Hi eFoiler,
like the most here I’m happy about this website
A lot of answers and ideas but also questions…
In 2016 I started to build a jet powerd iSUP - first with a MHZ Jet 52 Booster and the second one with a self made jet - thanks to 3D printing.
After a lot of experience and learning I come to this conclusions:
Outrunner will not really work because of cooling - direct running also not because of salt water
Innrunner with very low KV have a bad efficiency - 500KV is minimum
Therefor a planetary gear is required - with 10S or 12S and 500KV it’s 18.500 - 22.200rpm - so 5:1 is ok
The only gear that I found for this high rpm is the Reisenauer Motor-Chief - Neugart and similar ends with 8.000rpm
Jet propulsion is also not very efficient - especially with battery pack and if the drive is under water
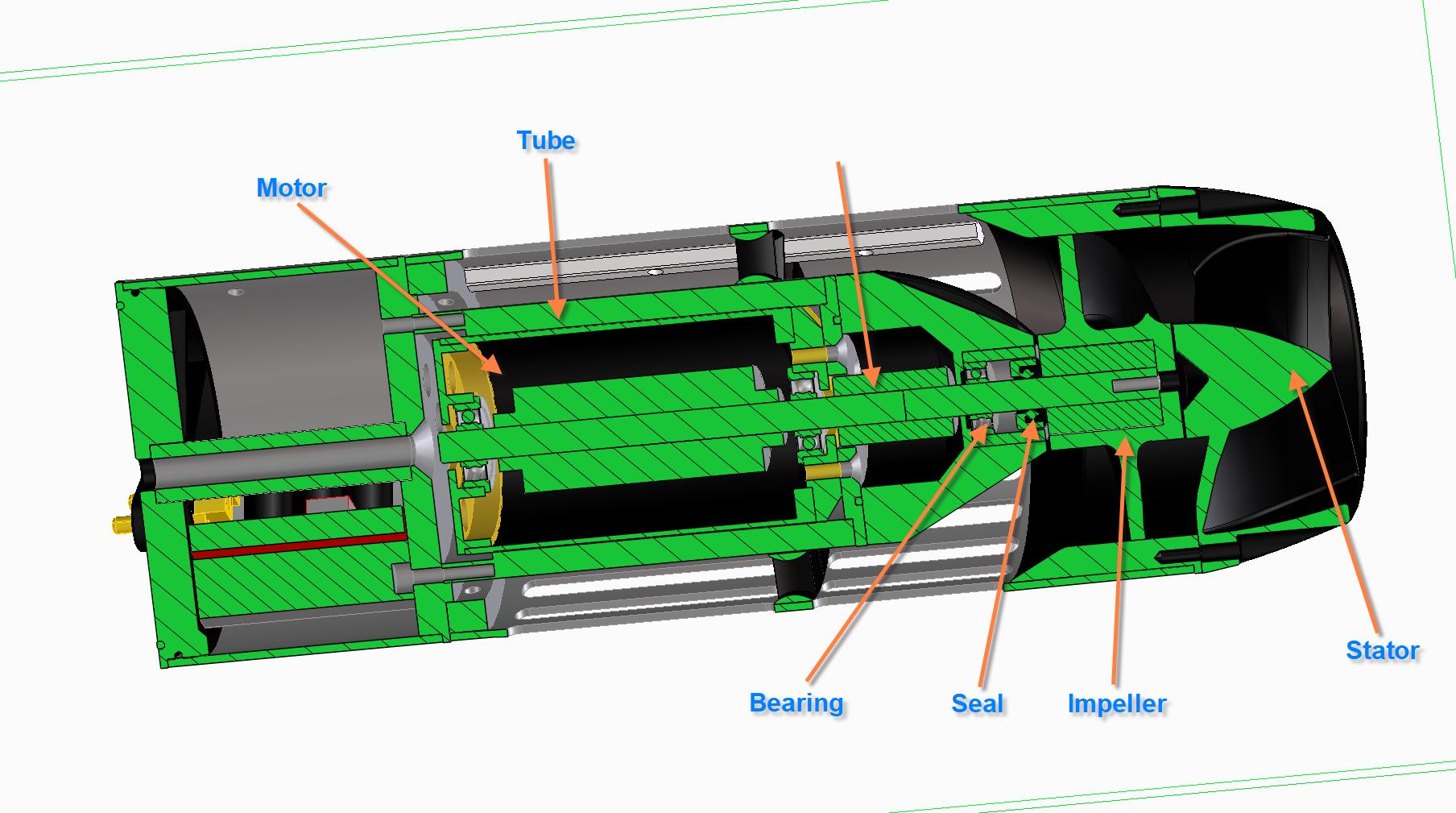
The gap between motor and tube should be max. 0,1mm - otherwise the thermal compounds will not work
I’m looking for your comments - what are your opinion to this points.
