I don’t understand why people use such small ESC in boogie. After all, boxes like Pelican 1400 allow you to install full-size ones like 75200. I used such ESCs for a long time without any breakdown due to overheating. The only thing I didn’t like was that when the connection was broken and then restored, they could enter programming mode. But with the advent of longer-range remote controls, this problem disappeared.

I agree for a tow boogie. I would at least go for the X-cross pro 200A.
I use smaller ESC’s cause there isn’t a lot of room left over for 2 big speed controllers with my 12s12p 21700 pack. Finding a spot left that’s big enough to cut a hole to place an external heatsink that has enough overlap to get a good waterproof seal on the bigger speed controllers will take a bit more thoughtful planning, but you are right that we should be able to run bigger more robust speed controllers. I am currently looking at different controllers and trying to figure out how to make it work. I will say that I haven’t had any heat issues with my external heatsinks and the speed controllers thermal epoxied directly too them. On my 3rd boogie I had a little heating issue because the heatsinks were at the back of the board so I designed it to spray water directly on the external heatsink and never had another issue. I was thinking of running a separate aluminum enclosure to house bigger controllers.
Just got out of the water and it runs like a dream. Full throttle, no issues stays cool. I’m happy with fly color again. I think setting the current limit messes something up. Who knows at this point.
Typically what seems to be the approach in RC electrics is to adjust the power system design using the propeller as the limiting force and iterate your design around that. In the end the goal is to balance the 3 components (batt+esc+motor/propeller) to ensure each is working close to its peak and not exceeding that or even running at conservatively less than peak. If you can size each component such that each is approximately equal in manufacturer power specification…Then use the propeller pitch and diameter and test, test then test again to make sure that no single item in the system is overheating or over current specification etc at various throttle levels. Obviously full throttle is the most important, but should be worked up to cautiously by adjusting the propeller pitch and diameter until you hit the sweet spot where everything is working harmoniously and full throttle does not exceed the capacity any of the upstream components.
I typically just copy other peoples or manufacturers design as the tuning can be very tedious, frustrating and expensive if you break things frequently like me. ![]()
Your observation of turning off current protection reminded me of this video.
They recommend leaving it turned off as it will affect the ESCs ability to accelerate the motor.

1 Like
What’s your thoughts on the APD stuff? I got a good deal on a couple 200F3 V2
With the lift or FR motor it runs flawlessly even with current protection enabled.
Some guys have had issues with the 65161, but I’ve never tried it on them.
I haven’t run it on the out runners either.
It’s a well designed esc with good support though.
1 Like
In the 10-15 esc’s i’ve had die most of them was due to loss of control at mid to low load. They had good mosfets.
Esc reliability is an overall design issue, hardware and software is equally important, as the recent VESC issues show (incorrect parameters in the vesc sw that was corrected just 1-2years ago, or the case of the poor current regulation of the flipsky 75200)
Now it seems more flycolors are used and more start burning. Question is how good it actually is.
1 Like
That’s a lot of ESC’s die! Have they mostly been VESC’s?
One of the more interesting recomendations I have seen with the FlyColor X-cross was to turn off current protection and leave temp protection on. For an assist this should be fine. For a tow-boogie it might be an issue though!
I haven’t had anymore issues since I turned current protection off and temp protection at 100c on my tow boogie.
1 Like
Yes, many escs but this is my entire ebiking efoiling and esc prototyping career included. I had the pleasure of being one of the testers of a new FOC controller a while ago, and killed a few there. On ebikes also a few. Two adapttos, two votols, four-five kellys, two KT’s, one sabvoton clone.
On efoils, not so much so far, propeller drives are easy on the system. One esc melted due to too good cooling of the temp sensor and a large delta to the hottest spot and one popped some mosfets.
It’s a lot of esc dolares up in smoke but i learned a lot.
Chat GPT feedback about the code below.
Anyhow, question is if the code will measure it right when starting the system using uncharged battery:
The code keeps adding voltage steps to the initial limit and checks if the measured voltage exceeds these steps. If it does, it implies another cell is present. This process continues until the measured voltage does not exceed the calculated limit, indicating the actual cell count.
In essence, the exact number of cells (S) is determined by the number of times the voltage limit is incremented before the measured voltage is below the limit for the next cell count.
To Understand the Actual Number of Cells:
- The code needs to be run in the actual hardware environment where the ADC can measure the voltage.
- By observing how many times the loop (
measure_lipo_cell_loop) runs, we can determine the number of cells. Each iteration where the voltage is above the limit represents an additional cell in the LiPo battery.
For example, if the loop runs 3 times before exiting, it means the battery has 3 cells (3S).
It still won’t be able to tell different batteries apart though.
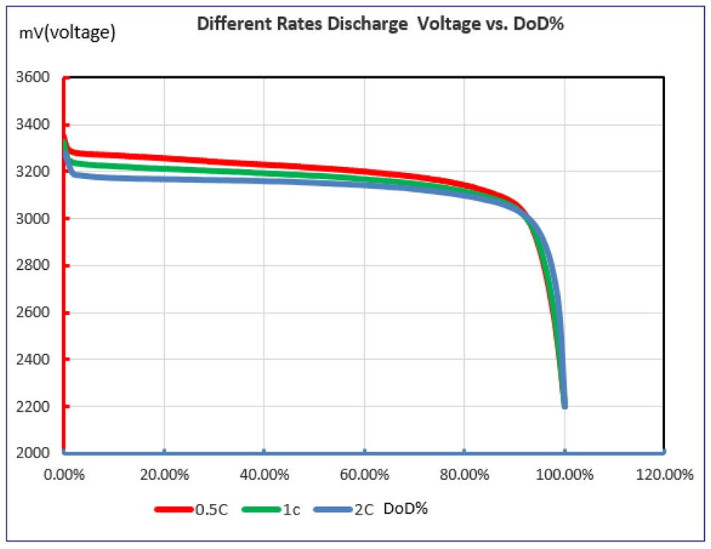
10s full lipo voltage is 42V
12s 40% lipo voltage is 42V
15s 0% lifepo4 voltage is 42V
And all possible other variations😄
but it will be able to detect lithium cells if tiu define a min valve of 3v, won’t it?
