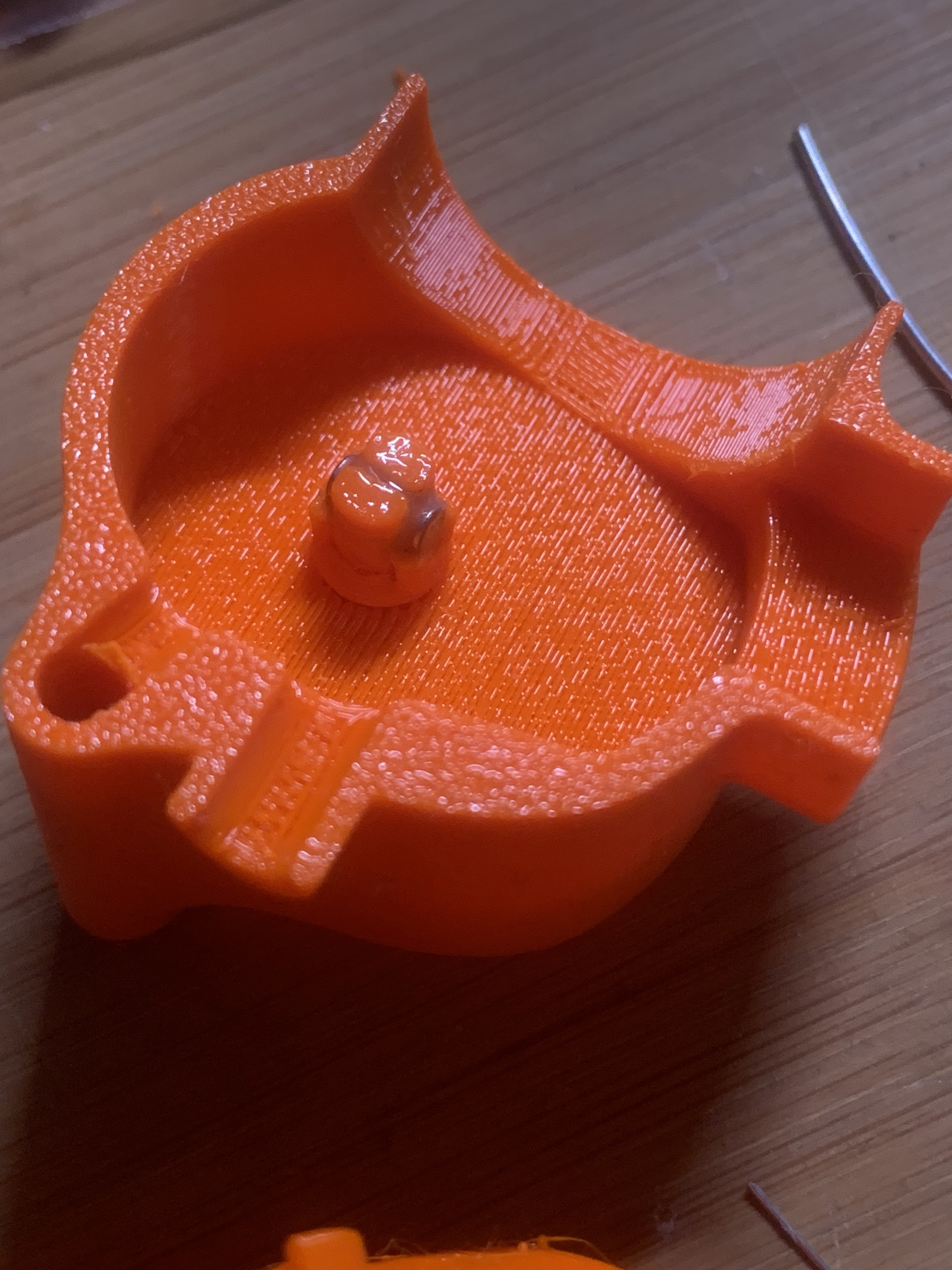
[EDIT] just solve my issue removing the center plastic blob with scalpel

Issue solved ![]()
Ok, everything works perfectly, all that’s left is to get into the water!!!
