Did a filled epoxy coat on the PA6 controller box.
Printed the battery cover
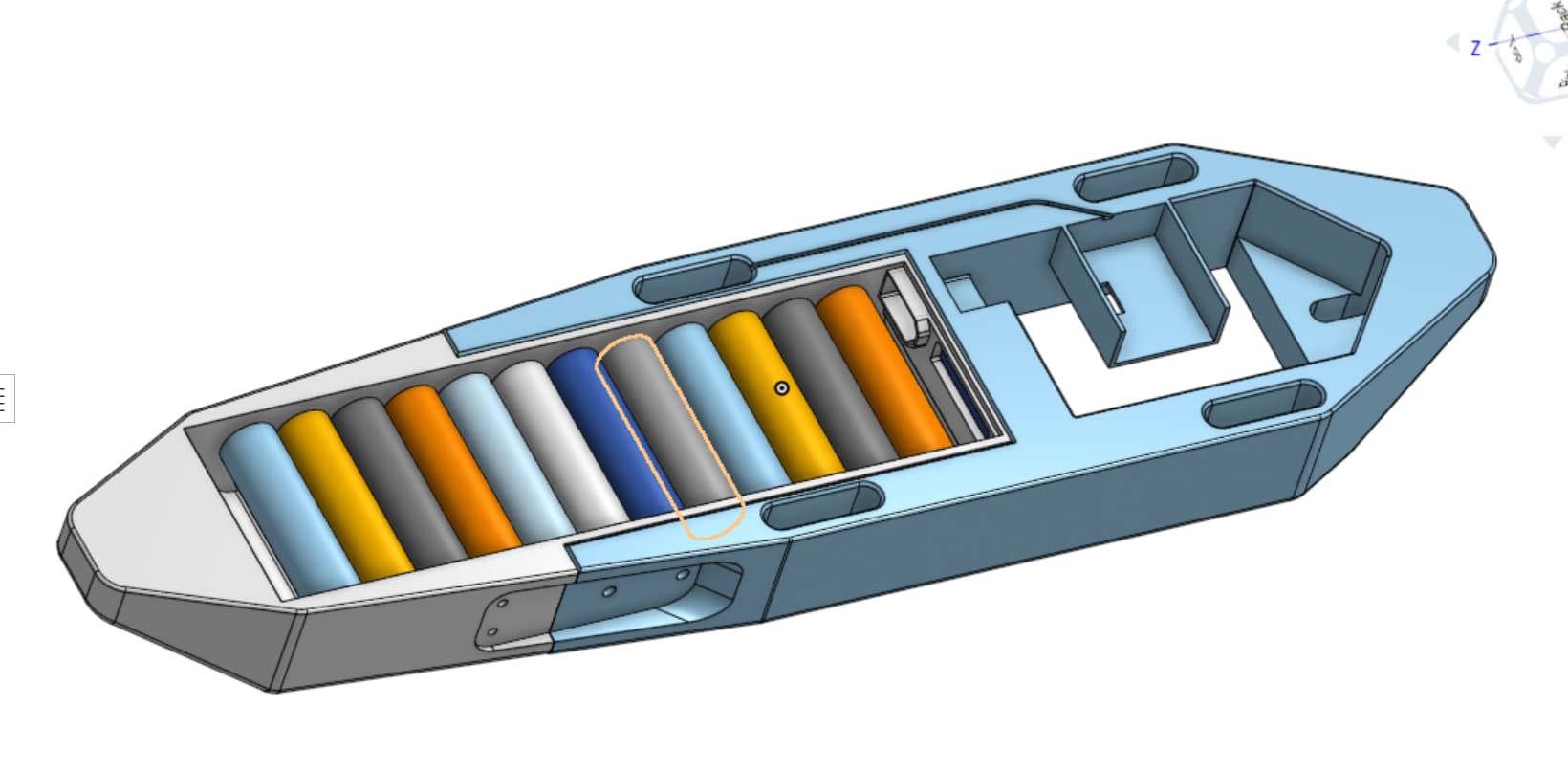
Reprinting the battery box with more clearance, both in lenght and width/height.