If the are people from and around Munich it would be great to meet and share ideas.
Good summary Mike, thanks for sharing your experience. You are highlighting some of the mayor challenges, I totally agree. And this is how we ended up with the common inrunner+gear design here. It works… however I think it is super important that we all continue to look into solving some of these challenges in different and maybe better ways. Let’s don’t settle on what we know works today. I really love and encourage all the efforts here like epoxy-potting outrunners for in-water use, trying multi motor setups, belt drive experiments, design/find special low kv inrunners for direct drive (yes they will be bigger to get the torque we need), improve jet drive efficiency under water (maybe by pumping air down?)… Let’s don’t stop trying things … servus heimat
Very sleek and professional looking Mike!
Jet pumps are not as efficient as larger props but they serve a purpose.
I agree, the smaller you can make the gap between the motor and aluminum tube the better for dissipating heat. The 56mm inrunners are a little loose. There is a 57mm motor which should fit very well in the aluminum tube.
Your comment on lower KV motors being inefficient. I kinda buck the trend in my thinking. I’m, not a racer kind of guy looking to cut every ounce of weight possible and squeeze the absolute most power/run time on a battery pack. Though, I am trying to build something as efficent as possible. My focus is on a simple design meaning fewer parts which translated into lower build cost, and fewer breakdowns is my line of thinking. So I like the lower KV inrunners and direct-drive personally.
If you wanna know all about gear drive system be sure to post your question on Pacific Meisters thread just for that build as there are tons of builders focusing just on that build talkign about the best motors, reduction gears, power 10Svs 12S etc… http://efoil.builders/t/pacificmeister-build-info-and-cad-sources/21/140
Few questions for ya…
Your running a 56-57mm impeller?
What diameter did you end up going with for your nozzle outlet?
And did you put water vanes in the nozzle to reduce water rotation and help increase thrust?
Do you know what Thrust are you getting with that motor (SSS 500kv) ?
Hi pacificmeister,
you are right - only with trying something new you will come further - on the other hand it’s not necessary to do the same fault like others
Currently I try to build a magnet gear - maybe the outer magnet ring can be the shaft of the propeller - that would be the perfect solution. Next step can be a magnet gear motor… I think we will need a BLCD motor company to do this - maybe together with some enthusiasts like you
If it’s possible to creat a uniform construction we can make something like a bulk order - nearly all parts are from China and prices depending on amount.
What means: servus heimat?
Hi VeFoil,
the MHZ Jet was 52mm with a Scorpion outrunner - unfortunately only with 6S and very much current
Another point is to get the casing absolutly seal and the giude water inside for cooling - that is not useful.
