Update: I checked the specs on the x-cross I use and it’s pwm and the BREmote works fine, so I’m gonna keep trying. If anyone has any thoughts please chime in.
Ok. I have tried everything and gotten good results to make it 1000 min and 2000 max on both the serial monitor and on the VESC tool.
I think the problem is the BREmote is using PPM and my speed controller takes PWM.
Any thoughts on how to convert this or am I just wrong?
I also have a flight controller if that would do anything. Havent used it, so research needed.
I do have a couple of these lying around, but never used them, so I’d have to research that unless someone has experience.
Just found this amazing item on AliExpress. Check it out! $4.91 66% Off | JHEMCU SPP-SBUS 8CH SPP Converter 15A 3.3-20V for PPM PWM SBUS Signal Conversion FLYSKY IA6B FRSKY X8R Receivers https://a.aliexpress.com/_mNyzYwO
Frequency is in the allowed range…
Can you try going a little lower with the OCR1A? So you are for sure below 1000us?
Have you tried the timing of the other remote on the vesc? Which numbers does it go from/to there? And the BREmote?
We run the same setup like Jesse (Flycolod X and Remote dual) and curious things still going on
Again our history of problems.
First everything runs perfectly in dry conditions. On the water the left motor was stronger than the right. So we changed both motors and now only one motor runs while the other ESC doesn’t arm any more. We finde out that we had to flash both ESC´s. Everything rund perfect but now a failsafe problem comes up. When losing the signal one ESC stopped while the left one starts with 50% throttle. We talked to Jesse and he told us to disable auto calibration in the ESC an set the throttle from 1520-2000. Without a signal both motors stops but one the right starts peeping. Anyway everything seemed to be fine and we had a lot fun of the water.
But later on we find out that within a range of 100-200m the connection gets lost. The curious thing is that again, when the signal of the Bremote is low, the right ESC goes into failsafe and the left ESC and throttle is still is aktive for an additional distance!? It´s it strange? The same behavior occurs when the battery is low and the voltage drops…
