Both motor outputs are 5V, but both are low strength indeed. Happy it works! ![]()
1 Like
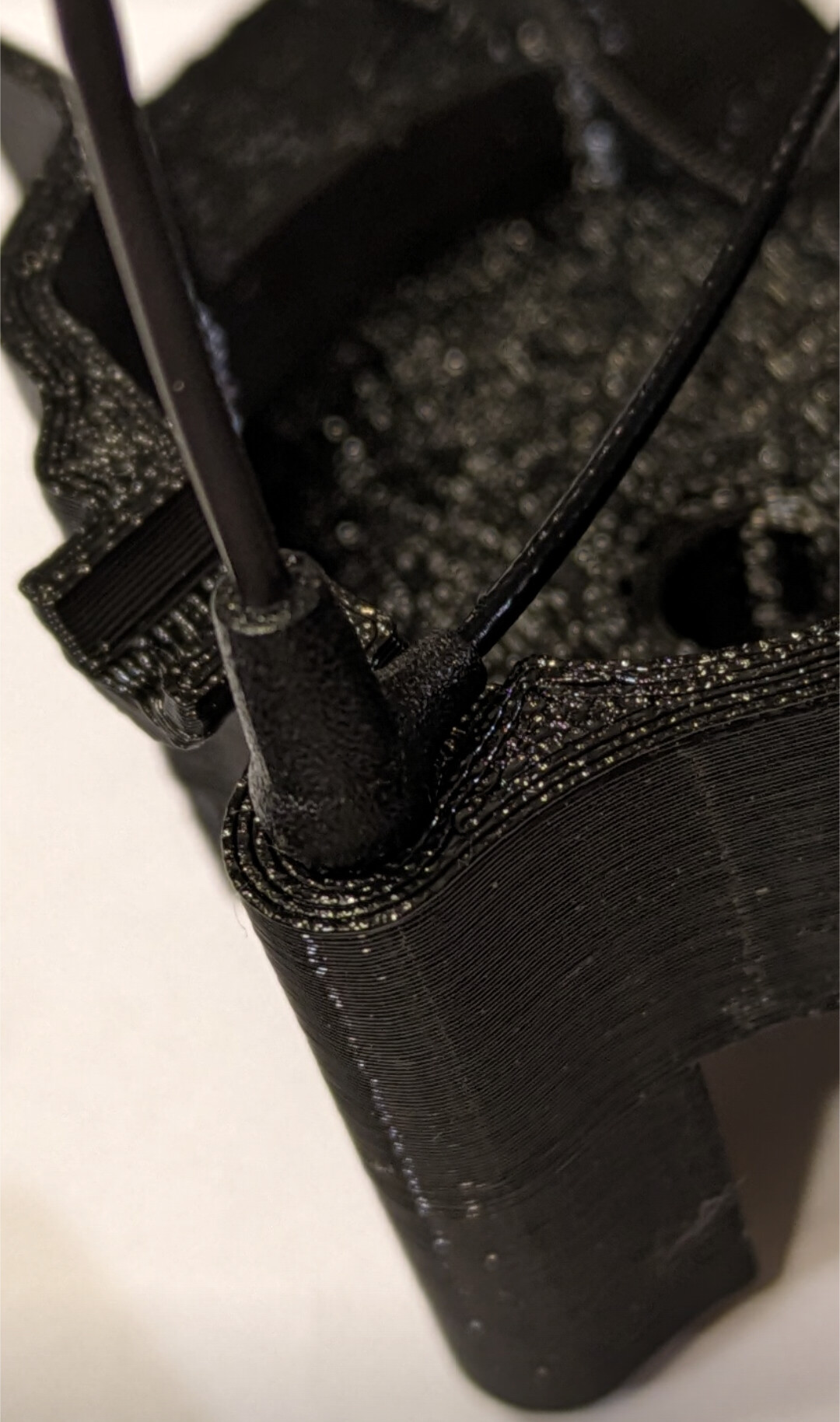
Thanks @ludwig_bre & @JasminRM I’m very excited to make this. I have the long range kit and the printed parts, but the T-junction cover on the external antenna is too large for the housing. I’ll probably pull apart and re-solder the junction. Any other suggestions for a way around this?