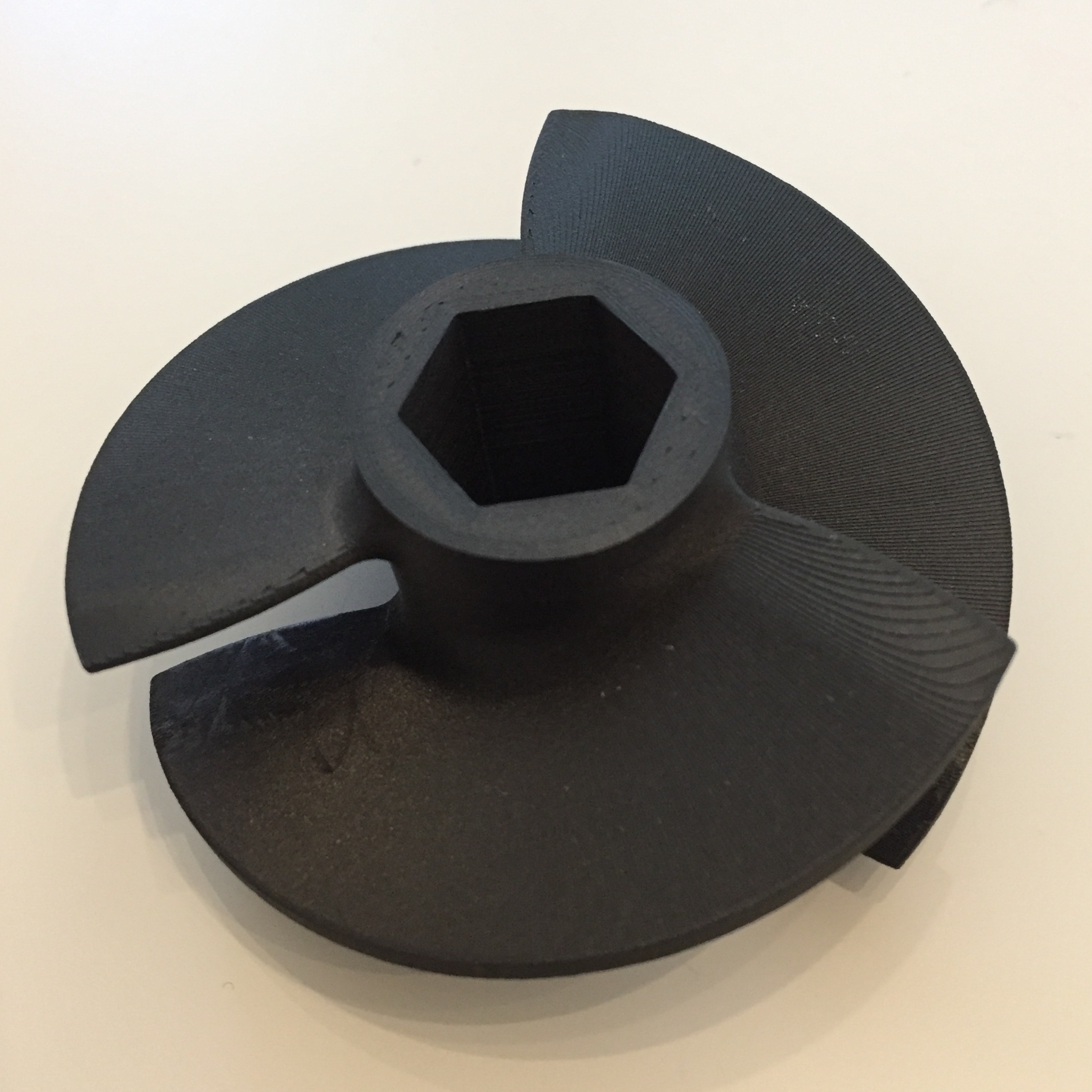
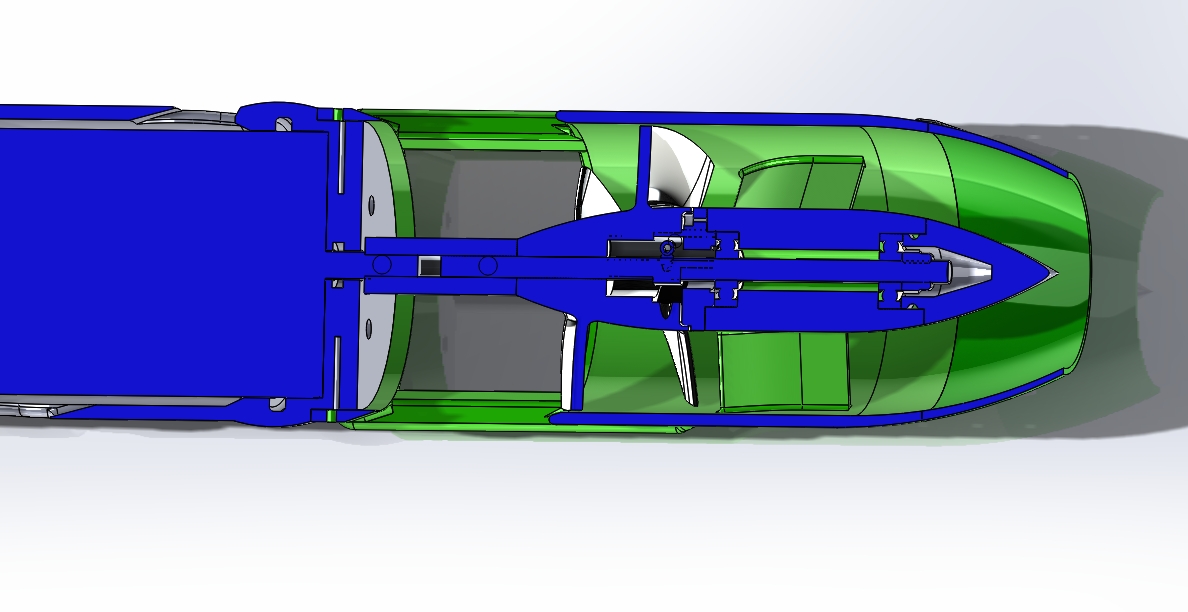
The orange torpedo on the first picture is 10S with a 79mm jet and a TPPower 394kv motor - passiv cooling for motor and ESC. The longer part is the accu (90pcs Sony 18650) and the short part the drive. The outlet has the same area as the impeller and water vanes to reduce water rotation. Thrust was 25kg measured with a suitcase level - sorry, not very professional.
This picture shows the MHZ version…
Wow really cool designs!
You using TP56XX or TP58XX motor?
I would think 394kv and 10S with 79mm impeller may be a little much for that motor. I know MHZ shows 80mm turning 14,000 RPM, but they also have a $1000 motor, and $1000 Controller to power it. Have you tracked RPM with the 79mm? I have a feeling you maybe only turning 5000-7000 RPM in reality. Thos larger impellers require a ton of torque, dropping down in diameter you may get better results with the top end, but a little slower out of the hole.
I’m not sure I understand your 79mm nozzle reply. I see your nozzle is black and narrows at the end. I’m wondering the diameter of that smaller nozzle end after the impeller?
Hi VeFoil,
the motor is a TP5670/394kv - the impeller has 58mm pitch and minimal compression at the outlet - theoretically 50 liter/second.
I didn’t measure the turning but the current from battery to ESC - at full power it was 80amp.
My thoughts was to find a middle way - a very small diameter with very high presure makes no sense like a very big ones with low preasure - thererfor I’ve tried different impellers/pitches.
Thanks a lot @SUP-MIKE for the valuable info! So just to summarize: 79mm impeller, 394kv, tp5670, 10s, 80a, 25kg is static thrust, 15km/h sup. Correct?
Double Barrel… your a madman! Love it!
Do you know the current during operation of these? what ESC did you use? and did you have water cooling for ESC’s?
ESCs are a challenge. They must be water-cooled in some way, shape or form… and its worth spending $300 on a 300-500A ESC as everything will be built for high current, and when we run our 80A- 135A through ESC it runs very cool and efficient.
Side note on motors in case this info helps?
A motor only has so much torque because of their size and design. the TP 5670 models almost all carry the same overall torque, just the RPMS are different. If you run it on 6S, 10S, or 12S it will still only turn a propeller or in this case an impeller the same speed as the torque will be maxed out at 4500- 6500 RRM roughly is my guess as I have tested with 80mm also.
