Hi everyone,
I am happy to inform you that all versions of the open-source remote BREmote on openfoil.com are back in stock. With the promo code: BREmote15% you can get a discount on your purchase. Happy shopping.
5 Likes
Hi together,
First of all: The new 1.7 firmware is in GitHub now: LINK
Changes:
- Tx:
- THR_TO_PWRUP: Remote can be set to only turn on when throttle is pressed (more robust to unwanted turn-on)
- REVERSE: Instead of 10 forward gears, there is a forward and reverse gear
- DONT_SEND_IDLE: Remote will stop sending packets when trigger is not pressed (multiple remotes can be used with one Rx, e.g. for sharing a tow boogie)
- Rx:
- Diff. Steering
- Calibration:
- Added new paramter for “THR_TO_PWRUP” function
I also made a video with instructions how to configure your remote correctly:

16 Likes
They are some great updates. Thanks.
3 Likes
Great job! Please add a center adjustment for two motor tow boogies, than it would be perfect ![]()
What exactly is the use of this feature?
By default both ESCs get the same signal, so the motors will spin the same speed if the ESC is calibrated correctly.
You wish to give one motor a higher signal? In absolute terms, so just add a fixed amount… or proportional? So at low throttle less is added than at high throttle?
We have serious issues getting both motors synchronized especially while low RPM. But we think one of our motor causes the problem, today we dismounted them and we are going to use two totally new 6384.
Anyway a trim function with the toggle would be wonderful ![]() But even a trim option in the software would help. Starting point of the motors is the main issue I think. Two different throttle curves would be perfect! So you can define starting and some expo etc. Maybe 5 points 0-25-50-75-100. this way an individual configuration would be possible. 0-33-66-85-100 for example….
But even a trim option in the software would help. Starting point of the motors is the main issue I think. Two different throttle curves would be perfect! So you can define starting and some expo etc. Maybe 5 points 0-25-50-75-100. this way an individual configuration would be possible. 0-33-66-85-100 for example….
1 Like
Understood, I will think how I can implement this…
For synchronizing, if you have a VESC for control I would also recommend to set it to Duty cycle control rather than Current control.
1 Like
For the tow boogie many of us prefer two flycolor X-Cross ESC´s, much better performance and less configuration needed. These ESC are made for drones and RC models, that´s the reason why the specific information for the ESC is not saved in the ESC itself and usually comes from the transmitter, like throttle curve, etc.
Important safety issue (@ludwig_bre)
After having problems with the throttle synchronization of mx tow Boogie (6384*2 with two Flycvoller X Cross 160A) i fixed the problem with your advise here in the forum and with the help from @Jesserosco by wiring the GND correctly with two BEC. Everything is fine, but when you turn of the the TX the left motor starts spinning. There is a wrong failsafe!!! That’s dangerous…
@Jesserosco told me to with of auto calibration in the ESC Setup and prog min 1520 to max 2000. That solves the problem! You can switch of the TX and both motors are stopping with a warning peep every second. The one thing left is, that with 1520 min your throttle begins in the middle of the remote tripper.
So check your failsafe and switch of the TX. The best safety on water is to switch of the boogie by pulling the TX under water!
How did you wire the GND correctly with two BECs? Even with two ESCs you still have just one bre receiver to supply with 5V. What does the second BEC supply?
In two ESC situation I would imagine that you share the same GND but still having one BEC to supply the receiver with 5V.
Sorry if this is a stupid question. I want to avoid the same issue. Thanks
If the ESCs don’t have integrated BECs, the Rx ideally needs one BEC each to generate the PWM signals for each of the ESCs.
Why? The ESCs main supply wires are both connected to the same GND at the battery. When they start to draw current to drive the motor, current in the supply wire will make these GNDs float or drop differently between both ESCs. Not a problem for the supply/operation of the single one of them. BUT: If you also connect the GNDs of the PWM signal wires, as they work at low voltage levels and therefore can be disturbed easily, the shifting of the GNDs may interfere with the PWM signal, causing one of the ESCs to not register the signal correctly and go to failsafe…
So best practice is to have on BEC per ESC and keep the GNDs separated on PWM side.
