THX for answering and for you engagement! It´s the ESC oft the left motor and SRV. Don´t know why? I even changed the RX board and did flash a new version (for steering), both ESC got a new firmware, nothing helped. Finally disabled auto calibration of the ESC and throttle minimum above 1520 solve the problem. If you now switch of the TX both motor stop spinning and the right starts peeping (CAT/EM).
Is there a way to adjust the code to make the pwm outputs 1000 on the low end and 2000 on the high end? I am going to try a more expensive speed controller on my tow boogie, but this is in the notes from them…
“If the lower endpoint is above 1020 uS, the ESC will not arm. Similarly, if the receiver is outputting less than 1980 uS, you will not reach the full power range“
My min throttle in BLHeli is at 1530, so if I can’t change this I don’t think it will work because it is not manually programmable on this new speed controller.
Yes, you can go to the BREmote_Rx.h file and play around with the OCR1A, OCR1A multiplier value
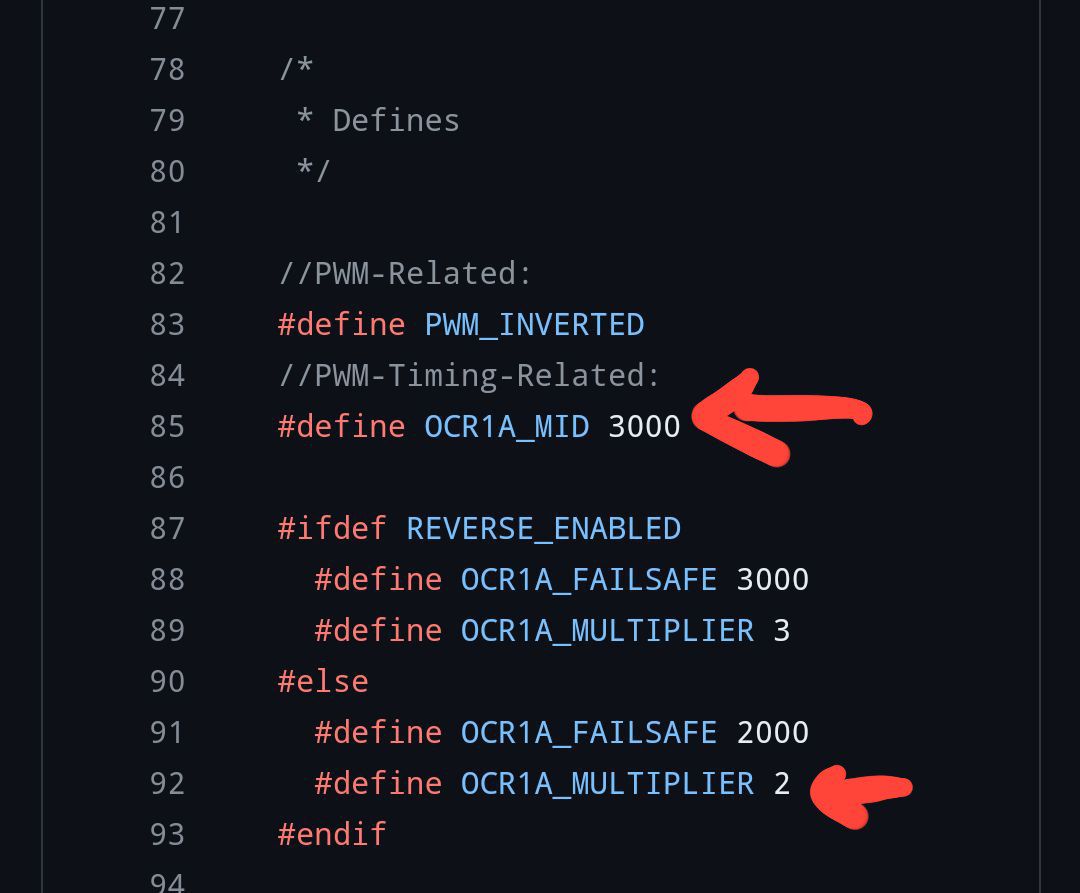
The OCR1A is always the time of the 0 throttle output in us*2, so to get to 1000, set it to 2000. Make sure to both change the OCR1A_MID and OCR1A_FAILSAFE to the same value.