You might set 3V min also for lifepo4, that’s where the voltage starts diving for some cells. It seems to me this BLHeli function is not well thought out.
yeah, I’m not sure why don’t they just let you set up min value for the whole pack.
but it sounds the algorithm will work for typical lithium ion packs.
I thought I could at least count on the battery indicator in the remote but probably it’s based on the same calc. It just shows bars
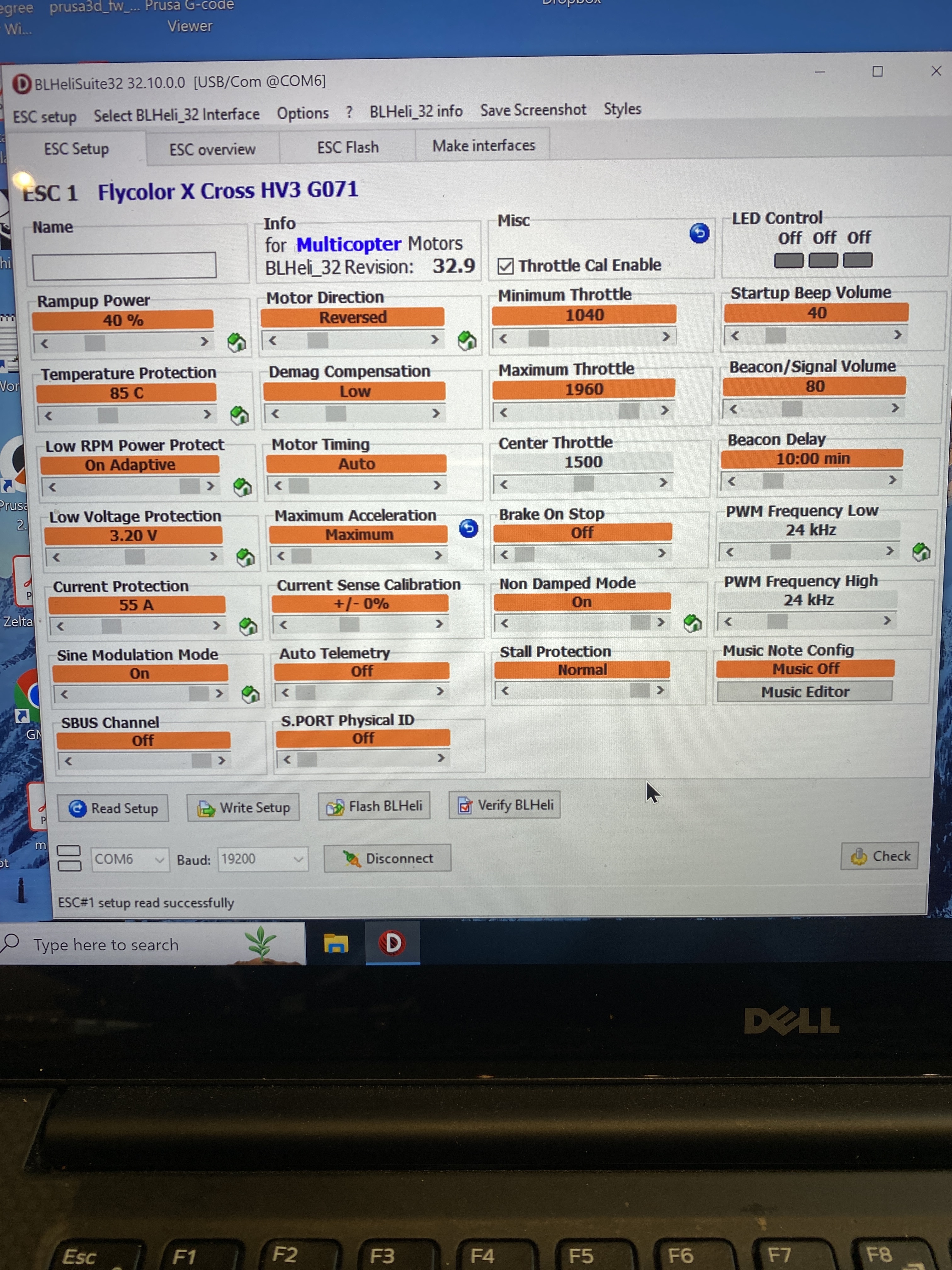
First time setting up XCross 160 and have some funny stuff happening, hopefully someone can help.
10S, Flipsky VX3, Saite 6384and the configuration is shown below.
After the first pull of the throttle the motor revs up fine but then settles back to approx half throttle even with the trigger released and VX3 turned off. Motor will stop if the VX3 receiver is unplugged. Changed receivers and identical behavior. Consistently doing this now, is the esc fried?
Thanks
Never tried the blheli but there is a ticked box for throttle calibrate.
Probably the calibration was initially done, storing improper values, and now the throttle low should be higher, that is the cutoff value and if your remote signal never reaches below it there will always be power.
Looks like you have changed a few things from their default values. I do not see anything wrong with what you have used, but maybe go back to the default settings and try again.
I think the problem may be your settings in your remote. Is there a way to alter the endpoints in your transmitter settings to make them match what the ESC is set to?