1 Like
That is definitely not intended behavior
The Rx will kill the PWM signals / set them to 0 throttle of both motors as soon as the connection to the TX is broken
Not sure why the ESC of one motor starts to spin in this case… Which output is the left motor connected to in your case? 1st (SRV) or 2nd (CAT/EMI)?
And yes, with any system always check your failsafe before going to the water!!
THX for answering and for you engagement! It´s the ESC oft the left motor and SRV. Don´t know why? I even changed the RX board and did flash a new version (for steering), both ESC got a new firmware, nothing helped. Finally disabled auto calibration of the ESC and throttle minimum above 1520 solve the problem. If you now switch of the TX both motor stop spinning and the right starts peeping (CAT/EM).
Is there a way to adjust the code to make the pwm outputs 1000 on the low end and 2000 on the high end? I am going to try a more expensive speed controller on my tow boogie, but this is in the notes from them…
“If the lower endpoint is above 1020 uS, the ESC will not arm. Similarly, if the receiver is outputting less than 1980 uS, you will not reach the full power range“
My min throttle in BLHeli is at 1530, so if I can’t change this I don’t think it will work because it is not manually programmable on this new speed controller.
Yes, you can go to the BREmote_Rx.h file and play around with the OCR1A, OCR1A multiplier value
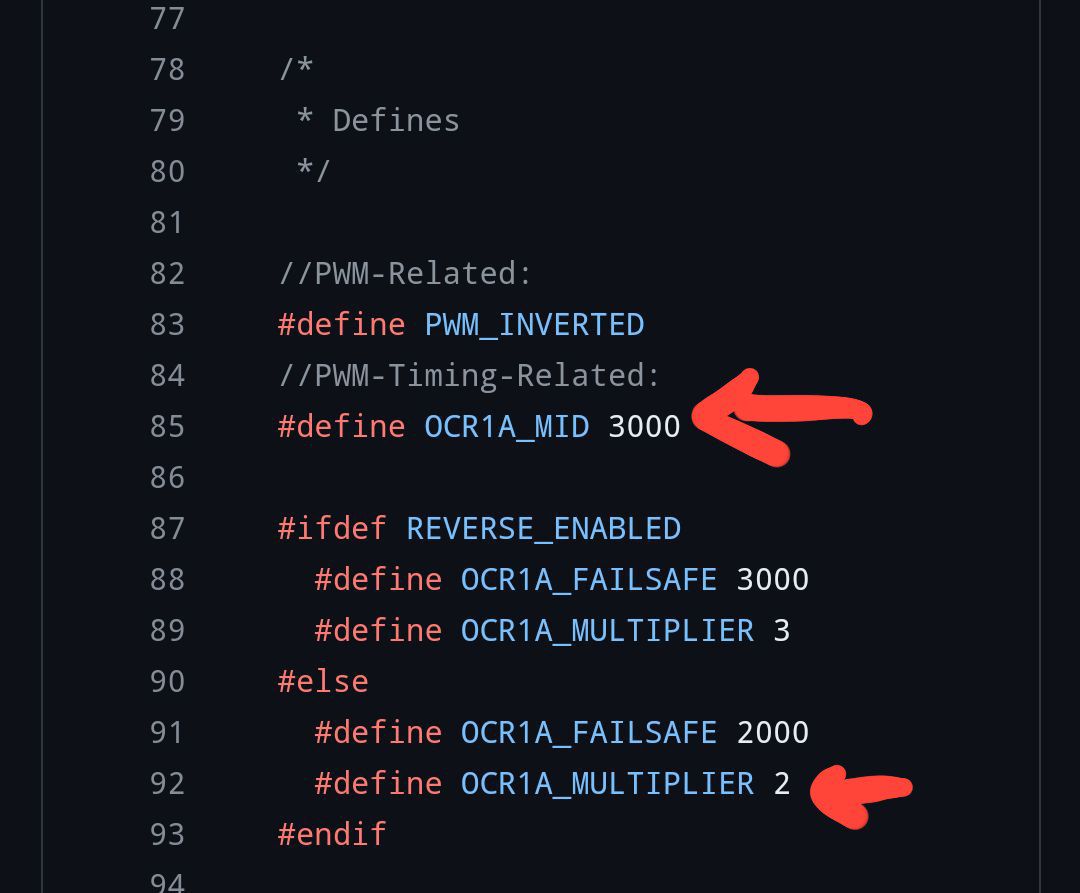
The OCR1A is always the time of the 0 throttle output in us*2, so to get to 1000, set it to 2000. Make sure to both change the OCR1A_MID and OCR1A_FAILSAFE to the same value.