The multiplier always needs to be a whole number. To get to 2000us full throttle, set to 3.
2 Likes
Thank you so much!! The BREmote is the best!
2 Likes
@ludwig_bre
I’m setting up my RX in combination with a VESC. But if I read correctly the PPM signal is (ofcourse) +5V and also used for powering the RX.
The VESC also connects over UART to the Bremote_Rx, but the pinheader of the Rx is labelled with a 3.3V, rx, tx and GND port.
Can I just connect over PPM and the rx, tx signals? leave the 3.3V unconnected?
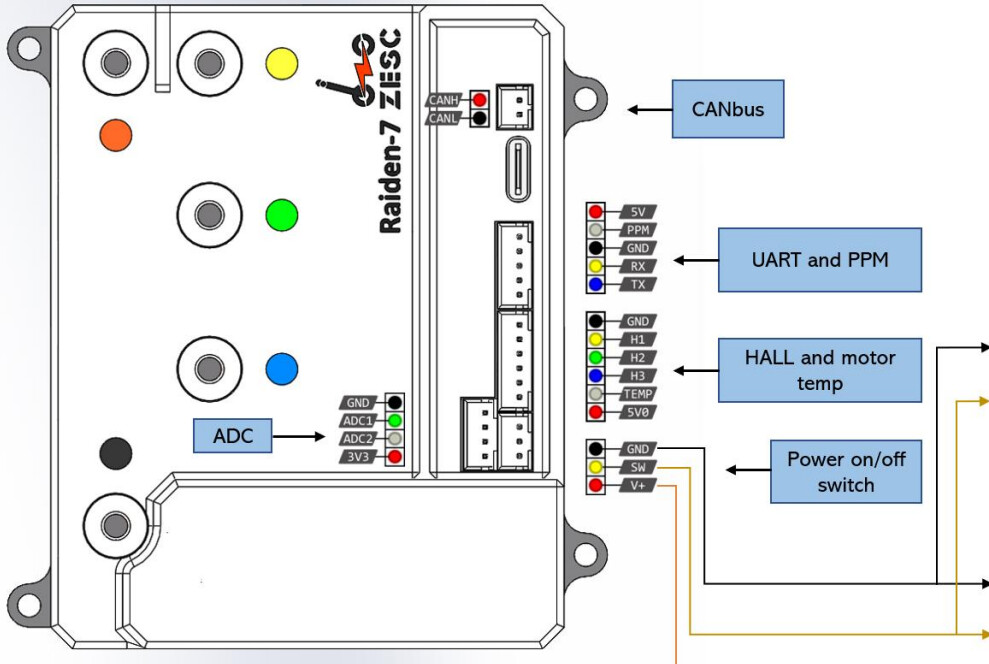
Yes, you can.
Btw be careful with the Raiden7, it seems to have some temperature and self-unsoldering problems…
https://foil.zone/t/raiden7-overheat-issues
I know… I’m in that topic ![]() I have improved the heattransfer from the fets, it seems to be OK now.
I have improved the heattransfer from the fets, it seems to be OK now.
2 Likes
I tried those settings and it didn’t work. Is there a way to see the pwm output on the serial monitor to adjust those min and max accordingly?
I used a different remote and receiver just to make sure it wasn’t something else and it worked perfectly. It’s a Maytech remote I have for testing.