Hey @ludwig_bre,
I’m almost done making a coffin style faux drive, I plan on potting all the electronics which got me thinking about ability to change RX settings in the future.
I have this ESP32 thats got integrated BLE. Would it be possible to connect up to my RX permanently and pot the whole lot so I can change stuff later without USB?
My board is a SEED Studio XIAO-ESP32-C3.
Really hope this is possible.
Thanks Ludwig.
@ludwig_bre - simple question - for a Tow - only ‘DIFF_STEERING_ENABLED’ must be actiavted ? For PWM, only GND and Signal is necessary so why add the resistor in, this case? Must I connect the 5v from each VESC to the 5V of each side of the Rx ?
I will be using 2 vesc ( 1 per motor) - I suppose I define ’ #define USE_VESC_UART’ to get voltage from Master Vesc. The 2 VESC will be connected through CAN bus but is it usefull ? (probably out of scope of bRemote but I need it for my logger)
Thanks for your help !
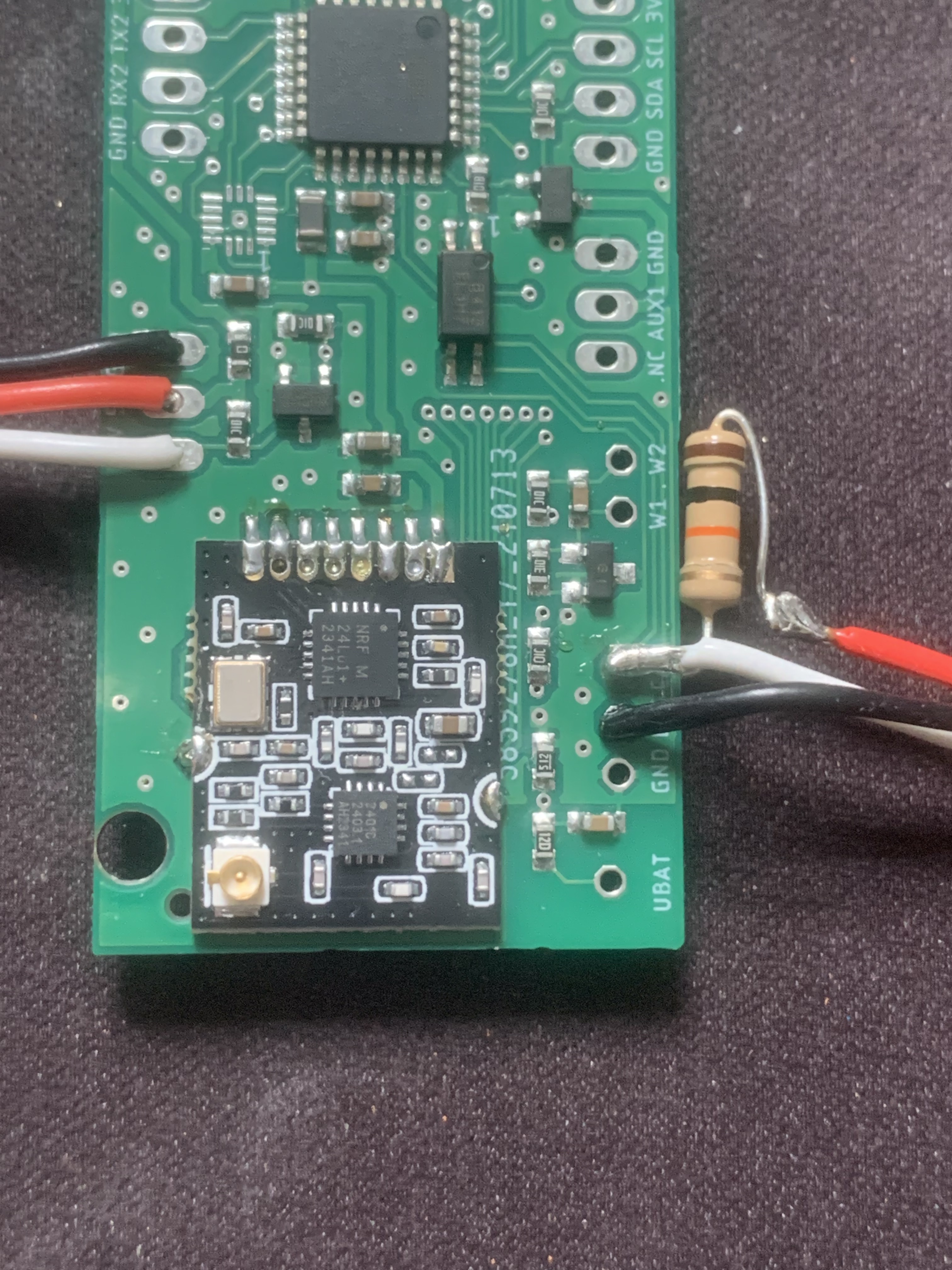
Yes, I the Rx diff steering enabled and in the Tx steering enabled. The 2nd servo output was never intended to be one - that’s why the resistor is needed. Both VESCs need to be connected with all 3 wires, 5V Sig and GND