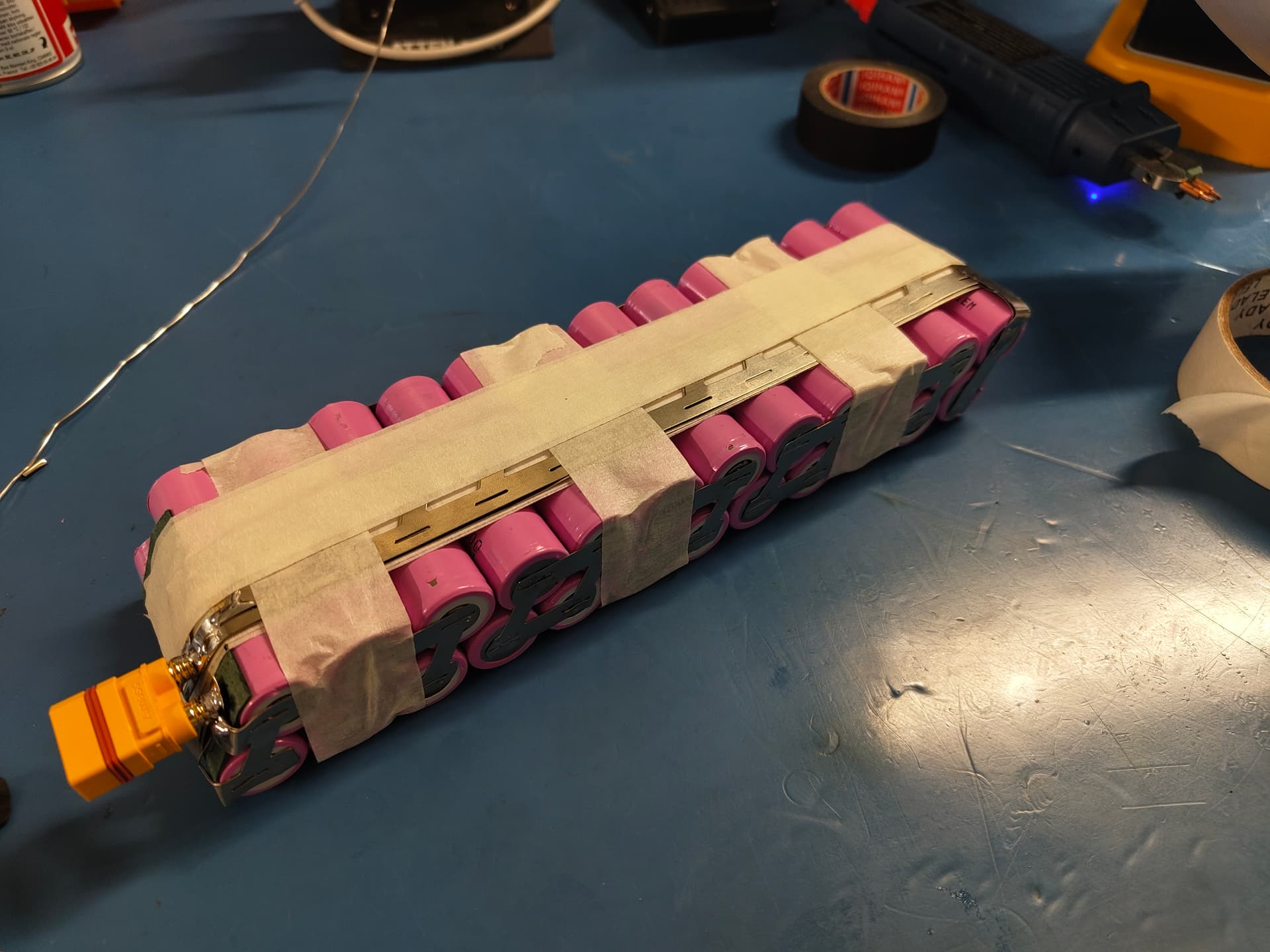
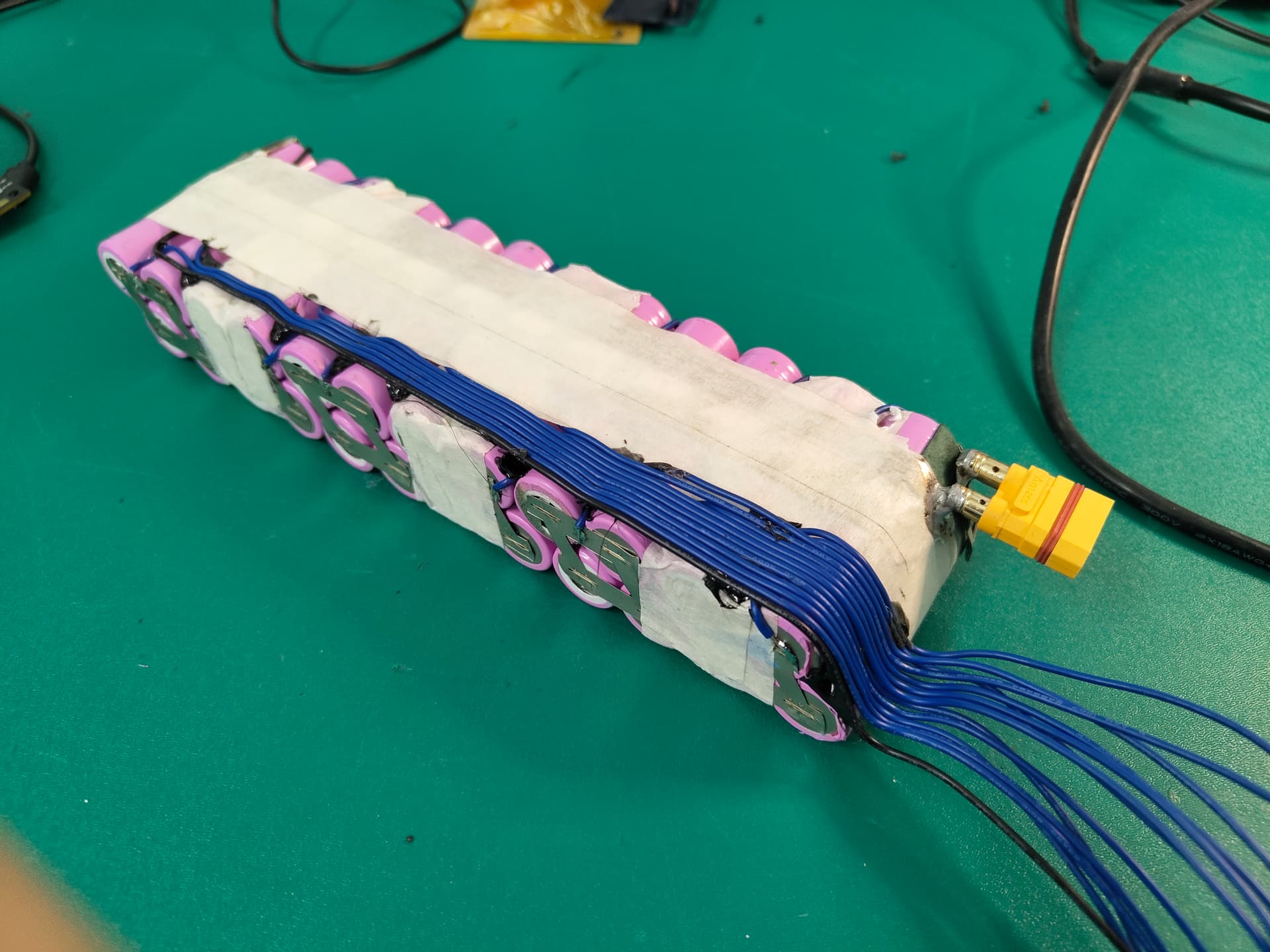
Finished wiring the battery power, left is to wire the balance.
Stopped to go much further until I receive the MR60 and the pogo.
@FoiledBySpoil sorry to hear. Zero volt cell could be few things in my experiance.
reverse weled cell in a P group (happened twice in production over 500+ kwh batteries, group goes to zero volt)
perforated cell (minus side weld need less energy than positive)
Printed the parts for the maytech POD, with three blade hub.