Hi,
The fastest way to solve this is to enlarge the hole with a 5mm drill bit. Push it in 5mm depth and you’re done. Unfortunately, our suppliers from Asia are not consistent in the shape of this antenna and each delivery is slightly different from the last.
All the best, Jasmin RM
3 Likes
I can’t get the second speed controller to work with differential steering. Is there another value I need to change?
Can you check with the VESC what the 2nd output timing is?
1 Like
On the one that works it’s .65 - 1.65ms and the one that doesn’t work is .70 - 1.7ms according to the VESC tool.
According to the beep I get from the speed controller it’s
“ Waiting for signal tone, lower pitch “
Both speed controllers work with the primary signal. I tried them independently.
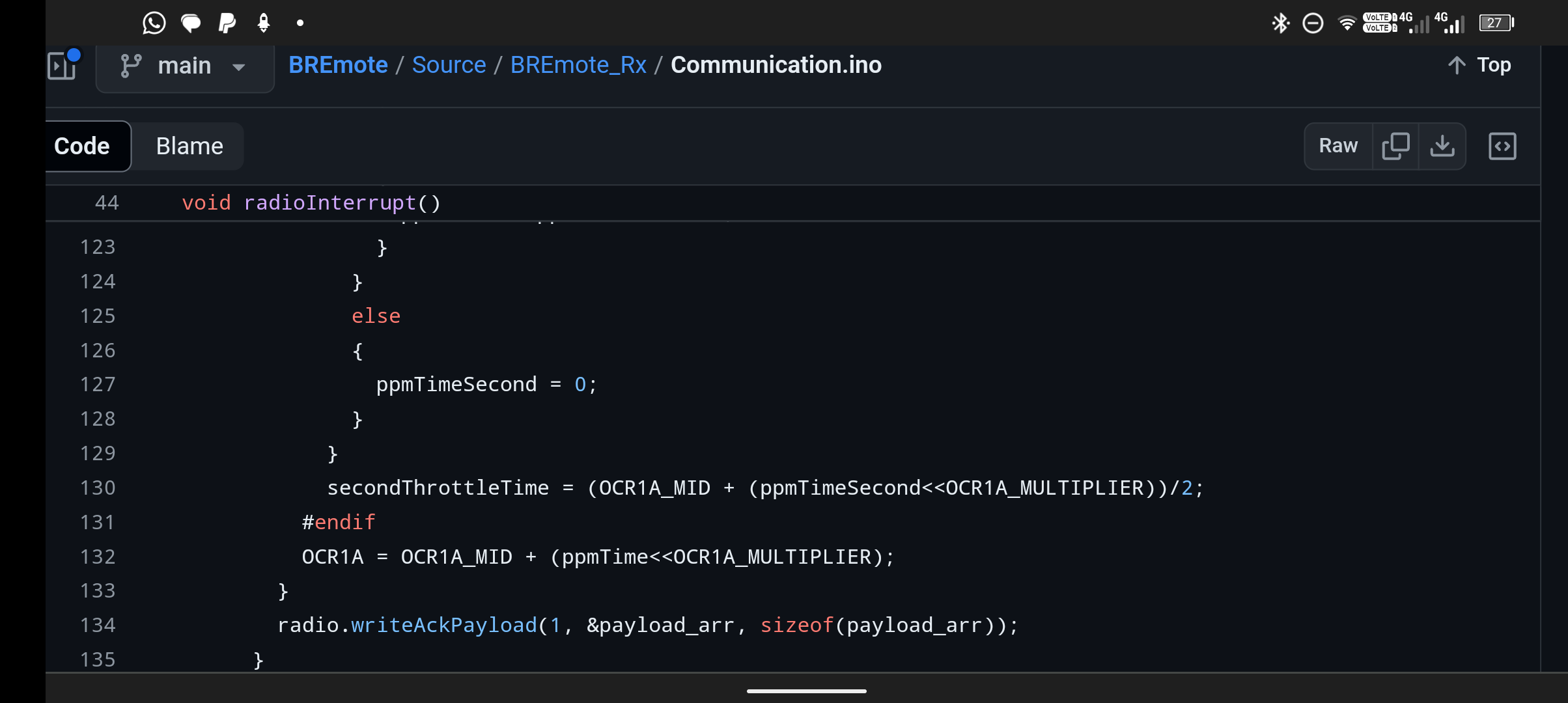
Replace line 130 of “Communication.ino” with
secondThrottleTime = ((OCR1A_MID + (ppmTimeSecond<<OCR1A_MULTIPLIER))/2)-50;
The “-50” in the end can be tuned by you so the signals match exactly
1 Like
I only had a second to play with it, but I tried -25,-50,-75 and -100 with no luck. I’ll hook it up to the VESC when I get more time to try and match the numbers.
