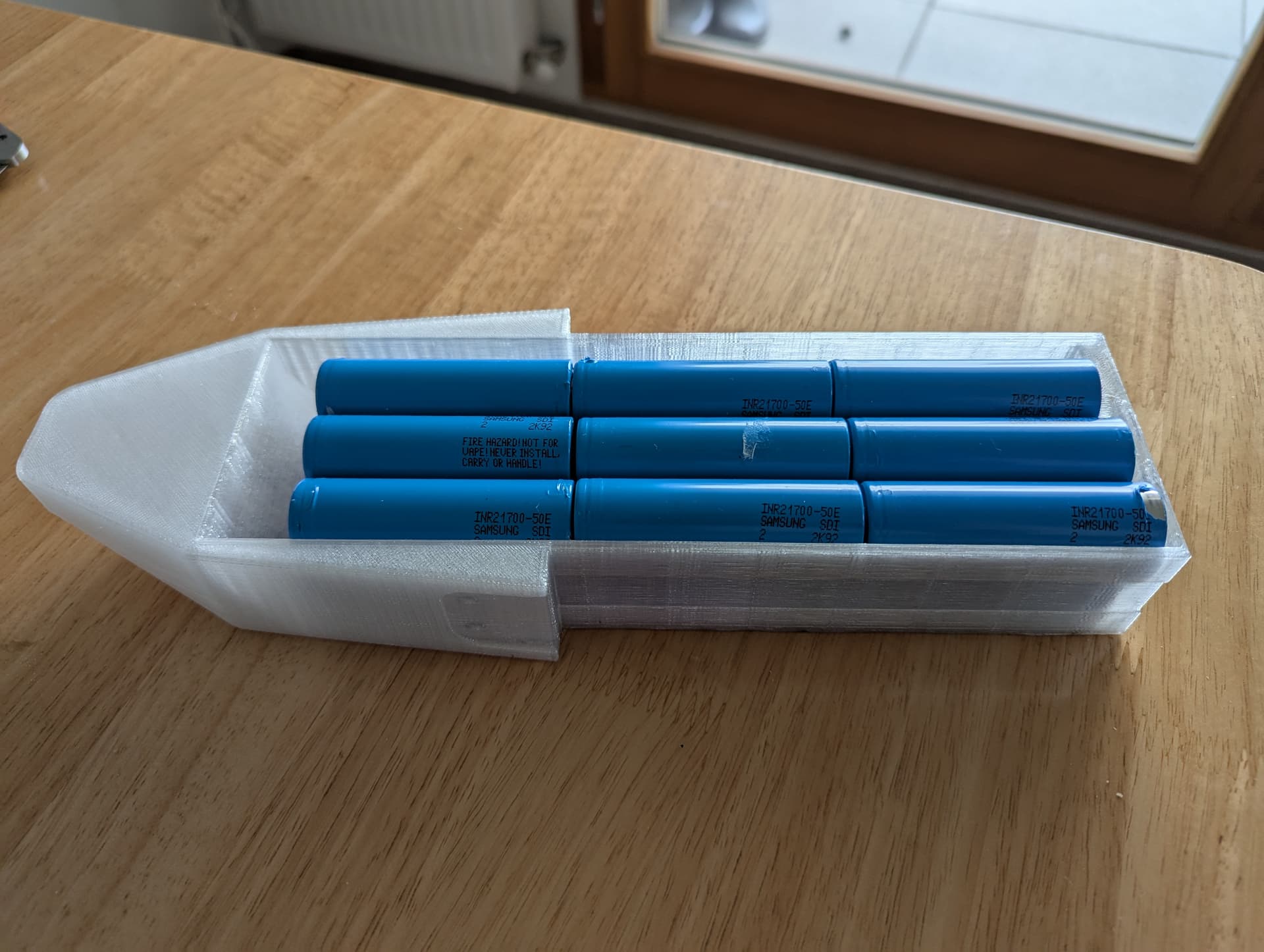
18x21700 cells somewhat fit in this configuration, it is a bit tall.
9S2P would work based on my previous use on 7S4P.
Not fan of such configs to do the welds!!
Liking the frost/transparent look.