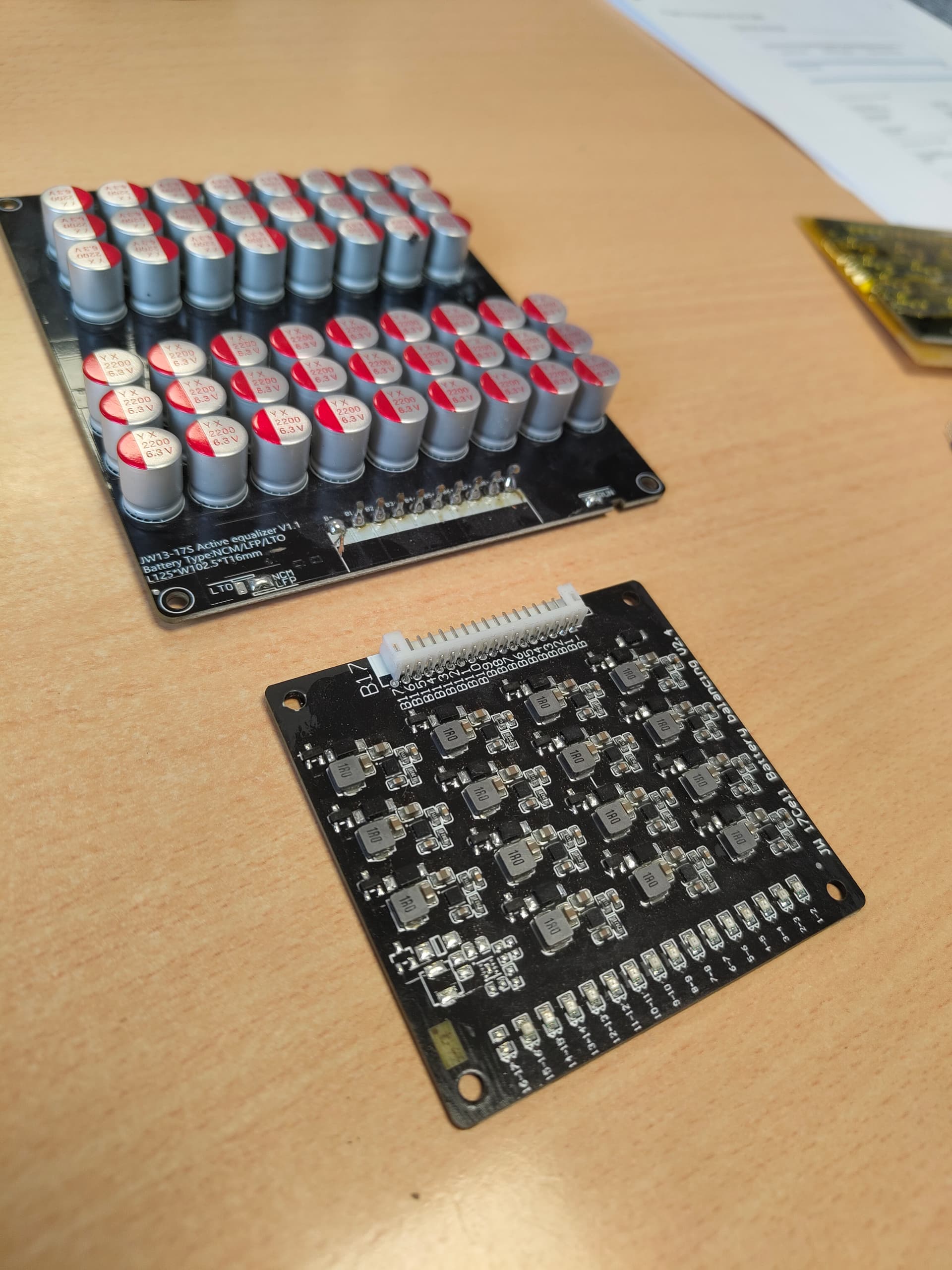
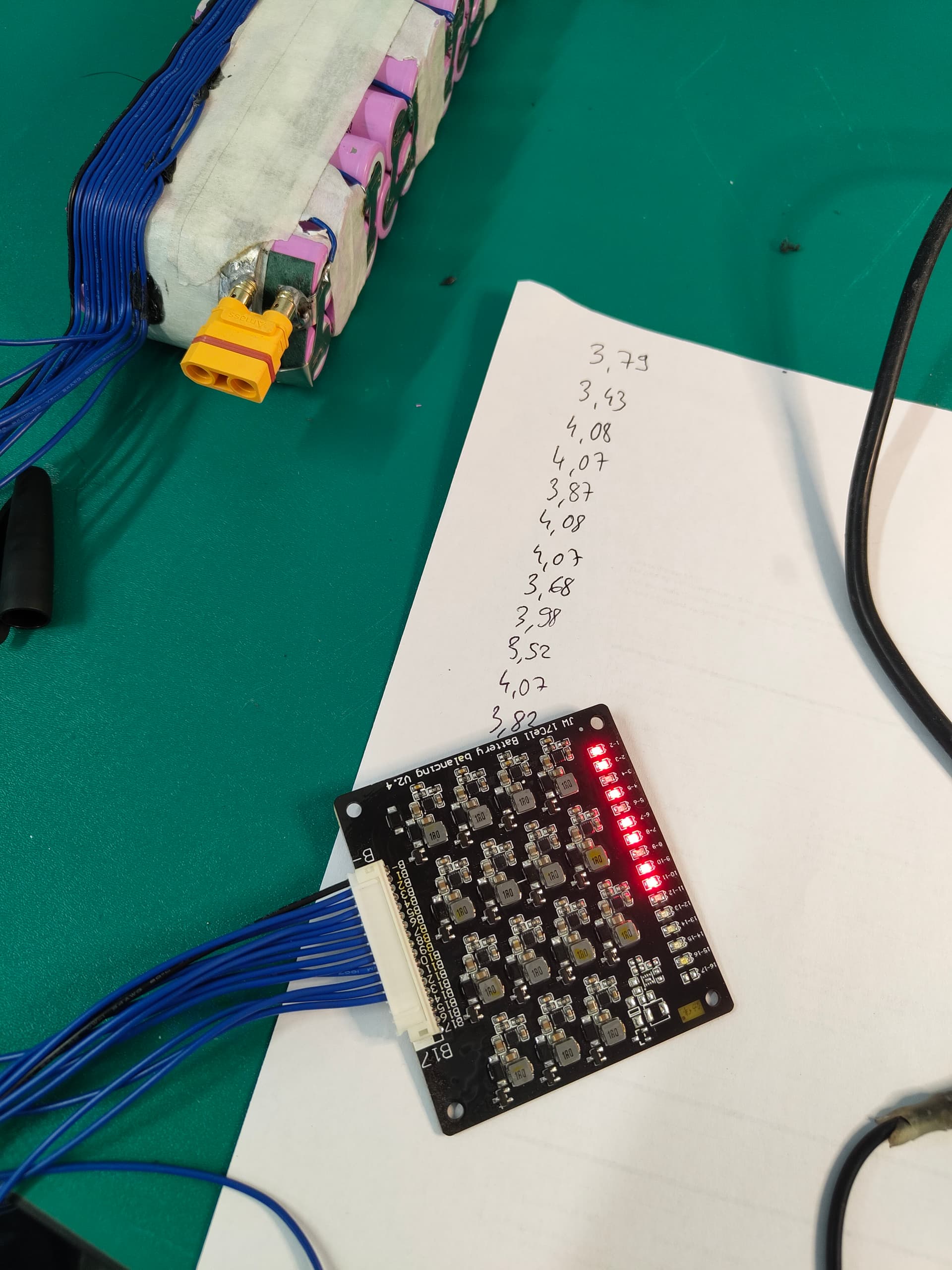
Found some active balancers that we tested before, the inductive (black) ones are not great, as they have 0.1v min activation voltage between both cells, so they create some sort of staircase voltage levels in a unbalanced pack.