The multiplier always needs to be a whole number. To get to 2000us full throttle, set to 3.
2 Likes
Thank you so much!! The BREmote is the best!
2 Likes
@ludwig_bre
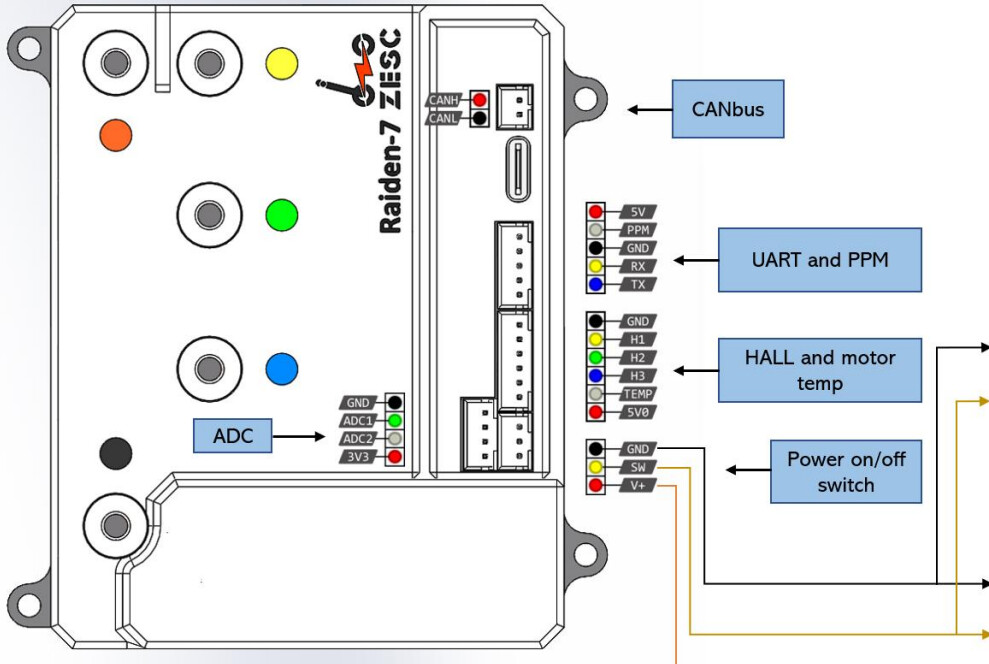
I’m setting up my RX in combination with a VESC. But if I read correctly the PPM signal is (ofcourse) +5V and also used for powering the RX.
The VESC also connects over UART to the Bremote_Rx, but the pinheader of the Rx is labelled with a 3.3V, rx, tx and GND port.
Can I just connect over PPM and the rx, tx signals? leave the 3.3V unconnected?
Yes, you can.
Btw be careful with the Raiden7, it seems to have some temperature and self-unsoldering problems…
https://foil.zone/t/raiden7-overheat-issues
I know… I’m in that topic ![]() I have improved the heattransfer from the fets, it seems to be OK now.
I have improved the heattransfer from the fets, it seems to be OK now.
2 Likes