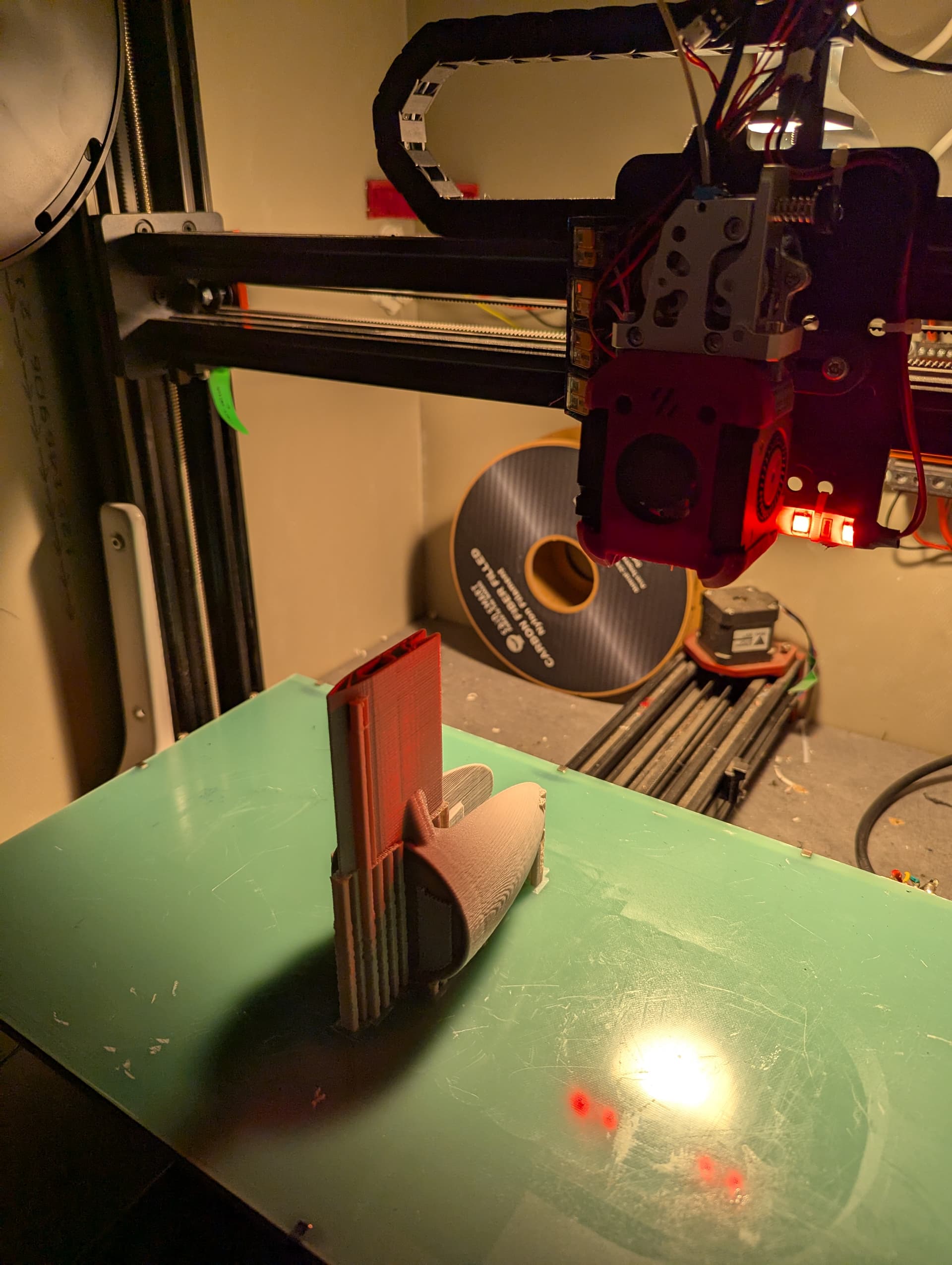
Batt Box prints with zero support.
The new 21700 BAK tabless cells as tested by @lishine are very interesting to me for tests and general education about new cell developpements. (especially VS MOLICELL).
up to 190A phase (peak, reported by vesc)
That is in no HW limits mode, and with special high current mode enabled to measure only on two phases at once.
150A peak is safe, if the motor parameters are well detected and configured.