The capacitive ones work very well in my experiance and super fast to balance out of whack packs, tested up to 10P
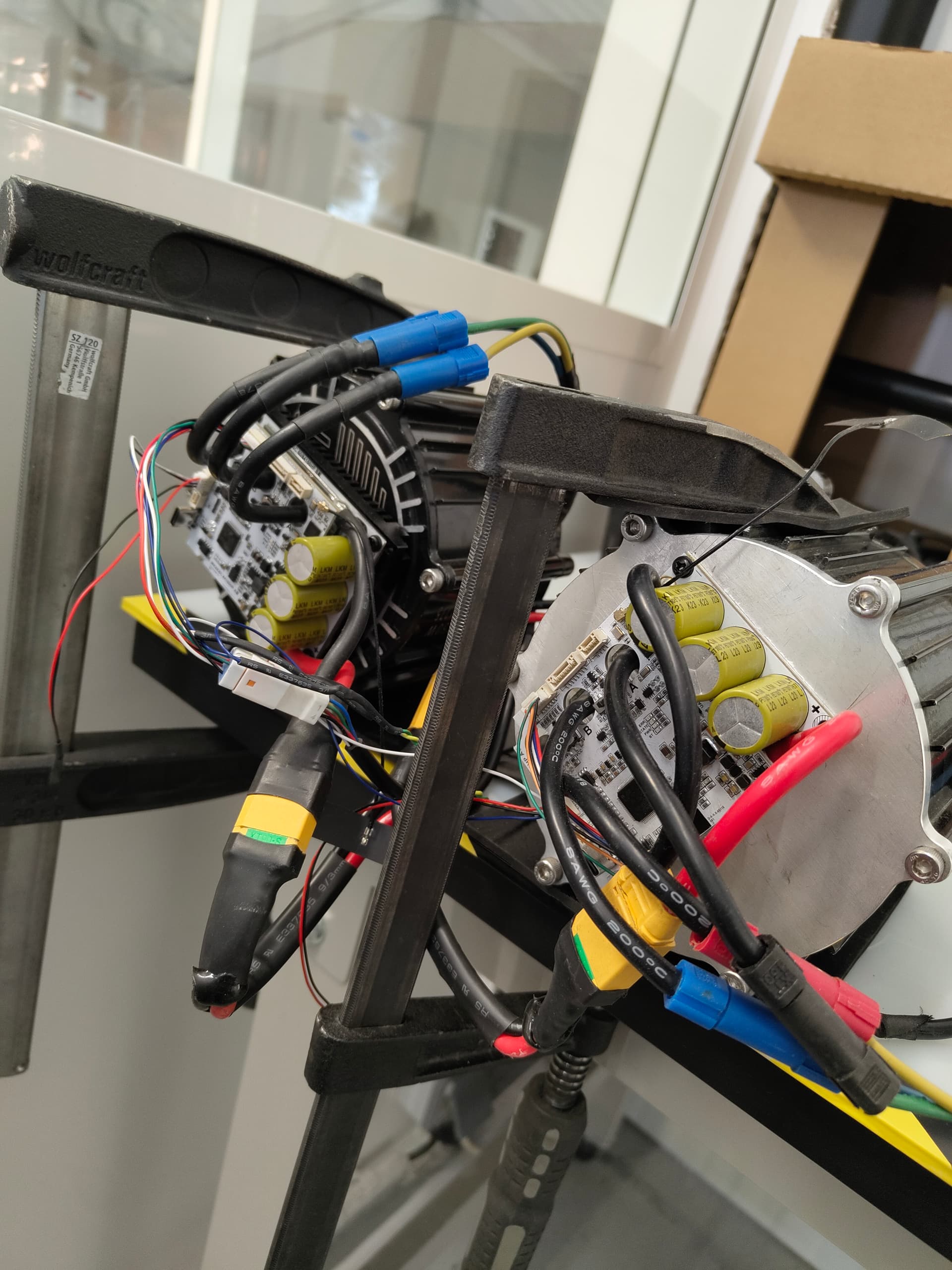
A Friend of mine has, for e-foil use, without external cooling, he was very happy with it.
