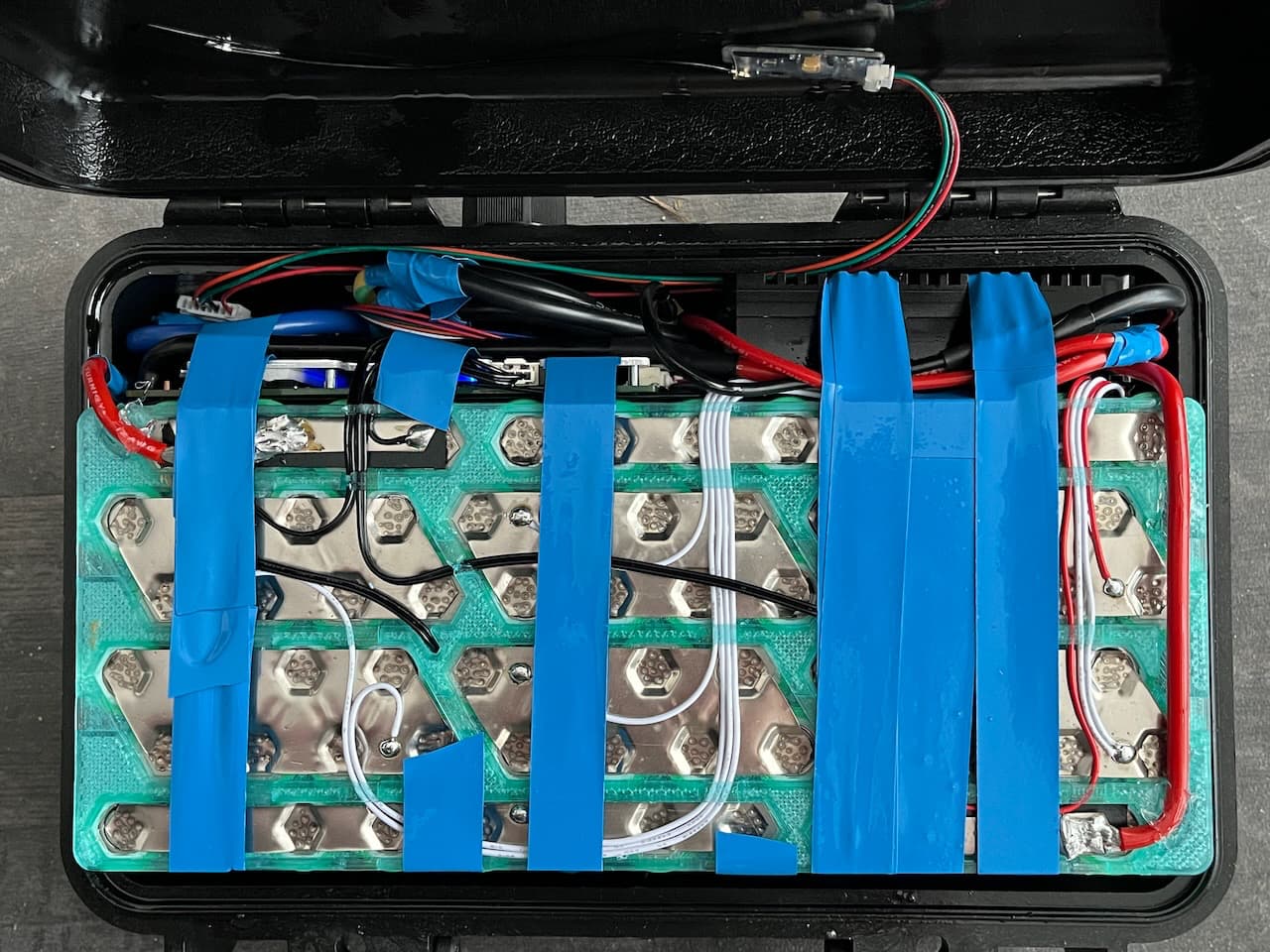
Pelican case PELI 1170 / interrior dimentions: 26,8 x 15,3 x 8 cm
Dielectric oil, DLLUB Isovoltine 2 liters
VESC settings:
FOC mode with current/torque control.
