I personally use stainless steel bearings.
1 Like
I don’t get why the Foildrive has two ceramic, and one stainless on their G2. If one stainless doesn’t rust, why not use just use 3.
They waiting for another manufacturer to improve their overpriced under engineered product ![]()
1 Like
One of the bearings needs to bear with the load of all the trust created by the motor and push the craft with person forward. In my maytech full ceramic motor, that specific bearing failed and the stator and rotor stated rubbing. So at least for the load bearing one I prefer stainless.
1 Like
But that doesn’t answer why they don’t just use all stainless. They work out cheaper and better than the ceramic anyway so may as well use 3 instead of a combination.
Exactly.
Ceramic made sense before the disassembly of the rotor from the stator was standard practice as the bearing was hidden and hard to rinse.
If stainless are stronger than ceramic, and doesn’t rust too with lanolin and rinsing, then it makes sense to use stainless for all. Will be cheaper and more reliable
The only reason I can think of is that it’s easier to get a failed ceramic bearing out by chipping diy styles than it would be a stainless steel one.
Do you think that a 8$ bearing in 4000$ system is really more expensive? If the bearing does not need to bear the motor load, the ceramic is obviously better, no rust, no maintenance.
Yes when you consider the effort of customer services and shipping worldwide etc. Many time customers don’t understand that while the part itself is not that expensive, when replacement mean added support its a much bigger thing.
The stainless are marine and don’t rust. There are actually outrunners you can buy that don’t even need lanolin and all the added effort that FD users have to make. They just haven’t got there in the development yet.
@Jesserosco I got these through the post today.
Looks like the might do a similar job to what you have. 10cm aerial with ipex connector and a waterproof gland with an sma connector on the external side. This connects to the long (currently 3m) extension antenna.
Looking forward to trying it.

5 Likes
Great work @Jesserosco ! I love this build, been through it dozens of times and it’s always getting added on to.
Couple of Q’s on what’s been working and what you’ve moved away from.
- The propeller image above is it working out (STL?) and how far are the motor pods apart? I believe I read that at some point you went to wide.
- The originally I think you went with the FSESC VESC 6.7 then moved to the flycolor. Did the Flipsky fail, not work? Of course those are the ones I have

- The propeller image above is it working out (STL?) and how far are the motor pods apart? I believe I read that at some point you went to wide.
Yes. @V_S has a bunch of awesome props. Just do a search and you can find the link to the page with all his .stl files.
- The originally I think you went with the FSESC VESC 6.7 then moved to the flycolor. Did the Flipsky fail, not work? Of course those are the ones I have.