Battery max continuous we tested was around 50A. Continuous is 30 min +, peak is 30S+ as per automotive standards.
Our commercial product motor runs 110A phase on those 84100 under 14S (checked the actual settings, 120A phase and 100A battery is our validated delivered setting. > 17.5N.m at the shaft)
Here are some projects we are working on on proto phase :
one with X2 MIC-2000 (84100HP) and 2x 14S4P EVE 50E, up to 350 kgs 45kph (3 vehicules)
one with 2x bigger motor and silixcon controllers ( but ), 2x 14S10P P42A, 250kgs, up to 90kph. (5 vehicules)
Other projects I can not talk about
Wheels on the ground is generally harder to control than prop driven applications, where a good prop selection can prevent from the need of phase current sensing and limitation.
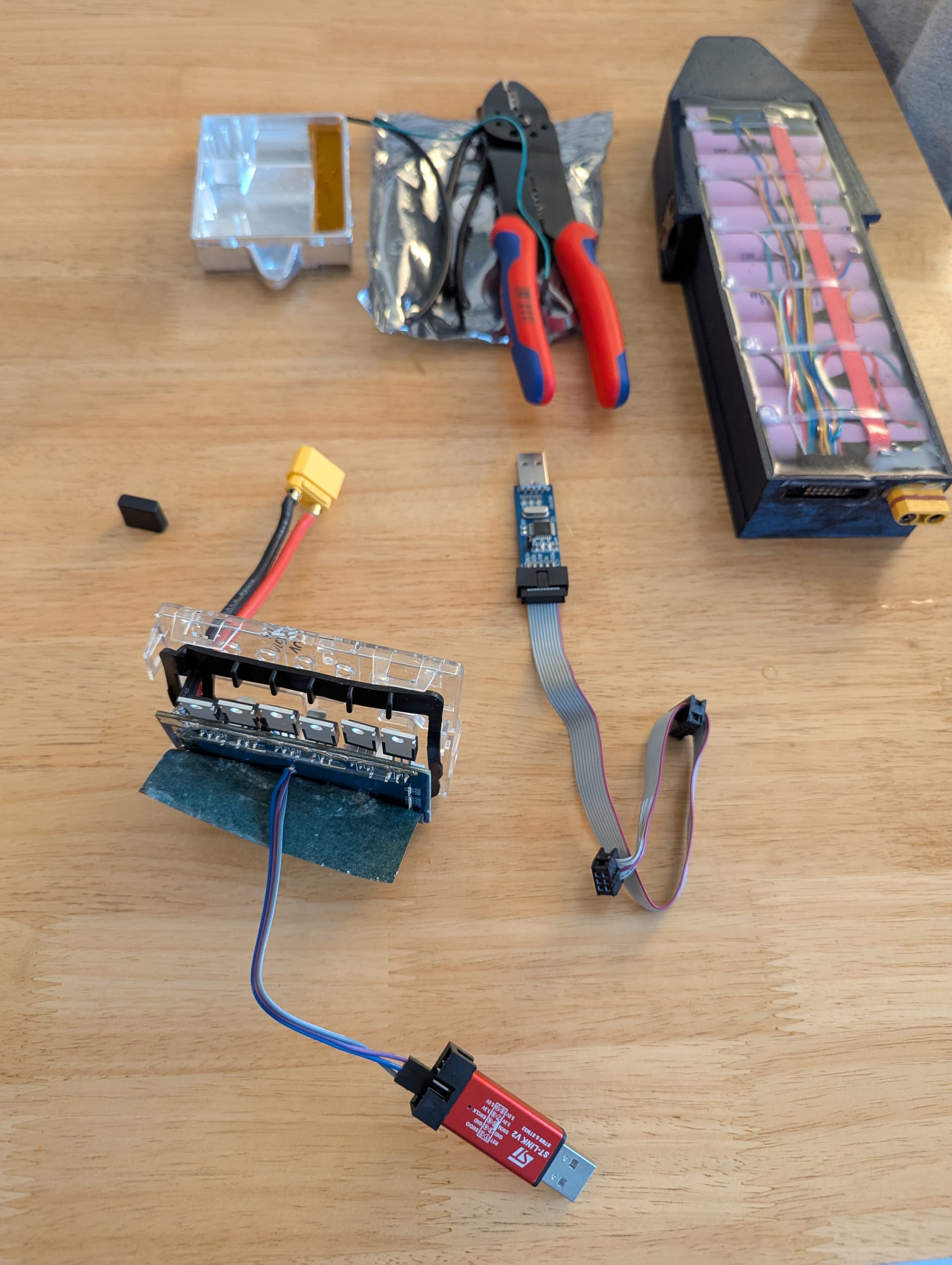
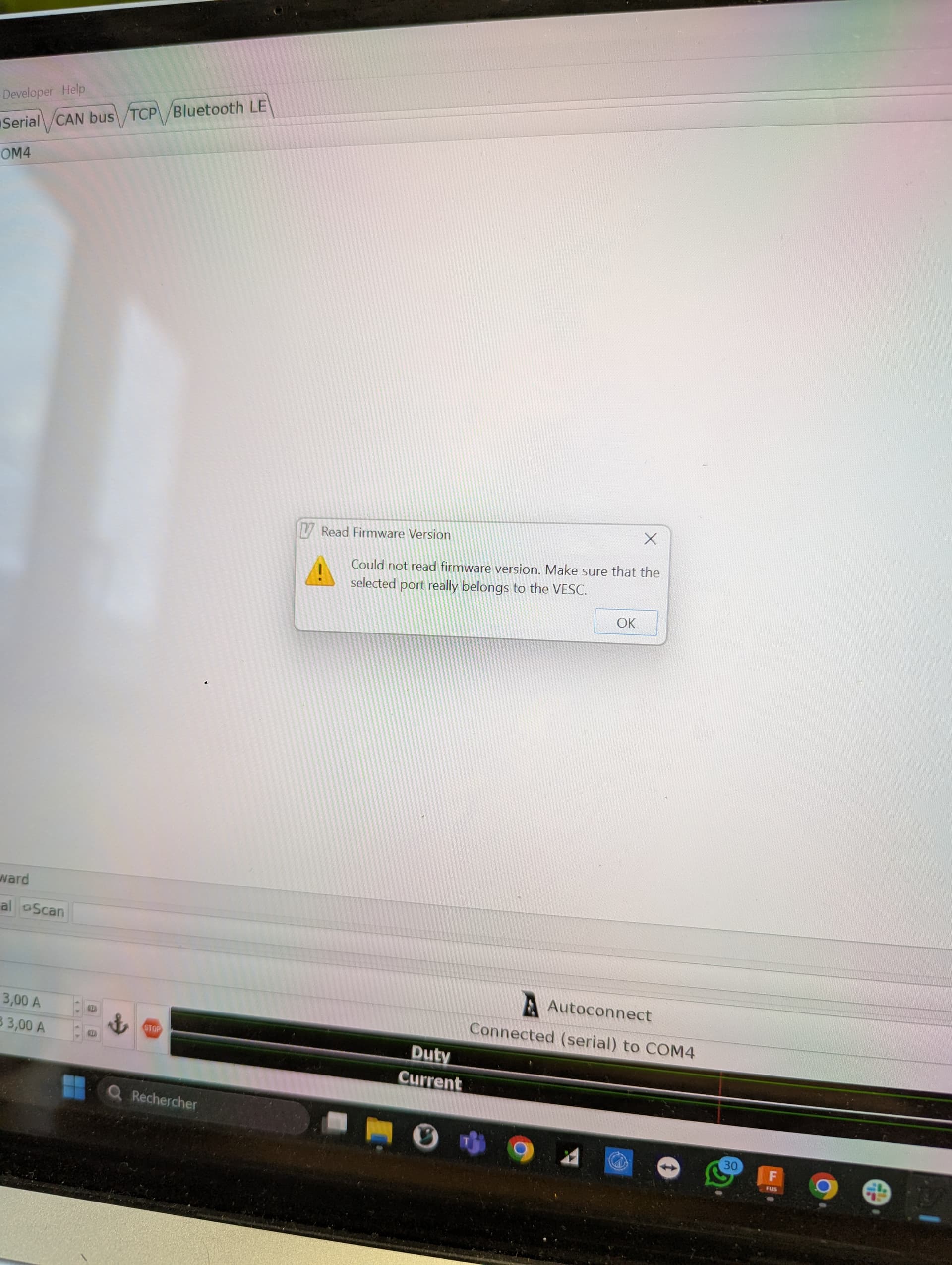
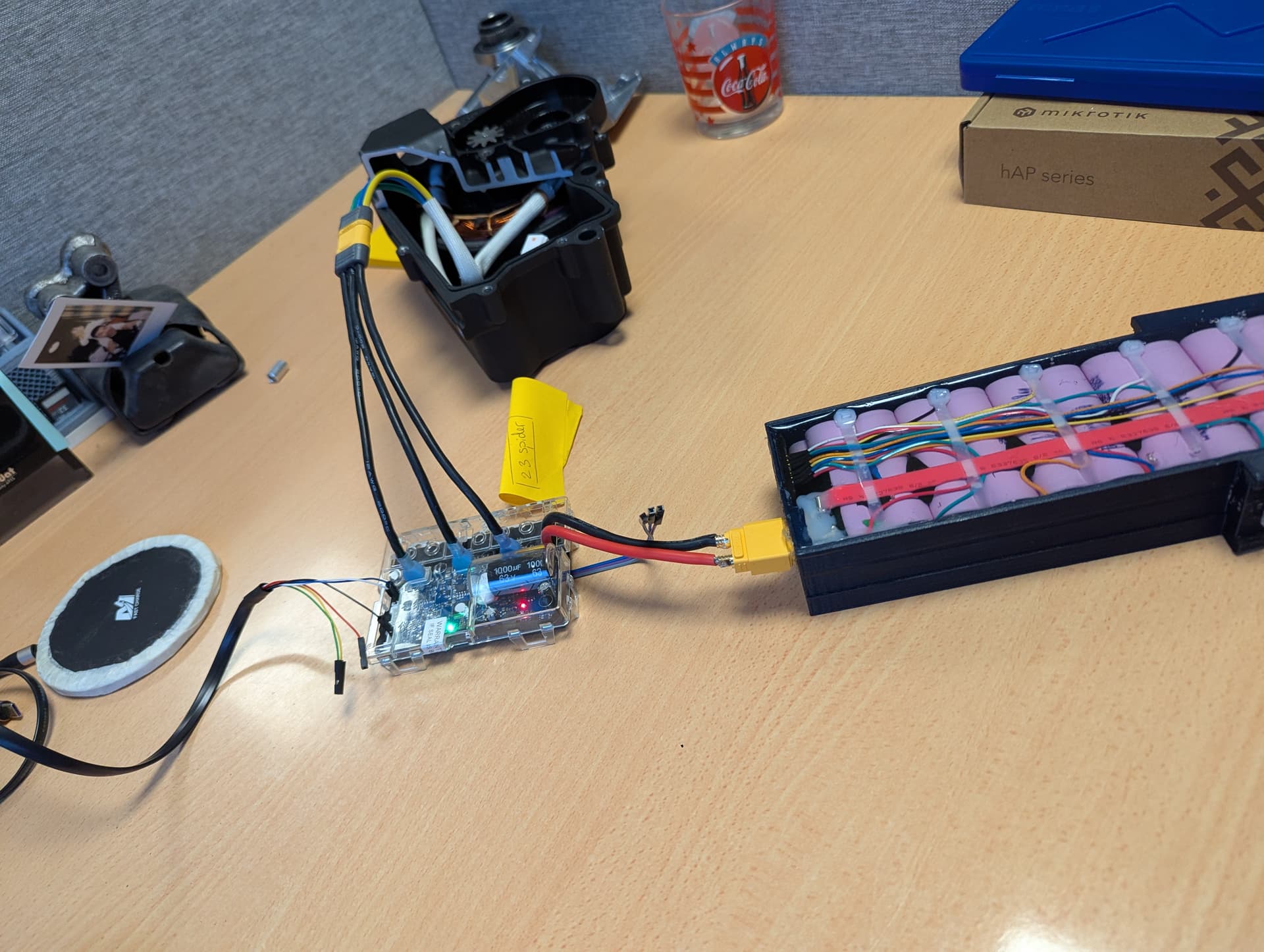
It seems like my under baord assist controller has failed.