Option 1: If you have any VESC laying around, connect to that and look at the Input Wizard, it shows the us of the incoming signal
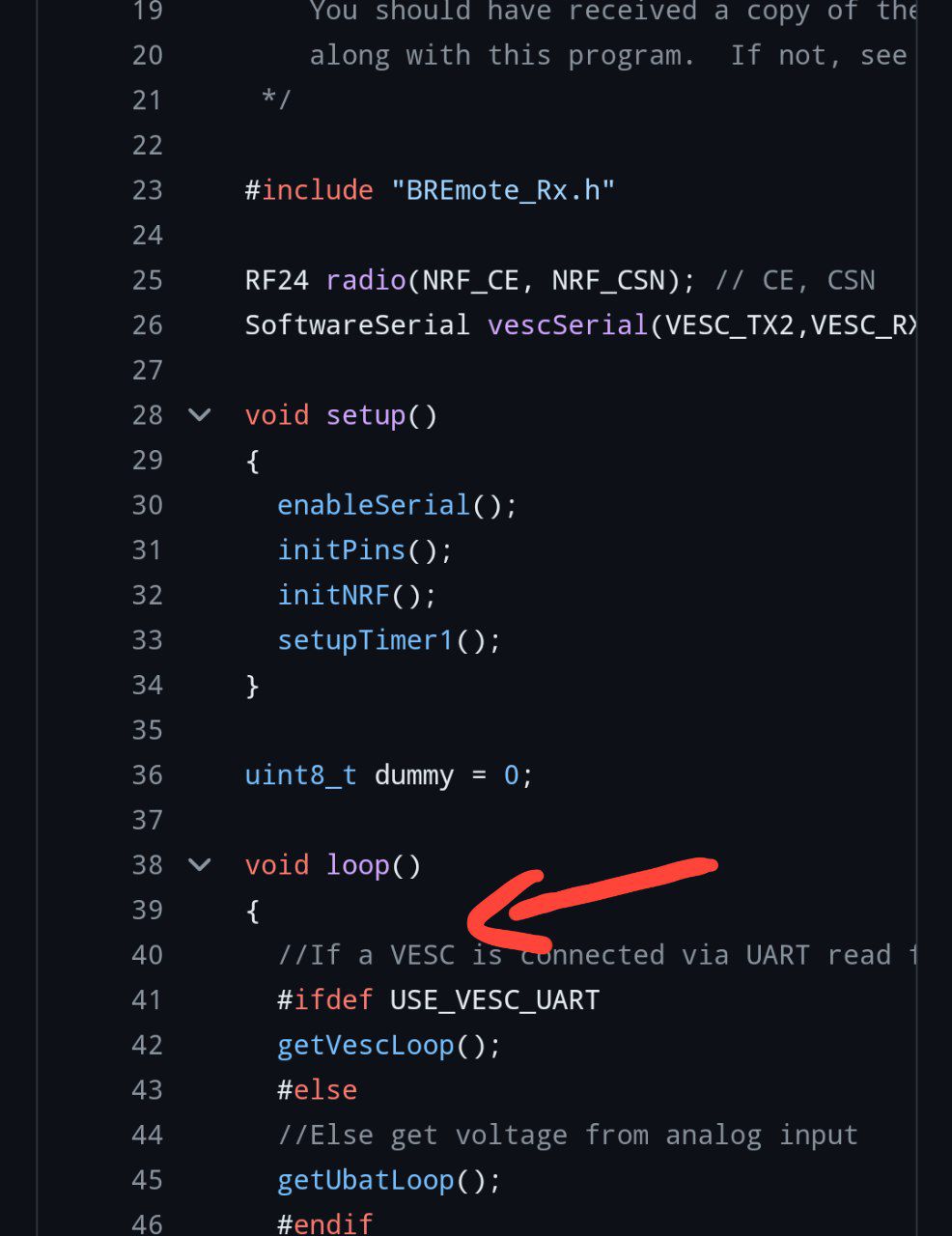
Option 2, in the Main Rx Programm, add a line to the loop
Serial.println(OCR1A/2);
1 Like
I will give those a shot and report back. Thank you!