100A max current
As my battery voltage is higher than needed (18S), I added a RPM limit at 5000 RPM (45km/h without slipping), without the limit it would go up to 10kRPM / 90km/h
UART connection to the VX3 receiver with live current / voltage / power on the remote
Inside the Pelican case there is:
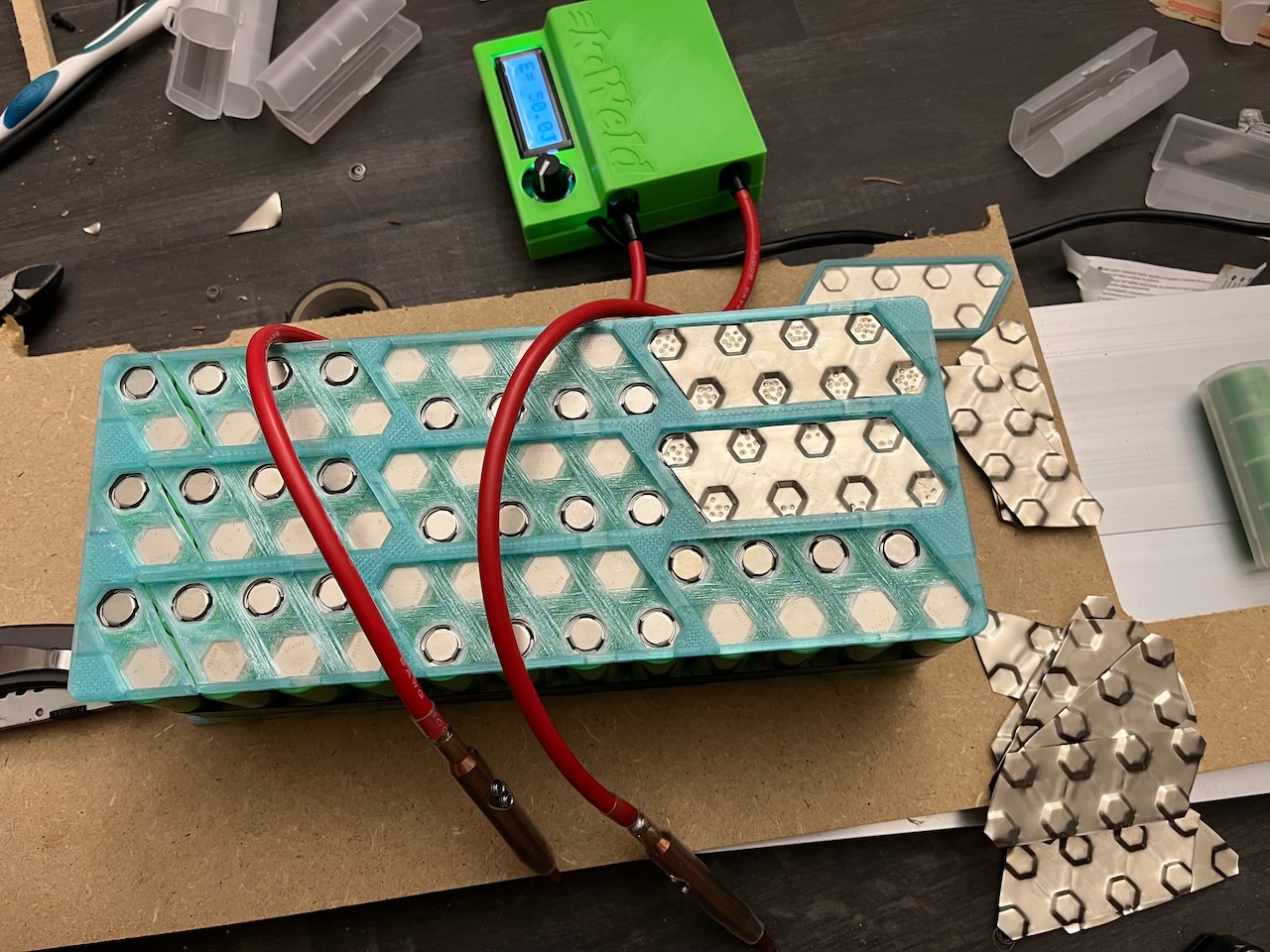
Custom, spot welded, battery pack
The ESC
The VX3 receiver
250mL of dielectric oil to cool the ESC using the Thermal mass from the batteries.
