Is there any bremote version with reverse mode? Like maytech and vx3 from flipsky. I love to use it, to bring the board automaticly back to me after falling.
Check the shared config - there you can enable reverse mode
Make sure to update both Rx and TX with the reverse mode enabled and recalibrate the ESC for the new signal
Thank you, is there also a 3D Step file available with reverse trigger?
Its the same physical remote, just with a reverse gear in software
I mean a housing looking similar to maytech or vx3. With one trigger forward and one trigger on the top for backward. I saw some new ones from you adapted to power tools grips. Something like that with extra trigger for backward I thought about.
At the moment an additional, physical reverse trigger is not planned.
I’m troubleshooting a problem that may be related to the differential steering failsafe discussed Around May 19, but not too sure I understand. I’m not getting equal rotation. It was originally quite bad (was getting nothing at all on one motor at L0, and only just spinning at L1. I replaced the 10k resistor which did make a good improvement because I think there was a connection issue there, but is it expected behavior for the motors, especially at lower power levels, to not be equal? The lower power is from the 10k resistor side. I’ve eliminated other possibilities by swapping phase wire connectors over and also swapped ESC leads and everything is consistent with the 10k side having less power, or at least starting later than the other side. I haven’t been able to test in the water but I can this weekend. Here is video demonstrating this. https://photos.app.goo.gl/Dis6aBHPkp31GjNe6
Did you calibrate both ESCs to the respective outputs on the receiver?
Due to the way the V1 generates the pwm signal for motor 1 and 2 in a different way, both the 1st and 2nd ESC need to be calibrated to their channels.
Alternatively you could change Line 95 in BREmote_Rx.h
#define STEER_LOWEND 950
If the motor on the Emi/cat output is starting later/going slower, increase this value and if it’s starting earlier decrease this value
1 Like
Thanks, no I didn’t calibrate, I just copied the ESC settings that @Jesserosco shared for the Flycolour x-cross and applied to both ESCs, but reversed the motor on one of them. I’ll do that.
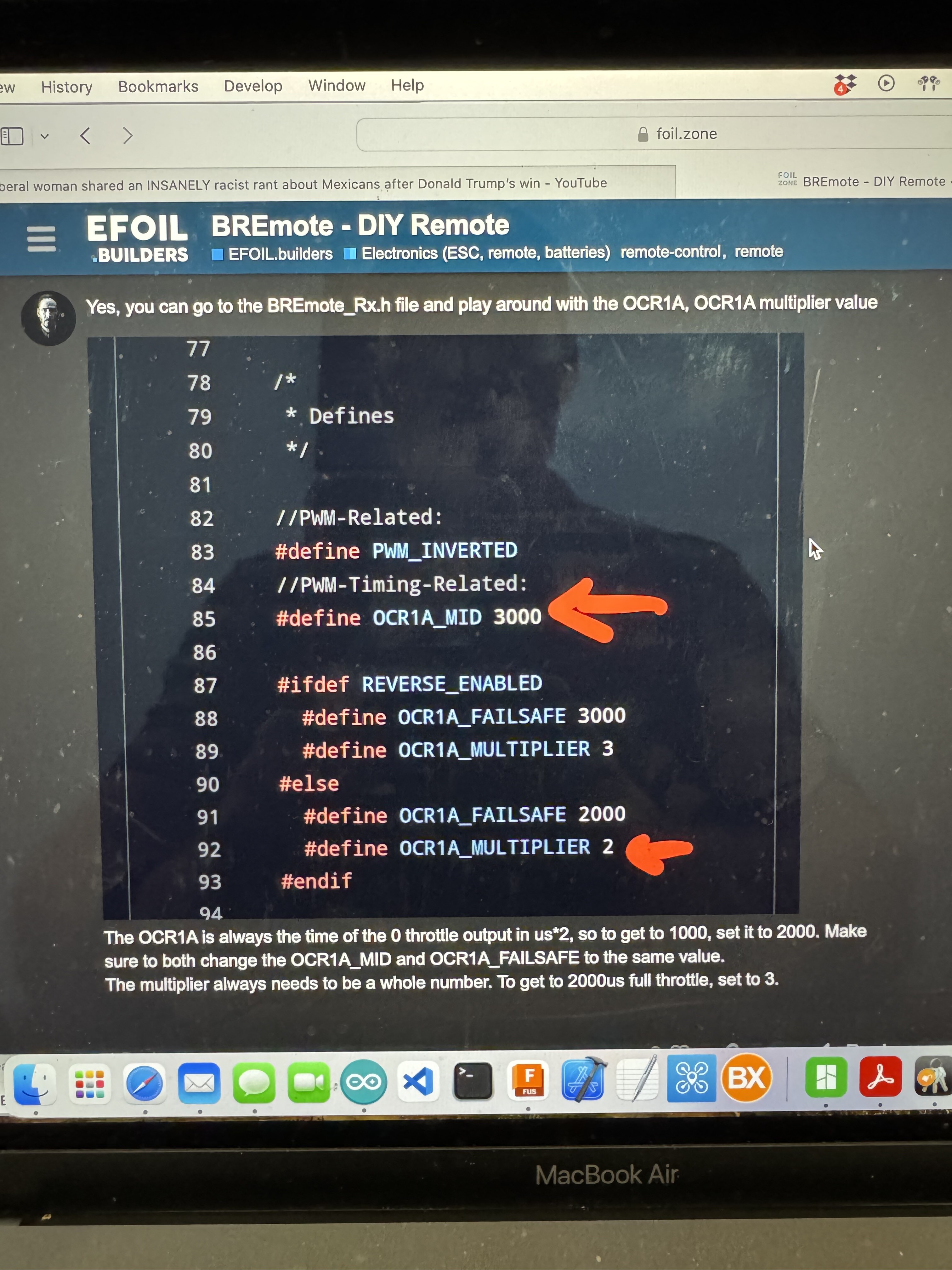
Please @ludwig_bre chime in if you don’t agree, but I found that if your use auto throttle calibration on the speed controller. Changing the values of the ocr1a_mid to 2000 in line 85 and the multiplier to 3 on line 92 gets the PWM signal closer to 1000-2000ms that these speed controllers like.