The higher the KV, the more sensitive the throttle response will be for controlling RPM and feathering the throttle when riding. Technically from my understanding and experience, you could use a 250kv motor of that same TP motor and end up with the same RPM/Thrust, and use lower current, plus your throttle response will be nicer to feather.
Using a lower KV motor gives you more torque per Amp. Example: TP5670 554KV will draw 130A when torque is maxed, vs the 394kv will have max draw of 93A. Both will give you the same end torque and RPM, and ESC will run much cooler at 93A vs 130A. Hope this makes is making sense to someone
That particular TP motor is nearly identical to SSS 500kv/360kv design and torque I think, and TP stats show it should have 1.8Nm in mechanical torque after the loss of efficiency that DC brushless motors have. I have SSS 500 at 1.9Nm, 360kv at 2.1Nm. Im about to be testing a new motor that has 56mm diameter and is a little longer and has 3.1Nm which is a lot more torque, Ill share results here once I test it in a few weeks.
Nice summery,
I gona pic up on your points in your order:
Why do you think, KV will affect the efficiency?
The KV is affected by the turns and wiring ( Y or D), so I don’t see the point.
well, (imho) neugart and parker are industry standard gearings, they have a rated lifetime of some 10000h, so I guess there are some specs like the maximum torque which you must not exceed, but e.g. the max rpm affects the lifetime, but since we won’t need several 10000h neugart and parker might be fine as well.
Well, you can do a “jacket” as a spacer to have some pressure against the hull/fuselage.