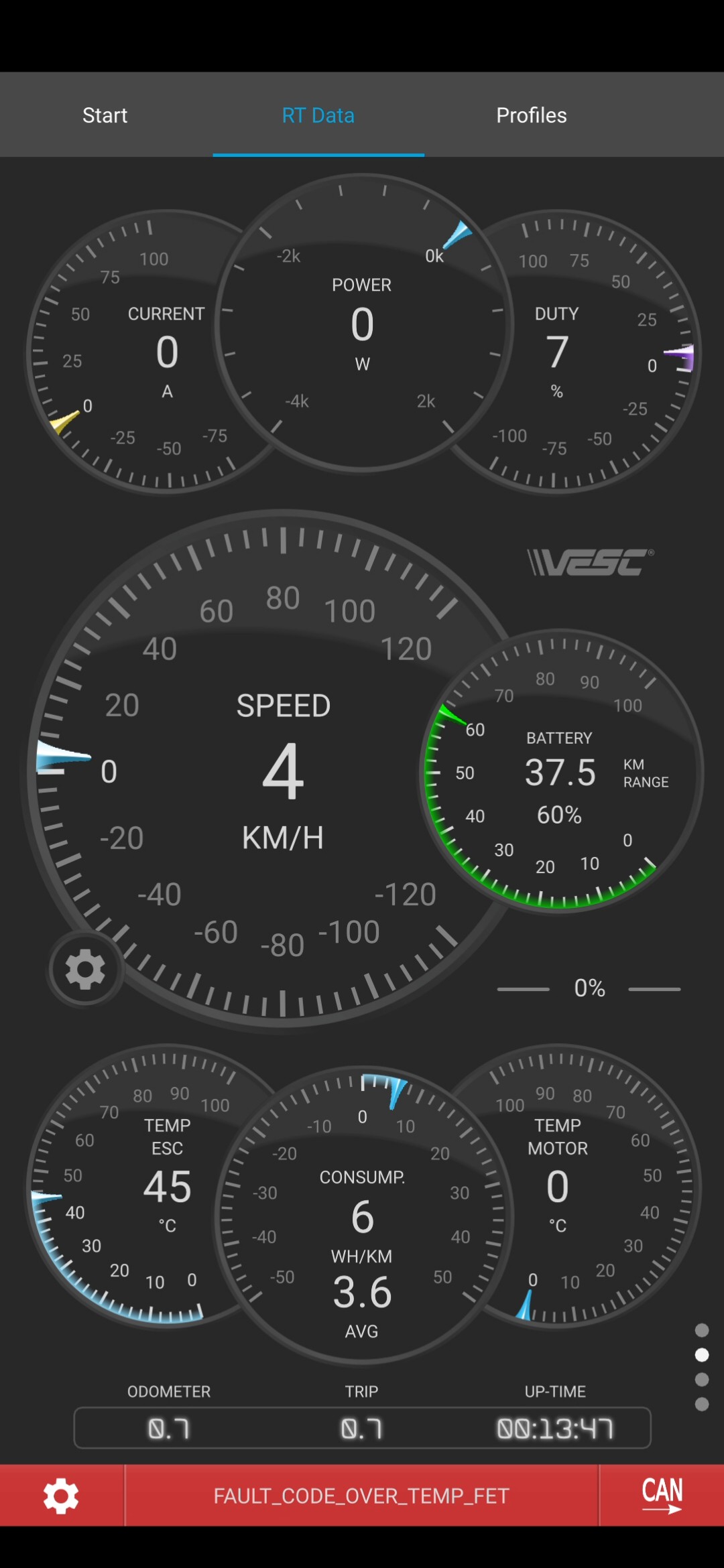
When I use some throttle, the motor does not start well. When connecting the app, I see that the mosfet temp reading goes high whenever the throttle is applied.
Ambient temp was 11°C and the value would drop to that when throttle was released.
I tried to set mos temp limit to 190°C (max of vesc tool) but it seems the read value is out of bounds.
I am pretty sure it is water/saltwater creeping under the epoxy and contacting on the temp sensing component, they are located close to the phase output voltage measurements.
All 6 MOSfets test OK, and I tested with two different motors to make sure it is not something else.
I removed the epoxy and could see some humidity below.
Now sanded down all epoxy and drying the system, to see if the issue can go away before I re-epoxy cleanly the parts.
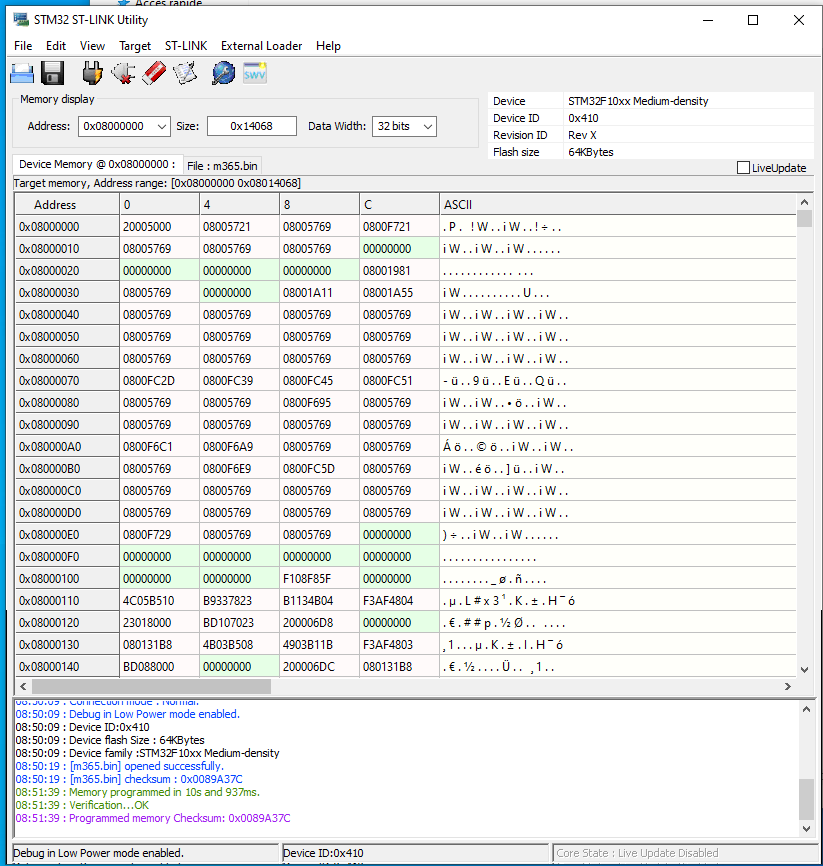
The temp sensor issue of the vesc seems to have cured itself after drying on a heater at 35° for a few days.