If you adjust the throttle min and max manually in BLHeli then you will just have to play with the numbers til it works like you want it too.
2 Likes
I calibrated on L0 and then again on L9 according to the instructions at oscarliang.com
- Start with your ESC unpowered.
- Set your radio’s throttle to the maximum position.
- Connect power to your ESC. You’ll hear initialization beeps.
- Once the beeps finish, immediately drop the throttle to zero.
- Listen for a confirmation tone indicating the calibration is successful.
- The motor should now respond immediately to throttle input, confirming the success of the process.
- After calibration, unplugging and re-plugging the ESC will save the new settings.
Should I be using another power level for calibration?
It didn’t make any difference, the 10k resistor side still starts later and spins slower. So should I change the #define STEER_LOWEND 950 values until it’s about even on both motors, or change the values in lines 85 & 92 according to @Jesserosco then adjust my BLHeli min/max settings until I get an even result? Many thanks to you both for helping with this!
You should only calibrate at L9. To get the motors set exactly synced there is another setting in the BREmote RX arduino file that I change. I’ll find it today and post it. I’ve found on all 3 of my dual motor boogies I set them up differently. On one the left motor starts a little earlier and it keeps it tracking straight. You’ll have to play with these settings for your boogie specifically.
1 Like
Thanks, good to know they’re all a bit different. Did you just change the one RX line you mentioned, or did you also change STEER_LOWEND, OCR1A_MID and OCR1A_MULTIPLIER?
I dont change the STEER_LOWEND, OCR1A_MID and OCR1A_MULTIPLIER for my Flycolor x-cross. I just manually set the throttles in BL_Heli. For my APD speed controllers I had to change the STEER_LOWEND, OCR1A_MID and OCR1A_MULTIPLIER and then I use line 130 in the communication tab of the BREmote_RX Arduino file to match the throttles. The line is
secondThrottleTime = (OCR1A_MID + (ppmTimeSecond<<OCR1A_MULTIPLIER))/2;
If you want the second motor to start sooner than you would add and if you want it to start later you would subtract. I start with +/- 10 and adjust as necessary to get it like I want it. So, it would look like this if you need to get the motor to start earlier on throttle pull.
secondThrottleTime = (OCR1A_MID + (ppmTimeSecond<<OCR1A_MULTIPLIER))/2+10;

1 Like
Is there anybody in the UK that could print and supply me the plastic parts for a BREmote i have all the electronics. I have tried the online 3D printing companies but not getting that far.
Michael
Hi Michael,
If you can’t find someone, contact Jasmin from openfoil.com and ask him for the parts - I am sure he can make you an offer
Cheers I will give that a try.
Michael
First I want to congratulate Ludwig for this incredible piece of hardware and software? This is truly impressive and the way he gives answers is also impressive.
I ordered the electronic Bremote, oprint with my 3D printer the plastic, built it and did all the stuff with the software. It works great on one motor but I want to build a tow with 2 motors. I have 2 flycolor 160 and 2 BEC? When I watch the schema, I do not understand anything because from the flycolor I have just a GND and a PWM (yellow cable). The 5v come from the Bec. So I miss a lot of wire!!!
Which BEC do you have? Something happened to my last reply, so I have to add this for it to post for some reason.
There is good wiring diagram for dual motor here Larsb tow build, Bremote LR and dual motor steering Credit also to @Jesserosco for Pioneering this differential steering.