The max. current while running was 80Amp but the reason for burn down both ESC was a short circuit between phases of the two ESCs - that can be the only explanation…at the moment…
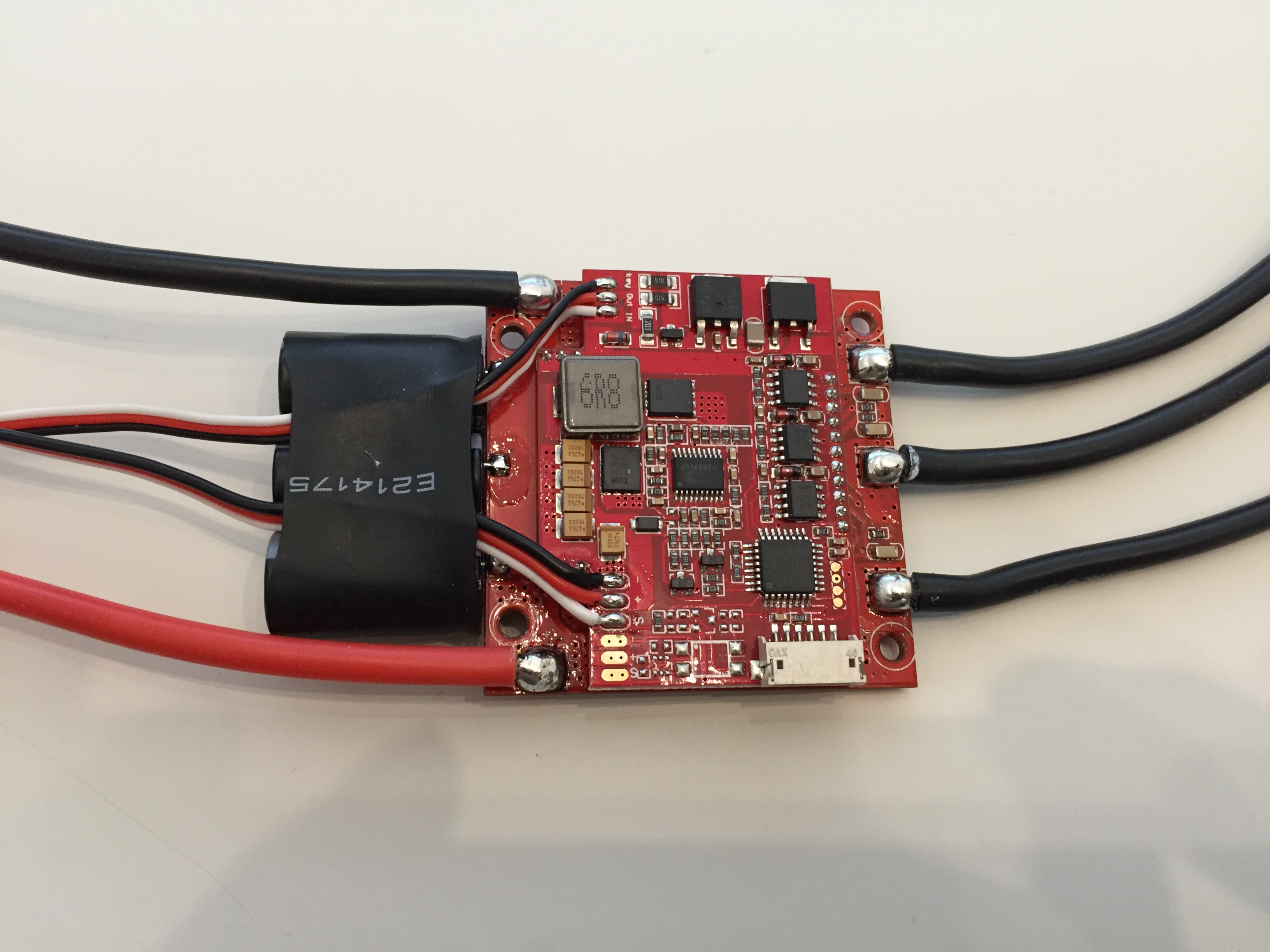
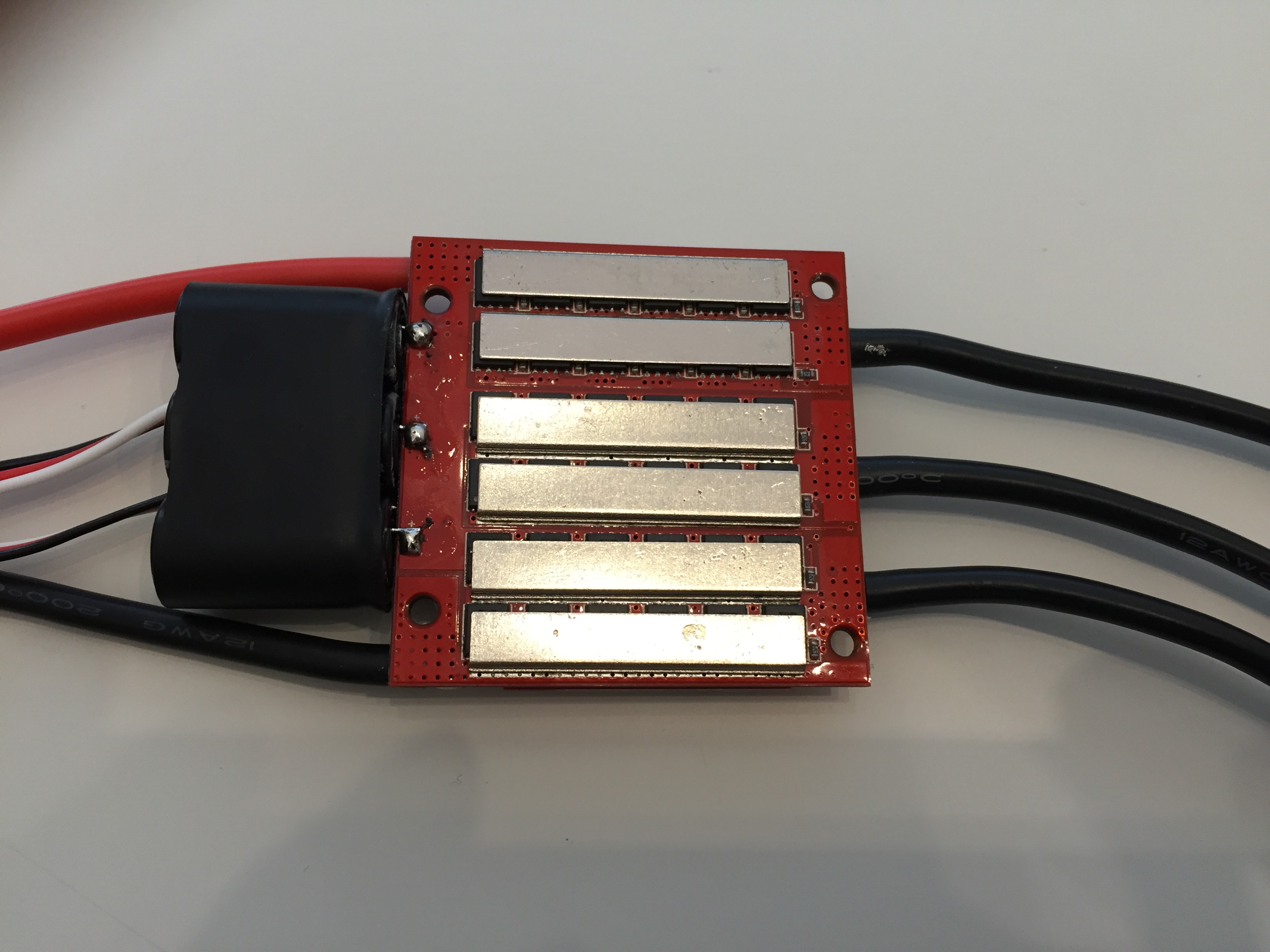
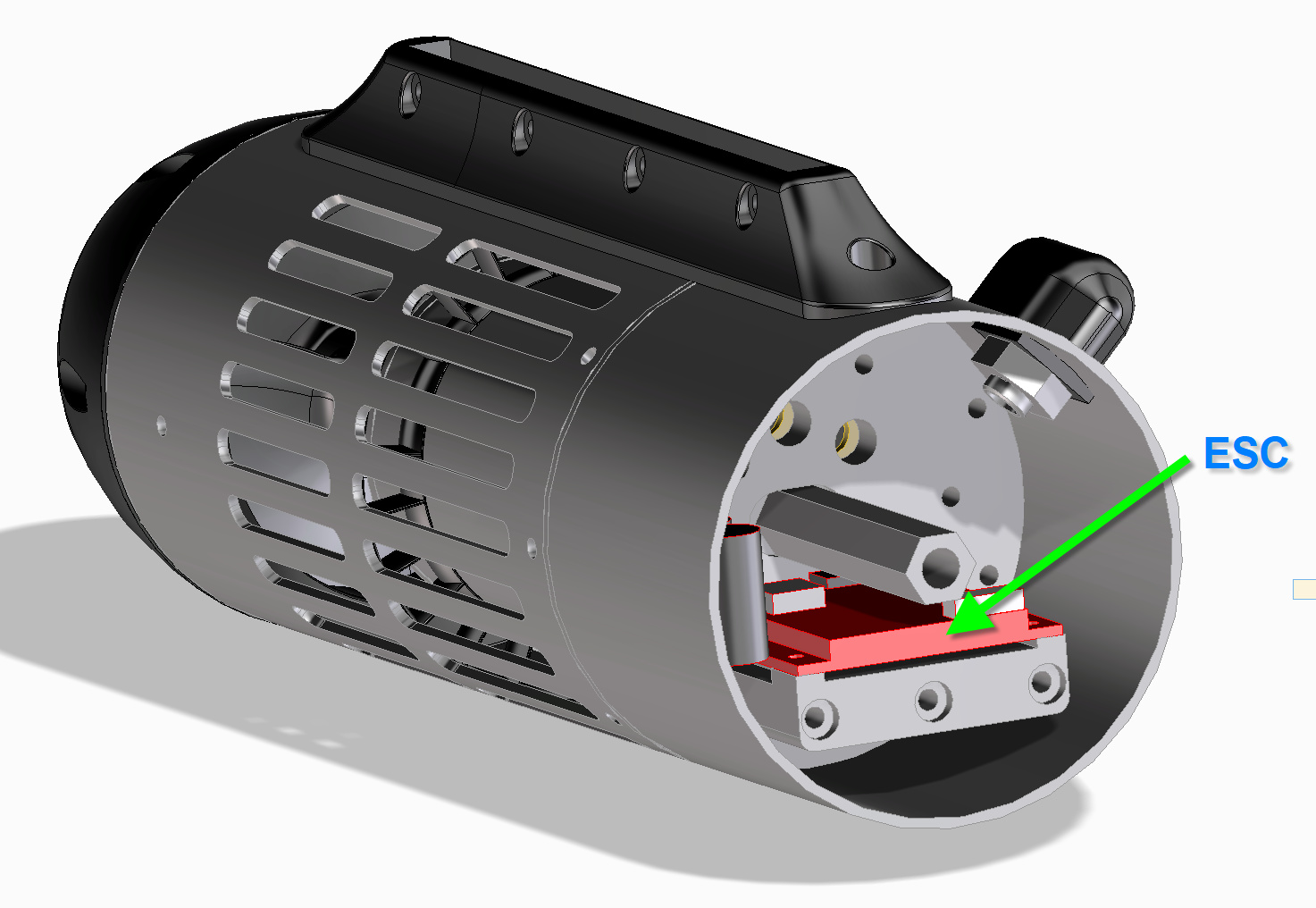
I put it inside the 100mm tube on a aluminum block with thermal pads to isolate the mosfet rails - because all housing parts are aluminium I get a goog heat transport:
Hi Chris,
I was talkng to some guys who are involved with BLCDs - very low kv needs thinner wire, special winding a.s.o. - maybe it’s only 3-5% more efficiency - but with battery it make sense to optimize.
You are right - industriy standard - especially from Germany - is recommendable. The Reisenauer Motor-Chief is very smal and the input gear is directty on the motor shaft - therefore you will get a very good concentricity - in my view much important.