Ok, I matched everything exactly and still have the same issue. I checked everything from +300 to -300 in increments of 10. I double checked all the wiring and voltages and everything is solid.
Hmm… can you draw a quick sketch how exactly you wired this 2nd output, including Bec and all the components?
It’s a very crude drawing, but hopefully enough to work with. It gets a good signal through the VESC on the 2nd output. I might replace the 10k resistor just to try.
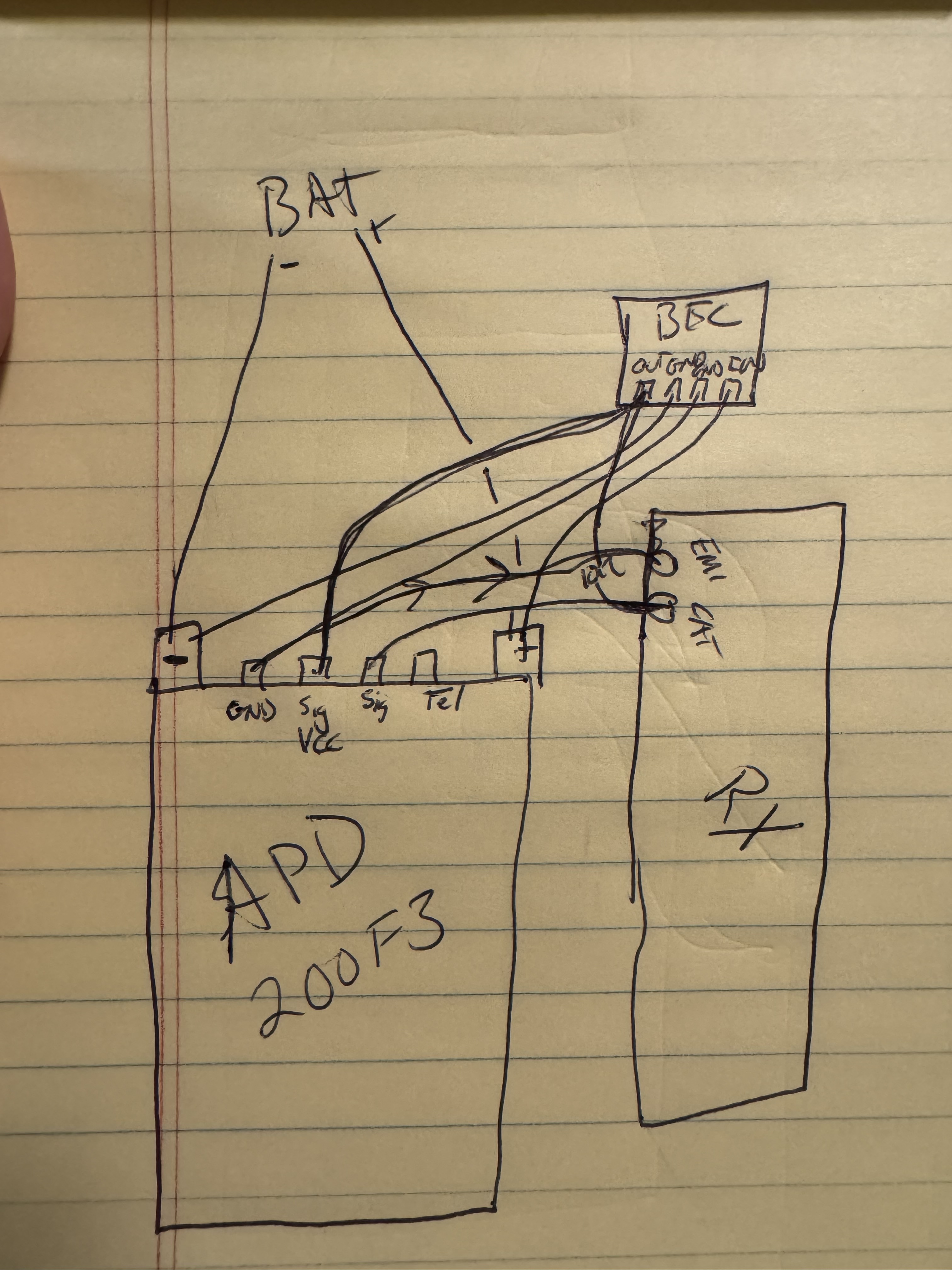
Schematic looks good.