We used them a lot for test bench tests, they are going into a motor we are designing, that has already 10’s of hours on the test bench. Can not share more, work stuff
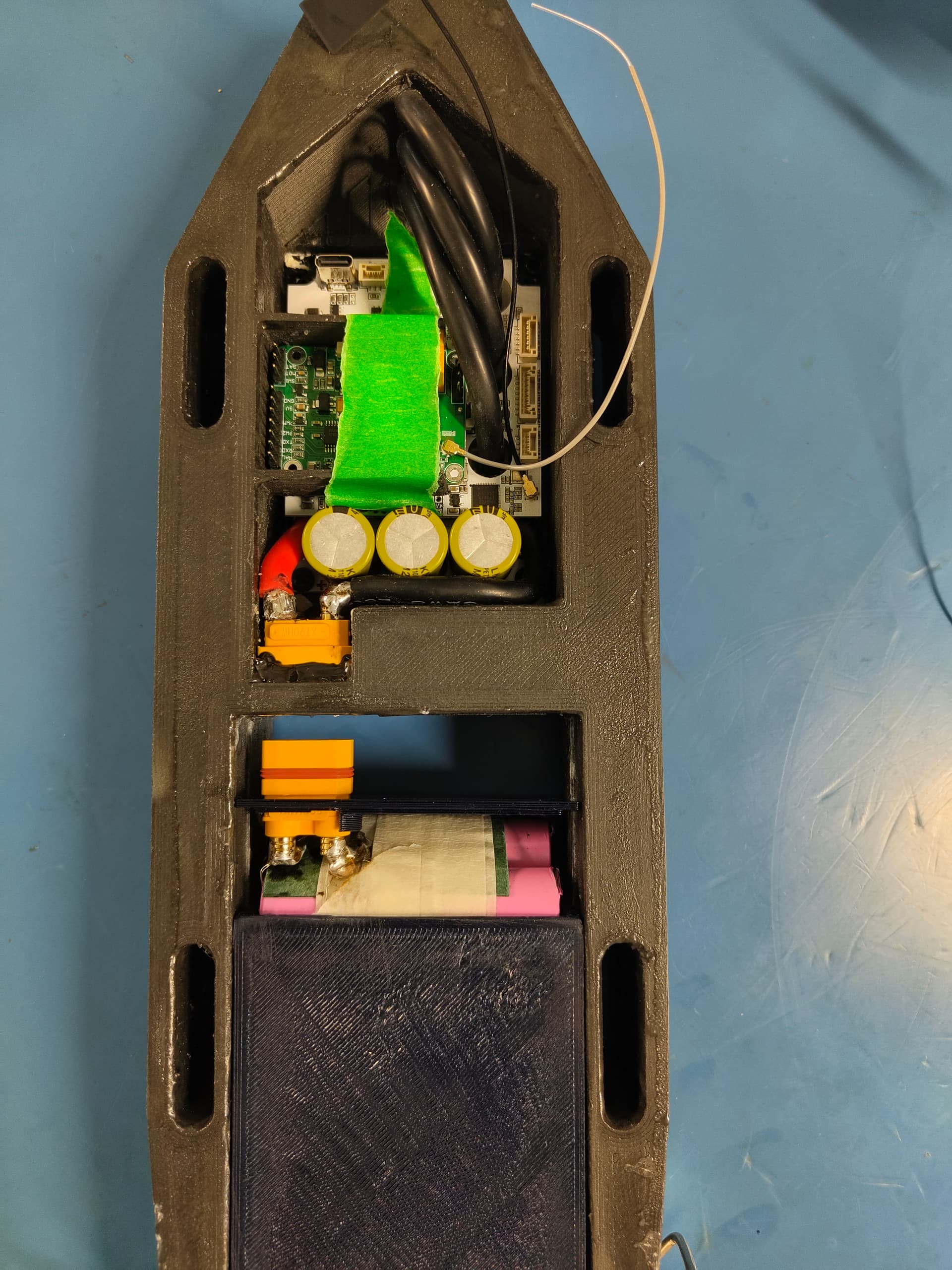
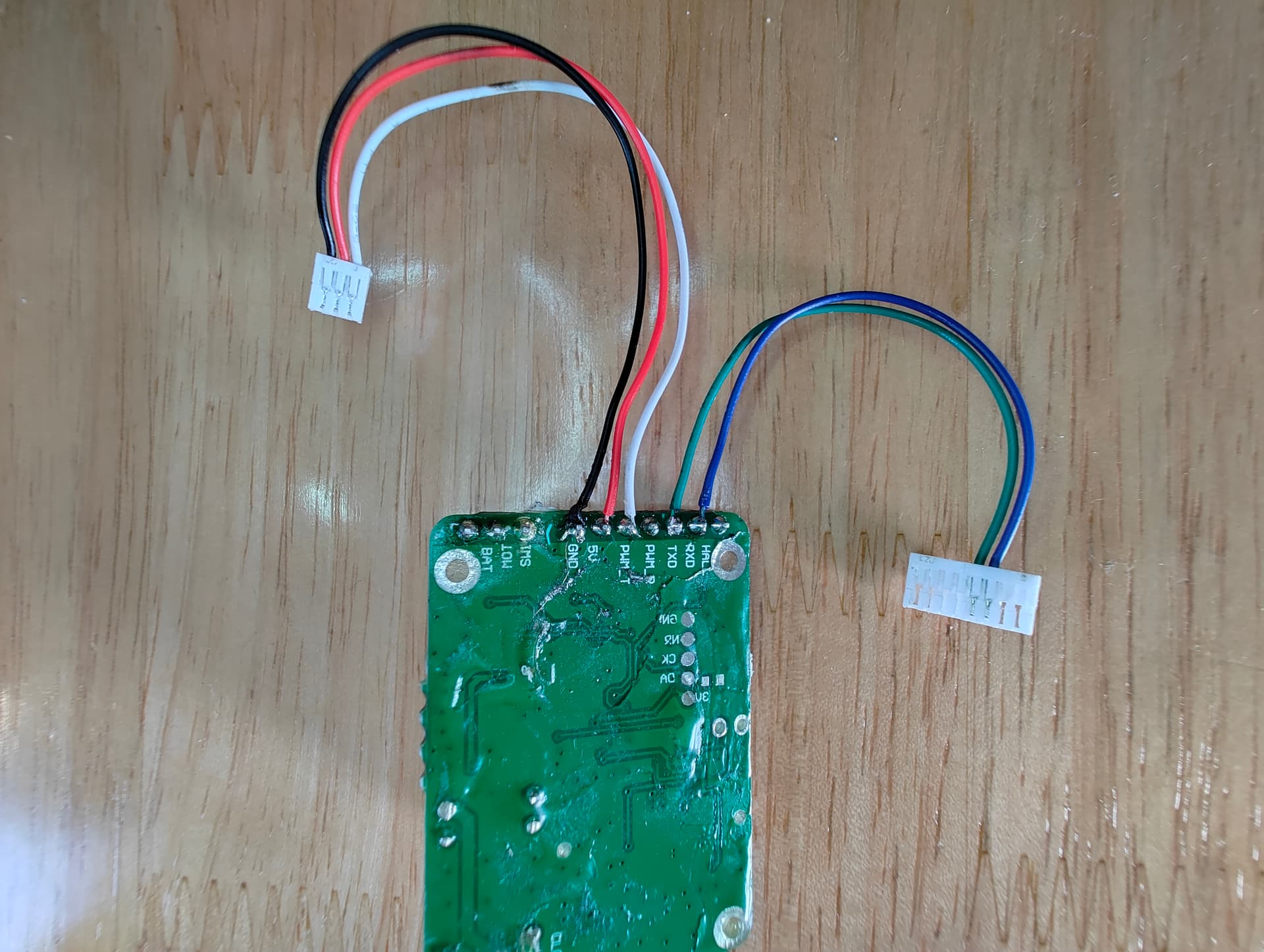
Tested uart, bluetooth and motor before casting.
For the antenna, went for as close as possible to the board surface.
Not conviced by the gel, it stays very soft, it will be a mess to handle with Sand and dirt.
Missing the pogo to finish it (battery side)
For motor setup, I went with max 40A battery, and 75A phase. The motor spin crazy fast in the air, I fear it will not reach an efficient RPM range in the water on the three blade.
2p 30q is 30A max, 40 is already pushing it.
The vesc gives you a pretty good idea of the saturation current during the auto detect, and for the maytech it was giving me 65A. (Rms/peak is never so clear to me on vesc)
On my previous setup, I could start with a 1050cm2 foil and this board, with 65A batt under 7s, or a max of about 1600w. 40A under 12s is the same power. I used much higher phase currents then, I will see if it helps or is needed on 12s.
With BT, it will be very easy to change on the fly.
I read that the vesc current equals the current vector length - which i interpret to being rms, not peak. I think your phase current is too low but we’ll see🤞
Did the cast, with extra space to wire the pogo later.
Used 170gr of epoxy, more than I though.
The battery box should be open on the top and not the rear. It will be much easier to cast, and to print.
First test went OK, but the Magic gel was sweeping all over the place, and providing zero structural strength.
Damaged a cap due to the xt90 of the controller coming loose.
Signal IS very Bad, I could only start with my arm under the water close to the box .
Managed two starts, then I could downind motor off. That was quite cool as the weight and balance was great.
Trying to keep the model up to date with my findings.
Top cast for the battery, antenna channel, changed the cut location between battery and controller to prevent the latch from bending due to the lack of support.
Removed all gel, now casting in epoxy
@rttn thanks for the tip, I did a channel to try it where you recommended.
My electronics is fully waterproof with epoxy enamel only. Applied with brush after I thinned the epoxy. Nice to be able to replace a pcb at the time when they break down. If it helps.