AHHH, if found something out. Disabled REVERSE_ENABELED in TX und RX and you get 100% throttle way with 1520-2000! Activating cuts it to 50% and LP doesnt work!
Even with the version 1.7 after steering the left motor spins faster then the other, steering in the opposite way synchronizes the motors again. In failsafe both motors stopped but only the right starts beeping. Low signal causes right motor to stop and ESC disarms, left motor ist still running and steerable, reducing the distance and release throttle to O and the right ESC arms again! Sorry
There is no difference between PWM and PPM in this case. Technically all ESCs and eFoil Remotes use PWM, just some call it PPM or PWM
PPM means you have multiple channels on the same cable, wich is used in the RC Plane/Copter hobby
The one motor beeping and the other not is because one channel will stop sending signal at all, the other goes down to “idle” PWM
This is due to the “hack” of the 2nd motor output that was never intended to be one
The 1st channel allows another 2s of no signal before shutting off
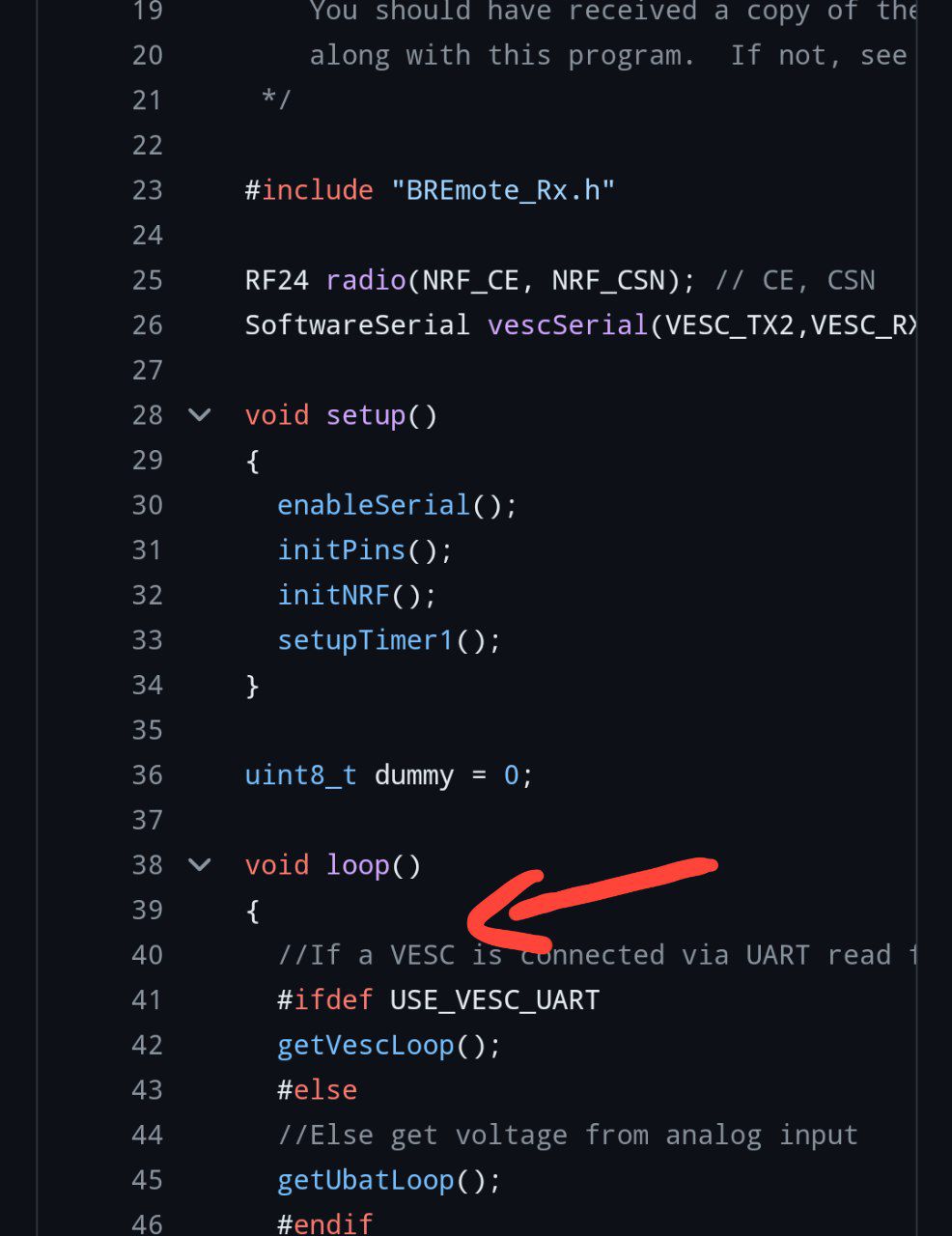
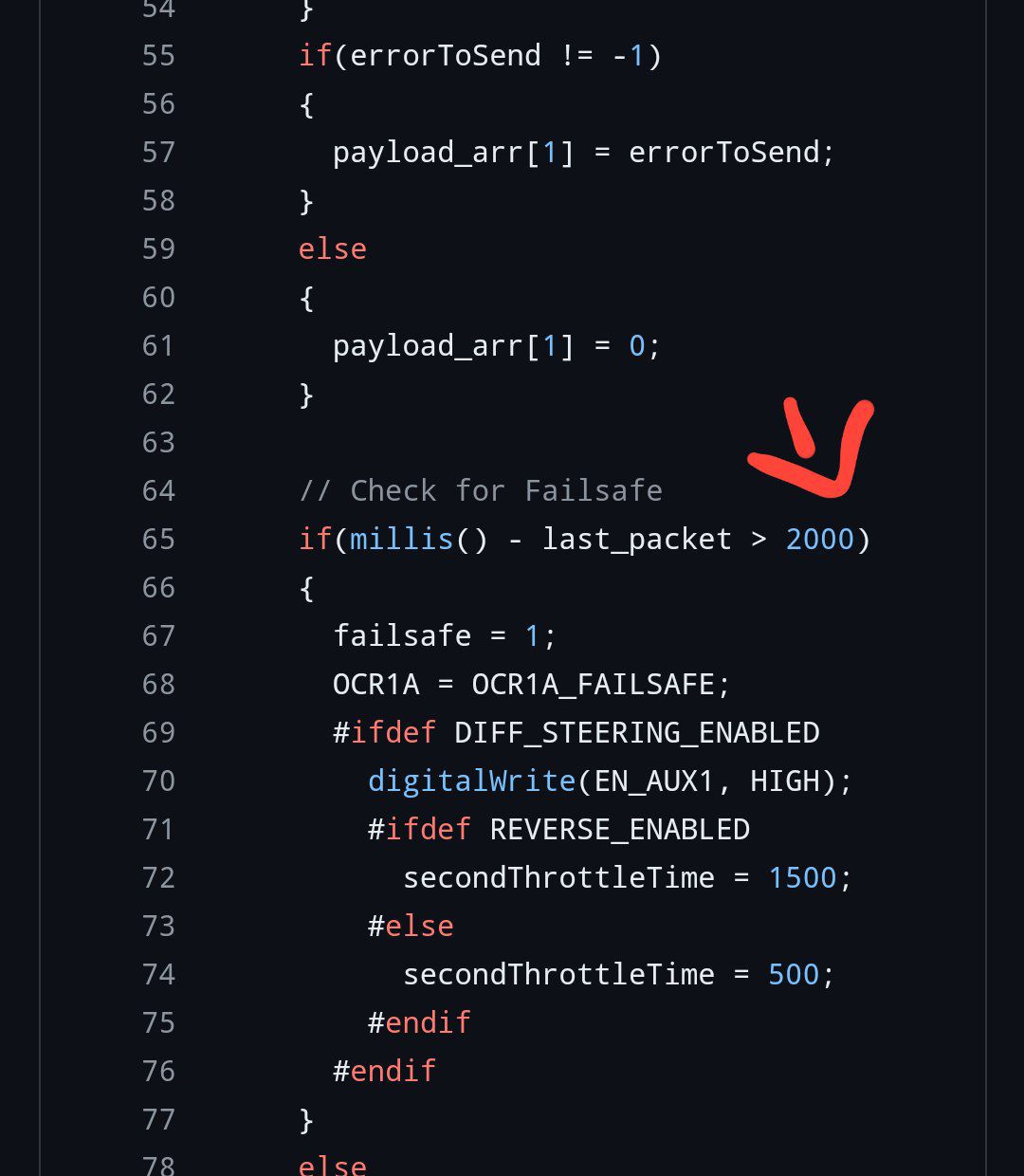
If you want to change that, change >2000 to something like >100 in BREmote_Rx.ino, then the motors should stop at the same time
Which antenna do you use at which placement? Distance with LR remote should be way higher than 200m.
THX! Your support is awesome! We have to use the Maytech antenna with a long cable because our boogie has a full carbon fuselage. (we send you a video at sales@openfoil.com)
And maybe to clarify this, openfoil is the seller of the hardware, but I am not part of this company, nor am I working for them.
If you want to contact me, plase use the e-mail found on my website: lbre.de
I tried a bunch of different settings to get below 1000 and just above. I will hook up the Maytech and see what it’s getting and match accordingly. I’m gonna dig into the settings a bit more on the APD and see about disabling the auto detect and set the range manually like I do on the flycolor ESC.