I used the flipsky 70A first and they worked great, but not enough power to waterstart my prone board. I could waterstart my 56L without any issues and if you start on your belly you could go on a prone board. I just like having the extra power.
1 Like
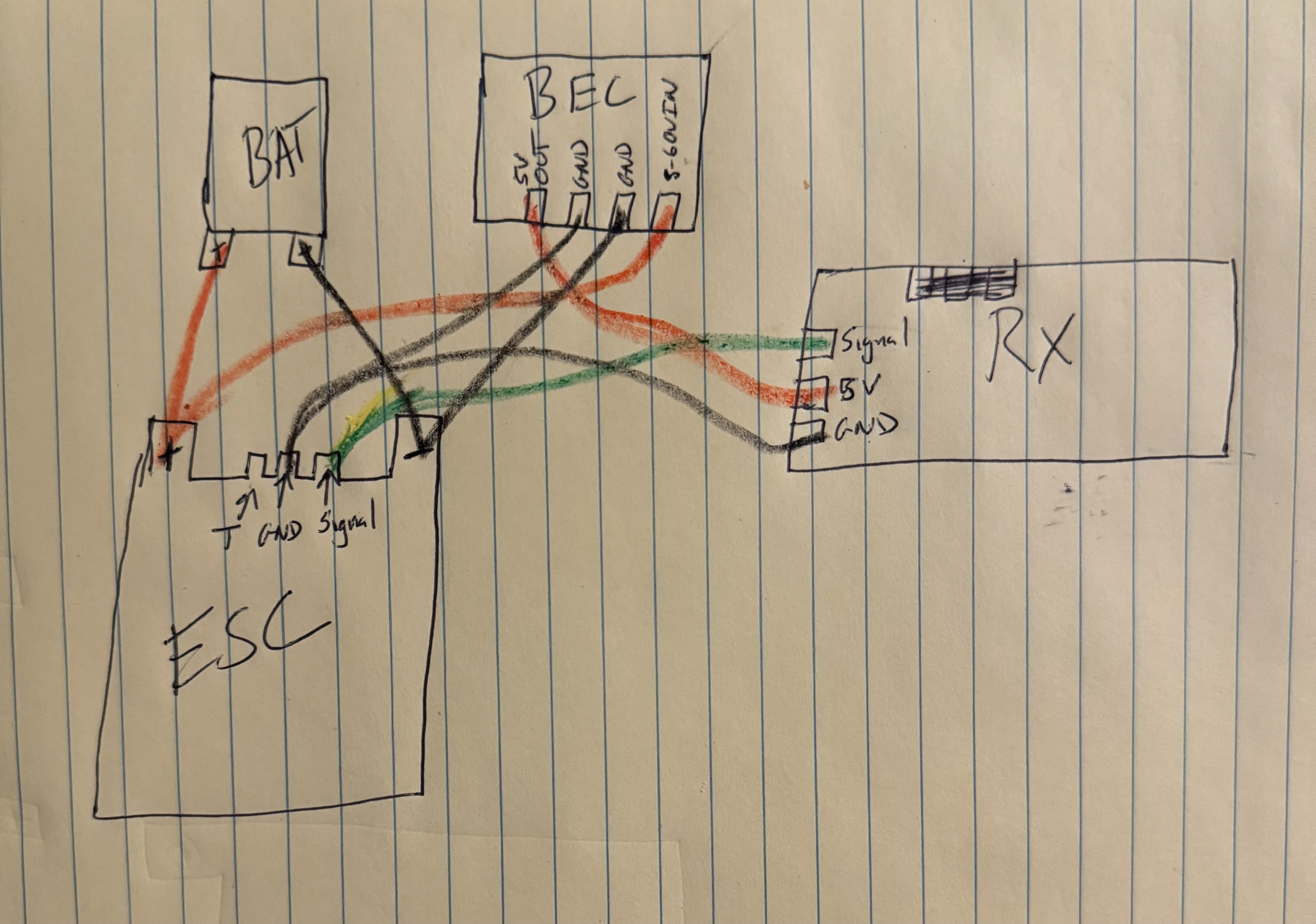
Crude drawing, but hopefully easily understood. I think the biggest problem people have had with the BEC and RX board is not getting good grounds. This is how I wire each one of mine up. Then you’ll need to follow @ludwig_bre direction for adding the 10k resistor and combining the signal and 5V for the second PWM.
Yes, I used my kids crayons. Haha
3 Likes
This feels like a really dumb question, asking this here because you have been so helpful so far. How do you mount the 6384 into the motor pod? My 6384 has mounting holes on the end with the shaft, but the back end is smooth.
I have similar 63100 from Flipsky. You will have to drill 4 holes and tap the threads
1 Like
Those mounts are designed around the M4 threads placements on the BDUAV generic 6384 from our friend Ali ![]() , you may need to adapt for another design…
, you may need to adapt for another design…
I didn’t read the post very carefully, and you must not be very knowledgeable about motors. Flipsky motors have holes for attaching to the motor pod, but no holes for attaching a propeller.
To install the propeller, drill holes or replace the shaft with threads.
Thanks for all the replies, @rttn, you are right that I got that a little mixed up. Seems pretty straight forward to drill and tap some holes when the motors are apart to replace the bearings.
Thanks!
Hi I’ve been reading and following this thread and am researching to build my own boogie tow. But I can’t seem to find how do you return tow board to yourself once you’ve caught wave and get back to catch another. Is there a rudder on board to steer?
Have you installed a return to home system via GPS.
That’s what I will be doing. I’m not at pumping skill level yet to get back out.
1 Like
I use differential steering using the long range version of the BREmote by @ludwig_bre. Because its dual motor the BREmote allows you to steer by slowing either of the motors. So, we manually drive it with the BREmote back to us. I personally drive it close to me while im surfing the wave to keep it close. The range is really good, but if you lose line of sight in bigger waves you can’t control it. I’ve added an external antenna on a flagpole, but haven’t had a chance to test it, the wind has been cranking non stop and I’ve just been wing foiling. No other remote on the market right now allows for this.
I can’t speak highly enough about the BREmote. @ludwig_bre is currently developing a new version that looks like it’s gonna be awesome. There are a few threads on the BREmote and you can order from open foil.
2 Likes
Thanks for help ive enjoyed reading your thread and progress, i have ordered Bremote and its on it way, i was thinking of just building a single motor version with 65161 120kv motor, And an internal servo to steer motor on mast somehow?