Update: I checked the specs on the x-cross I use and it’s pwm and the BREmote works fine, so I’m gonna keep trying. If anyone has any thoughts please chime in.
Ok. I have tried everything and gotten good results to make it 1000 min and 2000 max on both the serial monitor and on the VESC tool.
I think the problem is the BREmote is using PPM and my speed controller takes PWM.
Any thoughts on how to convert this or am I just wrong?
I also have a flight controller if that would do anything. Havent used it, so research needed.
I do have a couple of these lying around, but never used them, so I’d have to research that unless someone has experience.
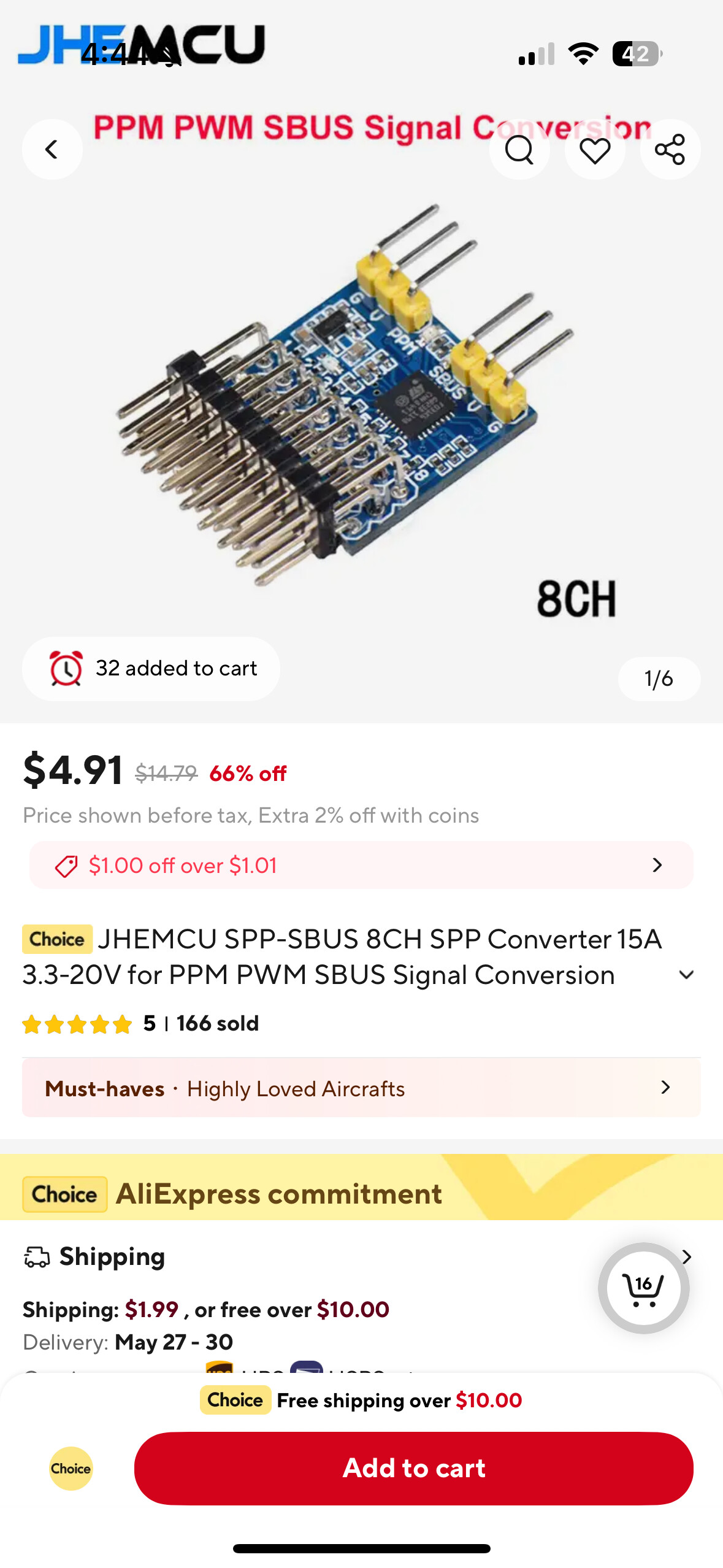
Just found this amazing item on AliExpress. Check it out! $4.91 66% Off | JHEMCU SPP-SBUS 8CH SPP Converter 15A 3.3-20V for PPM PWM SBUS Signal Conversion FLYSKY IA6B FRSKY X8R Receivers
https://a.aliexpress.com/_mNyzYwO
The only other thing could be the frequency of the signal…
Can you share the model or name of the ESC you have problems with?