Yes in this case connect UART of the master vesc too and you can read out voltage and temperature. The CAN to the 2nd vesc won’t hurt but also won’t bring any additional information
Probably possible but you will need to find some code for the ESP to act as a UART programmer… I have never tried that
Easier would be to use the same connector like on the Tx to get the USB wires outside
super thanks for clarifiaction ! (you can use my photo of servo female connector on your github if you want)
Thanks Ludwig,
Im going to give it a try although your solution does sound easier sure, I just want to be cool with a bluetooth connection since I already have the board.
Would I just solder to the uart RX/TX /5v/Gnd pads?
No, the UART Pads are the 2nd UART
For programming you need the primary UART, specifically Rx, TX and DTR (reset)
To access them you will need to unsolder the USB2UART IC (the long one next to the USB port)
You may check this tutorial for BT programming in general:
hi, for the LR version, I printed part from last release of github repo (1.7). Parts doesn’t seem to be the same as tbe part your share in this thread. I find curious alignement if i compare with my first bRemote “standard” range.
[EDIT]: I find in this thread the step file. Must I re-print all the parts or some of them are idenitifical with parts from github repo ?
I finally reprint parts for Long Range from this thread (the step file).
Here some pics:
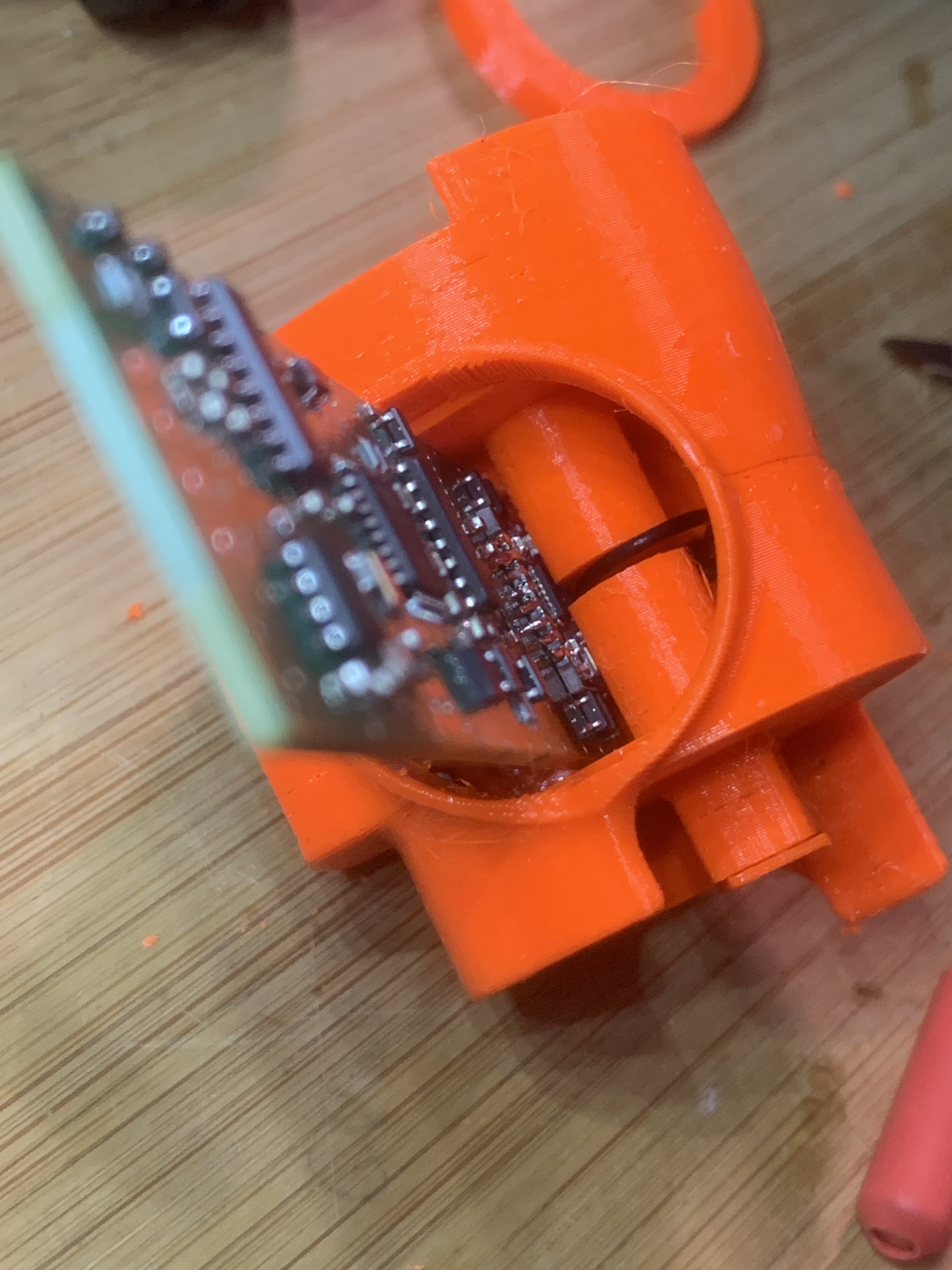
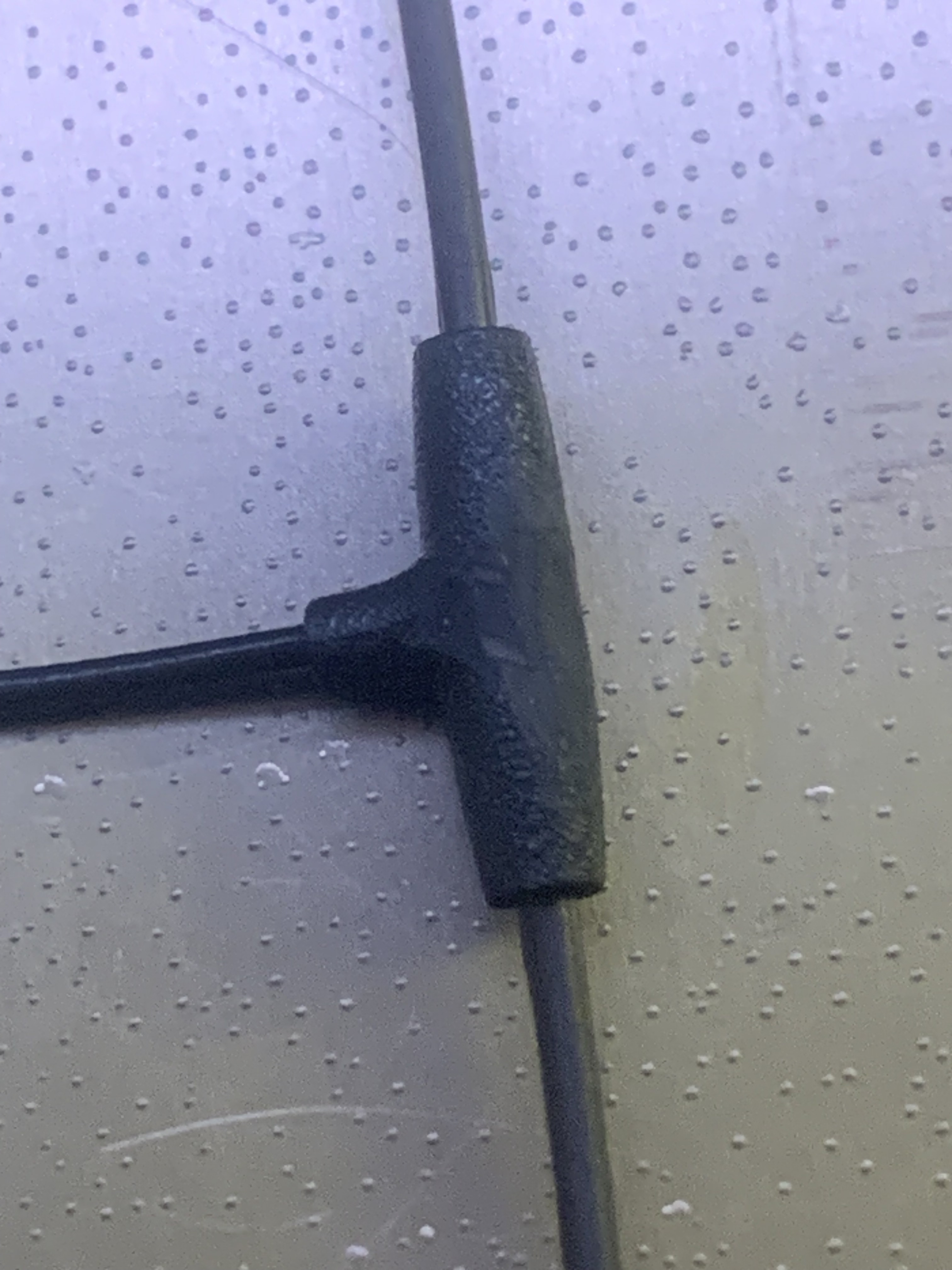
@ludwig_bre I didn’t find advice about Ufl internal antenna wire management so I share how I done this ( support must be well remove first to have enough space)
Looks good, please also make sure to put a dab of hot glue on the UFL connector to protect it from the foam.
Oups! Too late. I ask myself the question but already mesured on Rc plane that hot glue on ufl connector increase resistance. Neoprene or similar is better. Here I will see what happen without anything ! ![]()
Hi Ludwig. Seems the new part from last design for LR version is not as tight adjusted than the « classic » version. When I slowly push after mixing the foam A+B, foam goes on the side on not only inside the remote.