I have tried a bunch of different settings below and above 1000. The Maytech reads .99-1.0ms to 1.99-2.0ms in the VESC tool and I’ve made the BREmote match exactly that as well with no luck. I’ve also disabled the auto detect endpoints in the APD software with no luck. I am going to send APD an email to see if they have any ideas as well.
It’s giving me the “invalid signal tones” beeps when I try and use the BREmote.
Also, the stock OCR1A_Mid is at 3000 and failsafe at 2000. If I have the MID set to 2800 does the failsafe need to correspond at 1800?
Set the mid and failsafe to the same value. Maybe this might also solve the problem
But with mid at 2800, you will still have 1.4ms at 0 throttle?
In theory both mid and failsafe at 2000 should be 1.0ms at 0 throttle
I tried that, but without values both at 2000 the VESC tool shows like .500-.600 to 1500-1600. I tried everything from 1500 up to 3000 with the APD on both mid and failsafe with no success
Thats odd, do you have reverse enabled?
If so, lets take as a first step a “clean” BREmote setup, no reverse, no steering, just leave the Rx at default settings except the OCR… stuff
If that does not work, you can also go to “System” and change the PWM frequency to 0x3FFF
I haven’t had a chance to try anything since @ludwig_bre last suggestion, but I did receive an email back from APD and this was their response about what might be causing the issue. Their customer service is really great!
“Thanks for reaching out!
This is likely due to a low drive-strength on your receiver. The 200F3V2 uses an opto-isolator which requires more current than some signal generators can provide.
This can be fixed by wiring the “Signal VCC” pin on the ESC with the same voltage as your receivers logic voltage. So if it is a 3.3V logic level receiver, you will want to wire 3.3V to the “Signal VCC” pin; if the receiver uses 5V logic level, then wire 5V to the signal VCC pin”
IT WORKS!!! So, as per APD suggestions I added a 5v to the signal vcc on the ESC and it works perfect. I had to set the OCR1A mid and fail safe to 2000 and multiplier to 3.
So, before I try the second output, is it 3.3v or 5 v logic? I assume 5v, but I know we run the resistor on that one.