A M20 cable gland for a 3x4mm2 short cable going out of the case.
I need 70% of the throttle to take off with a peak power aroung 2100W.
My lowest fly speed is around 15km/h.
Highest speed so far is 34km/h.
With a crusing speed around 20-22 km/h I see the power fluctuating between 750W and 1100W. I would need some logging to get more precises figures.
In my last session the GPS recorded a travel distance of 15km with around 15 takeoffs (I felt a lot!). Being carefull I should be able to ride +20km with my 1332Wh pack.
Problems encountered along the build:
Excessive heat from the ESC makeing it impossible to takeoff after 10 minutes. Solved by half submerging everything in dielectric oil. The ESC stabilize round 60-70deg C. The oil temp rise by 10-15 degrees C over the whole session. So no risk of overheating the Liion cells.
Wrong prop choise, I used the Flite Propeller which has a pitch too high for my setup. I could take off in salted water downwind but not in a flat lake. The ESC temp often went up to 90 degrees. Solved by using the Mantafoil prop (150mm pitch instead of ~190mm). This made a huge difference in static thrust for the same motor torque (limited by my 100A controller)
Problems remaining:
Since I changed the prop, it’s now making high pitch vibration/noise that resonate in the alu mast and board. I want to try to recalibrate VESC for the change in rotor intertia. I hope it will help. But maybe it’s related to the prop material that is prope to ringing compared to the Flite prop?
No waterproofing needed so far, just 3 bullets connectors. No sign of oxydation. It’s not underwater when I apply power. Or maybe just the first second.
Nice work! I’m curious to see how you have the layout inside the Pelican box and in particular how this dielectric oil is done. Just sloshing around inside or is there some containment? I haven’t seen that approach for thermal management before (but maybe I just haven’t been around the forum long enough)
In the photo of the full board it looks like a small fin is coming out of the bottom near nose of board. Is that fact or just the person in the background carrying something?
I also hesitated a lot because I have not seen neither oil poured like this in a case with the cells + ESC. But I’ve seen people using oil for their ESC, other for the cells, so why not putting everything in the oil?
Why did you choose such a high Voltage setup?
Because if the ESC supports it, I would say why not? That’s less current between the battery and ESC, and I can always add a software limit.
But mainly it’s because 18S4P was a convenient layout to tightly fit in this case. I do not see any drawback in going higher voltage. In another built (ebike/scooter) I went up to 20S, the ESC max.
In the photo of the full board it looks like a small fin is coming out of the bottom near nose of board
Yep it’s a fin. It came with my board. I suppose it helps stabilising the board when navigating without flying. I also use this same board for Wingfoiling.
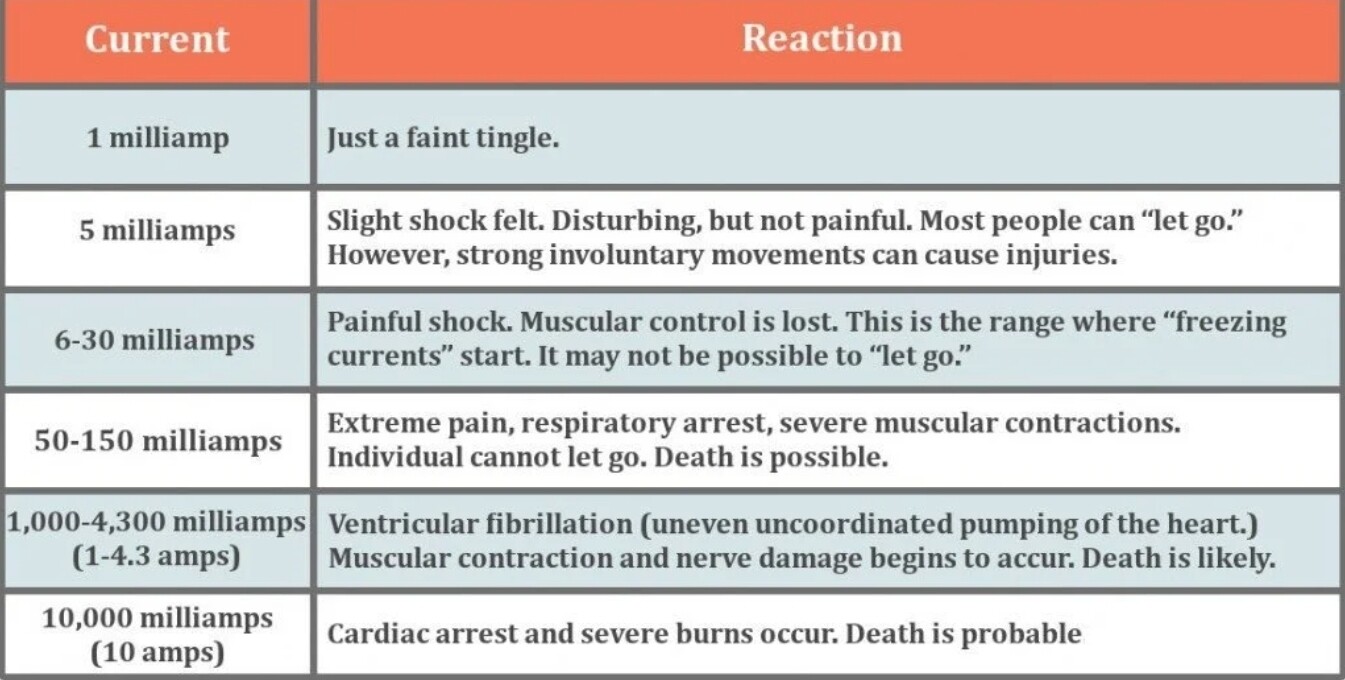
18s is a risk for electric shock even with dry skin. Wet, salty skin is a lot more risky than dry: dying from cardiac arrest is a drawback.