Not sure what happen but I turn for 15 sec and immediately push the part. Result is a fiasco and I need to reprint and restart the Bremote LR. (I had zero issue with my first bRemote for this part of the process)
I would like to buy some polyurethane foam bi component here in France but it s really hard to find in small volume. Any advice ?
Hmm sorry to hear that. I think it’s the same dimension for the plunger part, sometimes the 3d printing tolerances are a problem (a bit of elephant foot helps)
The foam is hard to get anywhere at the moment, Jasmin can provide you with a new syringe, just mail him ![]()
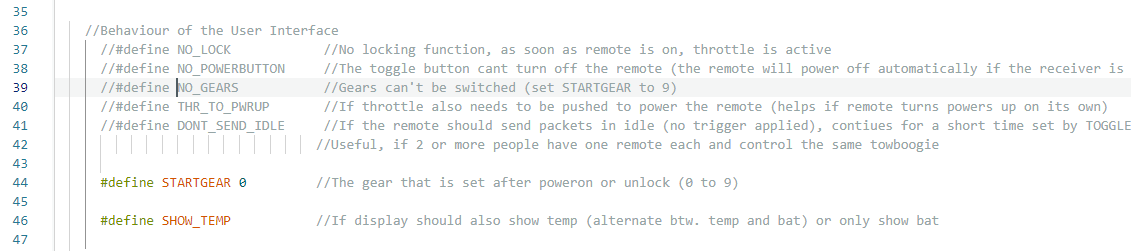
Do you know guys if it’s possible to use the no gear function with lower gear than 9.
I am with 140 kV motors and 12S, it’s a bit to much power !
Yes. Uncomment no gears and then change the line with start gear to whatever you want it to be. I can’t remember what line it is, but it is all in the TX shared.config file.
Hello,
You can buy everything at openfoil.com . Send me what you need via DM and I’ll prepare a link for payment. Best regards, JasminRM