Will have to do a coat of thickened resin to seal it up again
4th battery with the alu prop and pa12 hub, working well for now.
In 7°c water, but sun and no wind.
Pure Pump session then > assist pump
At the moment I only have the 1201, and today it was very limiting as the start dock is very high, and drop starting the 1201 is outside of my league for now.
The controller did not give issues, after it was dried and sealed again.
Preparing cells now for a 12s2p with 35E salvaged cells.
More sag, but more capacity and stable cell behavior.
All cells will be tested on opus tester for capacity and fluke meter for IR.
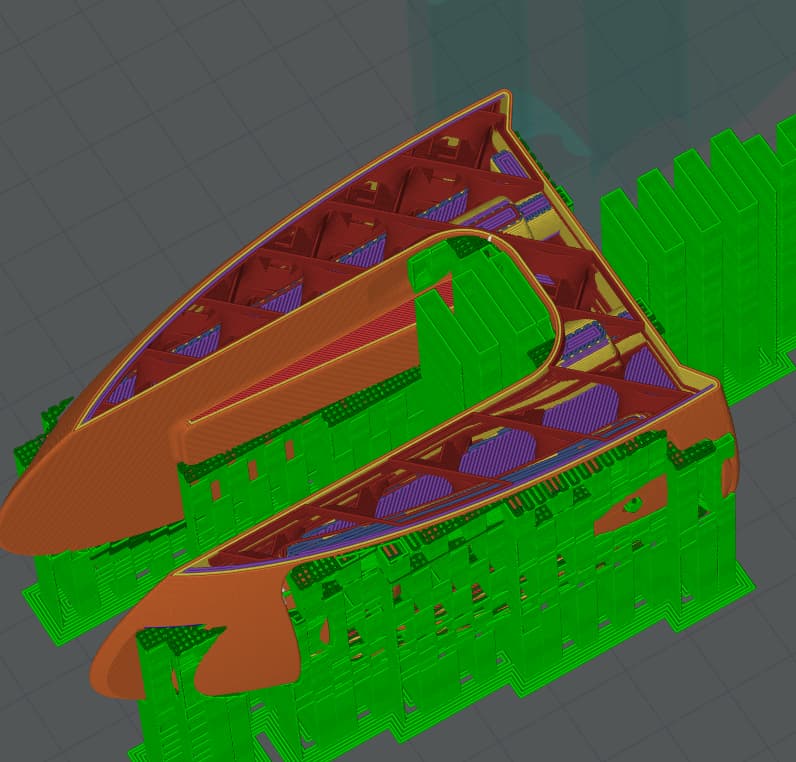
Preparing a new shorter pod to run the motor higher.
My current pod have already been reinforced with carbon fiber and CA glue to keep it from splitting, but has now a good crack due to cold water I suppose. I dont want to loose a motor and printed prop, so a new hub is needed.
Took me 30 minutes to get the efficient moves again, and lift myself instead of pushing.
did not record the full session, but here is a view of my updated GPX tool, available packaged as an EXE now. Deepseek went 1 step further than Chatgpt in the implementation, now in a web browser with python backend
Local Indiana dealer and friend was also testing pump assist with a 36 lt board and stoke foil setup. He was getting the hang of it by the end of the session but the stoke seemed to have a lot of drag. The remote looks nice
For added protection of the soldered phase wires inside the motor, I will fill the 6384 base with epoxy and route the wires through a PETG guide into the MT60 connector.