Frequency is in the allowed range…
Can you try going a little lower with the OCR1A? So you are for sure below 1000us?
Have you tried the timing of the other remote on the vesc? Which numbers does it go from/to there? And the BREmote?
We run the same setup like Jesse (Flycolod X and Remote dual) and curious things still going on ![]()
Again our history of problems.
First everything runs perfectly in dry conditions. On the water the left motor was stronger than the right. So we changed both motors and now only one motor runs while the other ESC doesn’t arm any more. We finde out that we had to flash both ESC´s. Everything rund perfect but now a failsafe problem comes up. When losing the signal one ESC stopped while the left one starts with 50% throttle. We talked to Jesse and he told us to disable auto calibration in the ESC an set the throttle from 1520-2000. Without a signal both motors stops but one the right starts peeping. Anyway everything seemed to be fine and we had a lot fun of the water.
But later on we find out that within a range of 100-200m the connection gets lost. The curious thing is that again, when the signal of the Bremote is low, the right ESC goes into failsafe and the left ESC and throttle is still is aktive for an additional distance!? It´s it strange? The same behavior occurs when the battery is low and the voltage drops…
Is the PPM vs. PWM the reason?
AHHH, if found something out. Disabled REVERSE_ENABELED in TX und RX and you get 100% throttle way with 1520-2000! Activating cuts it to 50% and LP doesnt work!