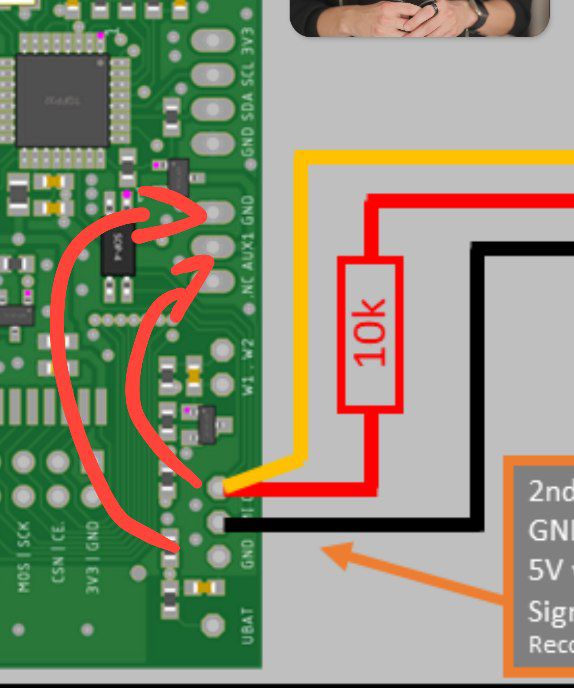
Another thing you can try is to use another output
For that, connected the black wire currently connected to “EMI” to the “GND” pad and resistor and signal wire currently connected to “CAT” to “AUX1”
Then in line 108 and 109 of “BREmote.h”
Replace with
#define EN_AUX1 A1
#define EN_AUX2 A2
Basically swap A1 and A2
1 Like
That did the trick!! It works now.
4 Likes
Hi everyone,
Is there a feature on Bremote software to set the “latency” when you lose the signal ?
I use the Maytech remote this days and this latency is too much. When my tow boogie nose dive in the chop, it goes 1 meter deep because the motors still push during 1.5 sec🤣
Cheers
Yes, in BREmote_Rx.ino, in line 65, change the default 2000 (milliseconds) to the desired value.
2 Likes
So I finally tried the new APD speed controllers and I think I’m gonna have to play around with the numbers cause I don’t think I was maxing out the capabilities.
The big thing I noticed was the turning was not nearly as crisp as it normally is, so what do I need to adjust to get that back?
You can try to bump up the #define STEER_AMOUNT in line 99 of BREmote_Rx.h
1 Like
This simple post to thanks so much @ludwig_bre and Jasmin from https://openfoil.com/
I finally find time to update my Efoil from Flipsky vx3 to bRemote. And I am so so happy.
- throttle is so so sweet butter
- throttle is precise
- when it s cold, accelerate is easy for your finger (imagine with glove in winter!)
I am super fan and can only recommand one thing to all user of flipsky and maytech Rx (I have one too) => try and you will adopt it ! The main issue with vx3 flipsky and maytech is your need to push hard (especially very hard for Maytech) spring are too strong to my opinion (despite this, some users has reported springs breaks)
I want to add a very very important thing:
- it s more more easy to me to go on foil because it s more precise so when sea is choppy, you have more control. Gear is a game changer
Again @ludwig_bre congrats to you ! ![]()
![]()
![]()
![]()

6 Likes
@kkolli WOW! That boogie looks awesome! Can you take 100 pics from every angle inside and out? I’m guessing it rights it’s self pretty quick ? What did you do for keeping it water tight?
I have heard a couple people have had this issue with the differential steering and I have the same issue. For some reason the second PWM output (one with the 10k resistor) loses signal before the main PWM signal.
Any thoughts on why the range is further on the main PWM? I will also get E4 when I lose the second signal, but it will still do circles on the one motor.