I’m not inclined to be the safety police but if there is a lethal accident we are pretty certain to get legislation on efoils and all sorts of diy builds - i wish everyone stayed with at least 14s or lower.
Haha, not bickering at all. Basically just saying that all of us are technically at risk even at 6s-14s. Regardless of voltage though, the risk comes from length of exposure, amount of current and the path it travels through the body.
I’ve been zapped by a 12s efoil that had water in the hatch and had contact with battery terminals. Thankfully it was just the one finger though…
Ok so that at least 1 drawback of going 18S. Thank you for pointing it. So please don’t do this at home.
In my favor, with my setup with ESC + battery in the Pelican, battery voltage is never exposed externally. I never open the pelican at the beach. The BMS on/off is Bluetooth controlled. And even if there is a leak, I do not see how both battery terminals would be exposed through a single leak at 2 different external spots so that you could simultaneously touch both. But we never know.
I’ll practice handling the case with 1 hand only so that I’m never exposed to a voltage diff through my heart.
Interesting cooling approach. Keep us posted on how that works out over time.
The front fin makes sense to me from a Wingfoil perspective - especially during the learning phase in helping keep the board going straight until up on foil.
I’m not so sure I would want that “feature” while
Efoiling. My concern is with nose touching the water when you are up to speed. If the water is flat and you are going straight and have a touchdown it wouldn’t affect much. However If you are in big close interval chop and are on an angle to the wave having the nose “grab” rather than be “slippery” might get interesting😀
I think I found the relevant parameters from the autocalibration from my VESC Tool phone app:
# Flipsky Inrunner Brushless DC 65121 Motor 130KV 3700W
Motor Resistance 36.1 mOhm
Motor Inductance 19.56 uH
Motor Flux Linkage 14.1 mWb
Current KP 0.0196
Current KI 36.10
Observer Gain 5.03
Hey,
Thanks for the detailed recipe.
I need it as assist only ( like foil frive) Do you think it is ok or maybe too strong?
Also do you think that soldering the batteries will hold? Cause i dont have equipment for spot welding.
It’s half the torque of its big brother 65161. So it’s not super strong and might work well for a foil assist setup. You can always add software limit if you need.
The real question is: isn’t this motor too heavy for a light foil assist system? Most people use outrunners for their foil assist.
Also do you think that soldering the batteries will hold?
I would not recommend soldering directly on the cells. On the positive side it can work fine, as the positive cap is thermally decoupled from the cell and quite easy to solver. But on the negative side, a lot of heat will be transferred within the cell. (damaging it, or worse…)
Just buy a spot welder, it’s super fun to use and once you have one, you’ll see plenty of opportunities to make your own battery pack for various projects