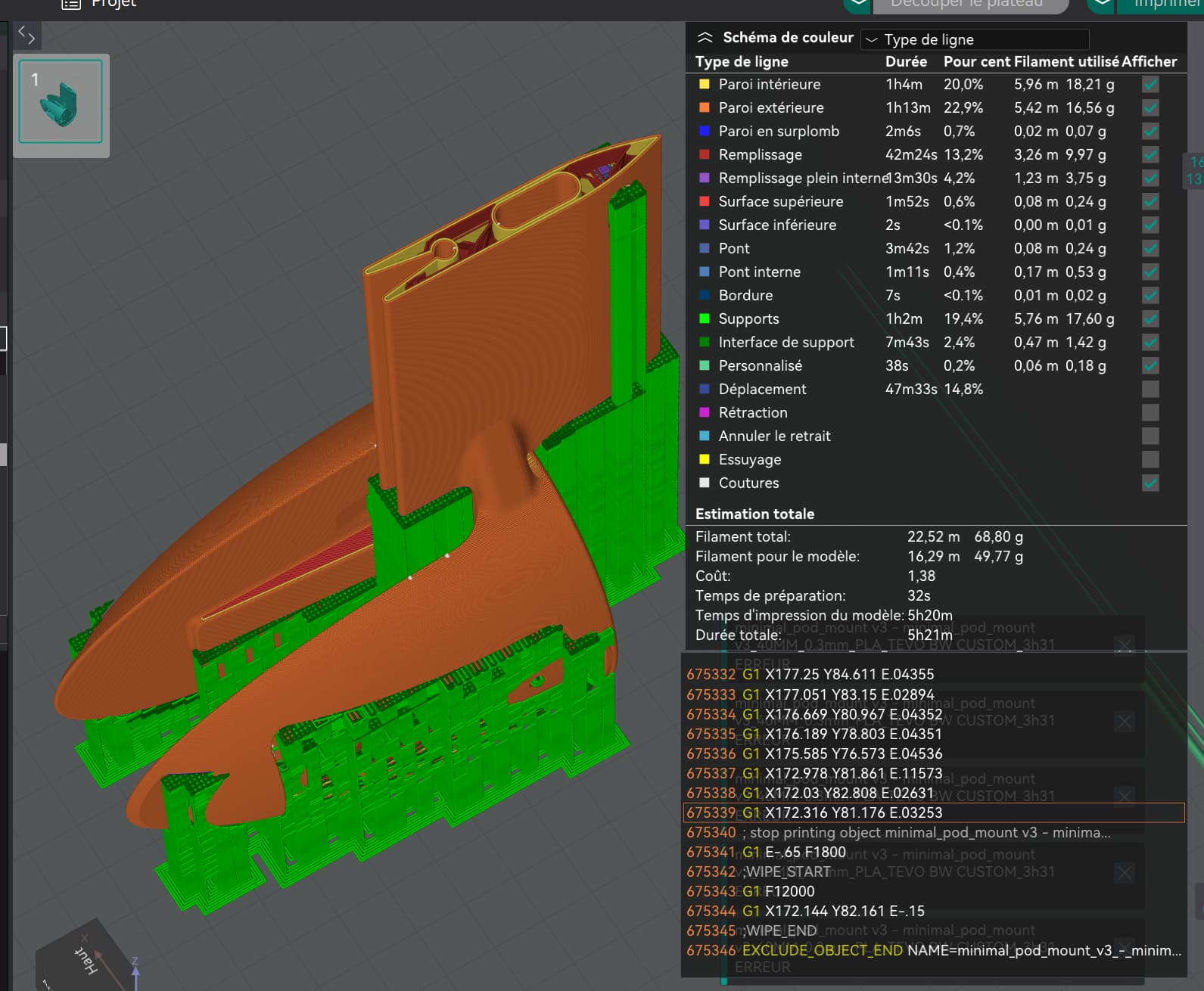
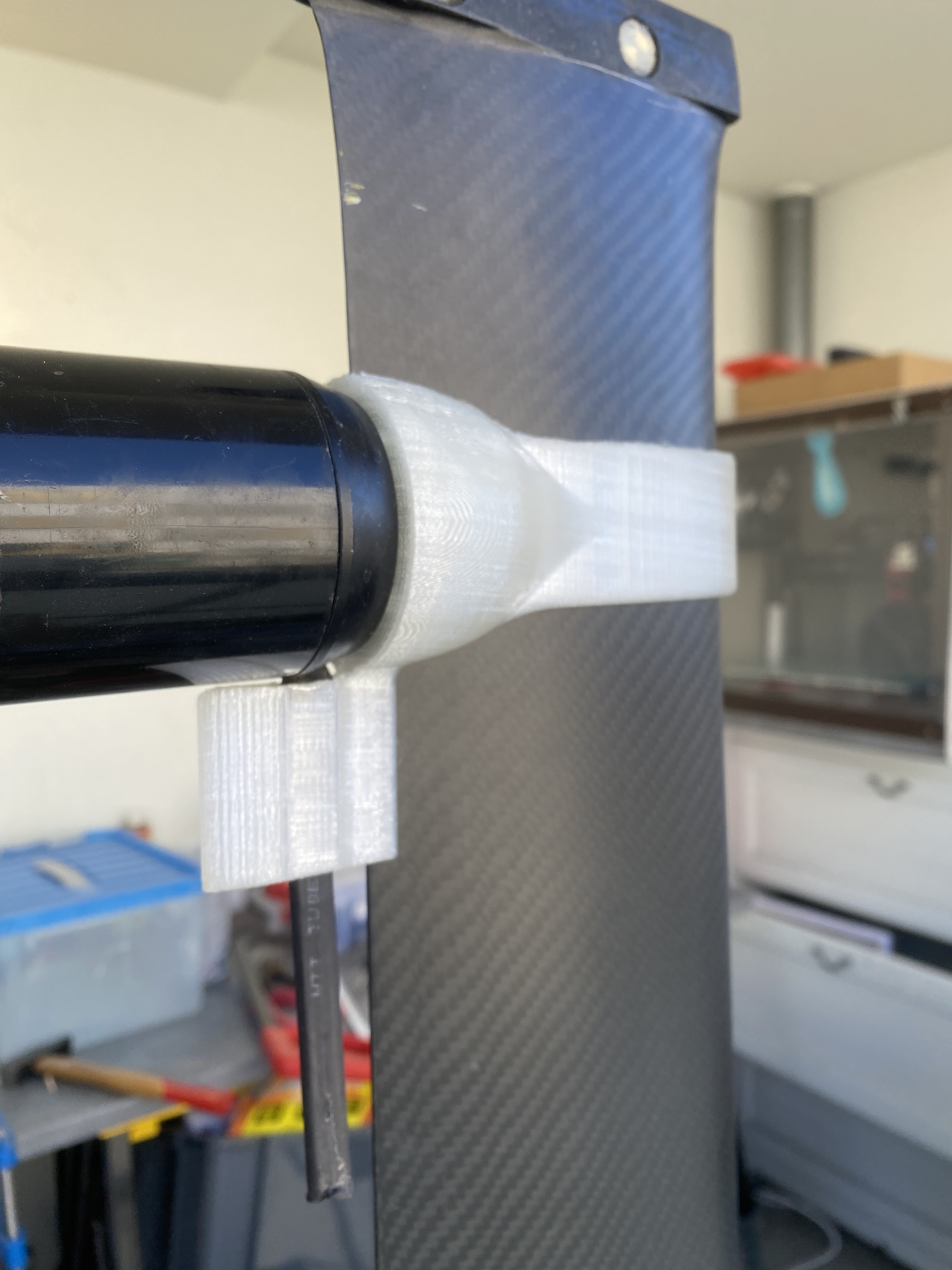
Here is how things are looking with the flex mount as we discussed with @lishine
I did not adapt the length and as a result it does not fit the wide top part of my mast.