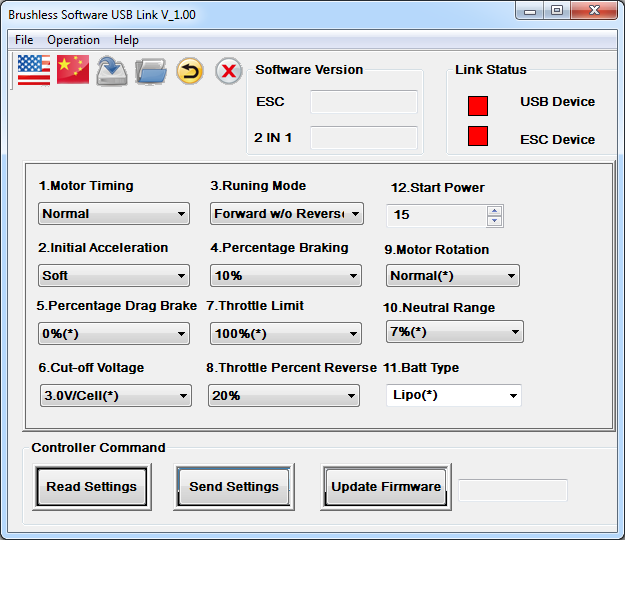
I love this design, especially the monting of ESC. I saw maytech is advertising it is based on VESC. But i cannot see any shunt, µC, interface like it used to be on VESC. Do you use the BLDC-Tool to program and test it by USB on PC? Are you able to limit the phase current?
Is the housing of the inrunner directly water cooled?
Hi Toto44,
I changed the two bearings in the motor to angular contact ball bearings - so this can take the axial load.
Next version will have a gear with angular contact ball bearings inside.
Nice build - you are using normal bearings instead of angular contact ball bearings? Do you think water inlet for jet will be big enough? Have you tested?


 … servus heimat
… servus heimat



 )
)