Even with the version 1.7 after steering the left motor spins faster then the other, steering in the opposite way synchronizes the motors again. In failsafe both motors stopped but only the right starts beeping. Low signal causes right motor to stop and ESC disarms, left motor ist still running and steerable, reducing the distance and release throttle to O and the right ESC arms again! Sorry ![]()
There is no difference between PWM and PPM in this case. Technically all ESCs and eFoil Remotes use PWM, just some call it PPM or PWM
PPM means you have multiple channels on the same cable, wich is used in the RC Plane/Copter hobby
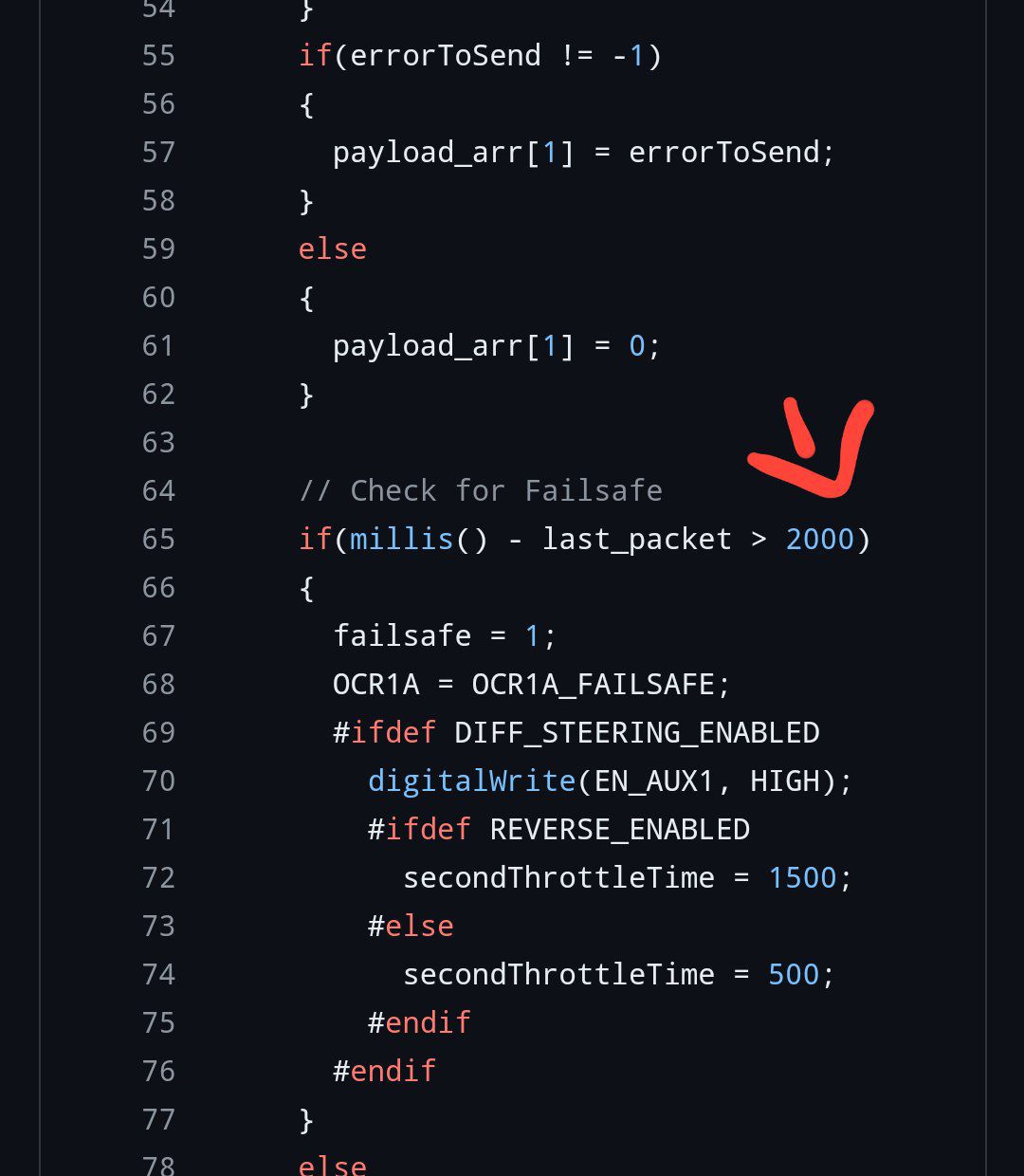
The one motor beeping and the other not is because one channel will stop sending signal at all, the other goes down to “idle” PWM
This is due to the “hack” of the 2nd motor output that was never intended to be one
The 1st channel allows another 2s of no signal before shutting off
If you want to change that, change >2000 to something like >100 in BREmote_Rx.ino, then the motors should stop at the same time
Which antenna do you use at which placement? Distance with LR remote should be way higher than 200m.
THX! Your support is awesome! We have to use the Maytech antenna with a long cable because our boogie has a full carbon fuselage. (we send you a video at sales@openfoil.com)

Understood. I recommend a long external antenna, like this: https://amzn.eu/d/07K8eFg
And maybe to clarify this, openfoil is the seller of the hardware, but I am not part of this company, nor am I working for them.
If you want to contact me, plase use the e-mail found on my website: lbre.de
2 Likes
I tried a bunch of different settings to get below 1000 and just above. I will hook up the Maytech and see what it’s getting and match accordingly. I’m gonna dig into the settings a bit more on the APD and see about disabling the auto detect and set the range manually like I do on the flycolor ESC.