Tried to stretch with hot water, and heat gun without success. At least I know it is strong!!
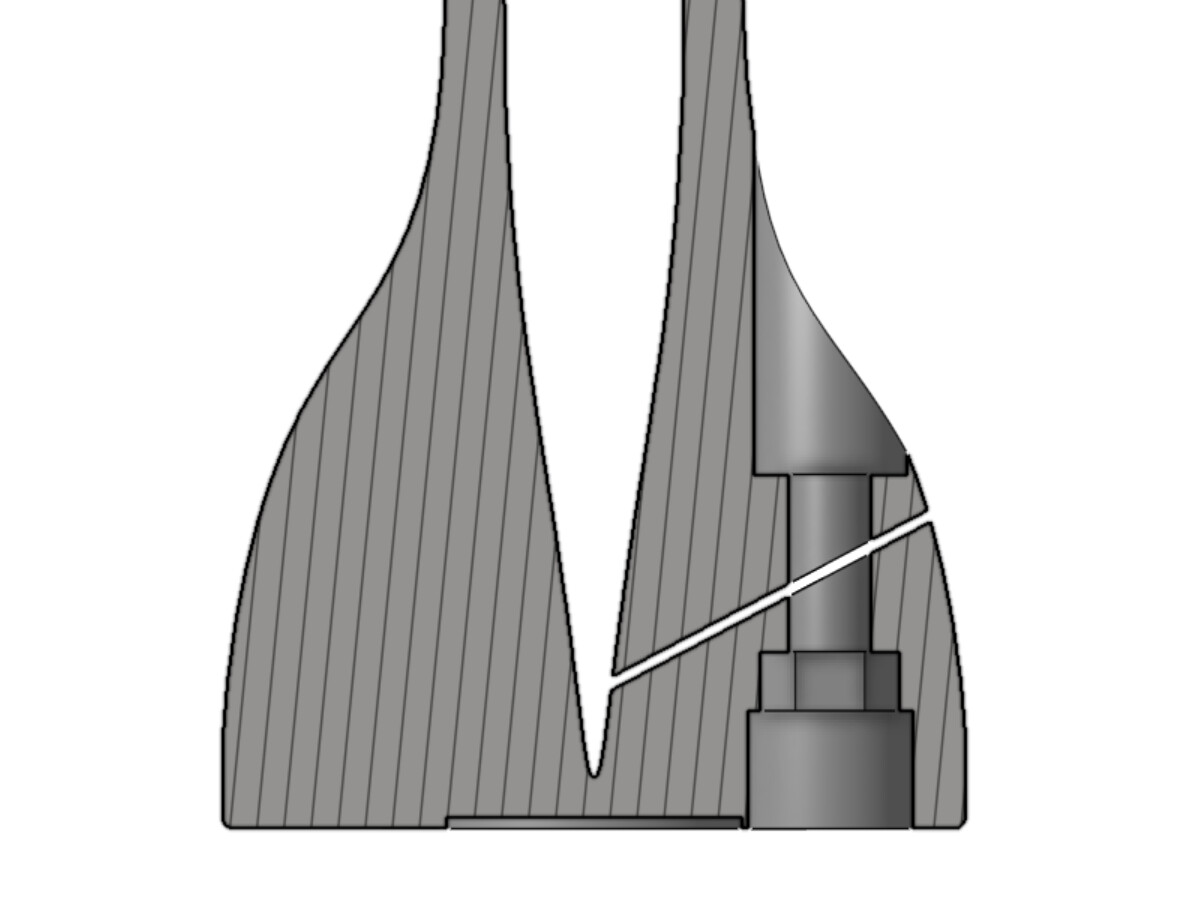
Modified to fit upside down flange nut, with room behind the nut for the bolt tightening.
Modified the length for fit my mast thick part (+20mm)
Modified the 4x m4 bolts pockets to fit 12mm screws I have in stock
Will re-print according to this new file (14h / 170gr print)
Great that it is strong… I hope that one bolt for tightening is good enough. If you try to rock motor up and down, you may see edges lifted.
The other side is fully attached, yes, in case when motor bolts coming from the outside it is possible.
Question is maybe somebody can calculate the impact on drag of these holes… How much more drag in percentage relative to motor or relative to motor+mast. Hard to compare because mast and motor assume gradual surface drag, where the bolts in the holes are blunt flat…
What I learned is that tpu is pretty beneficial anyway for not transferring vibrating, at least to the surrounding plastic shell or to the rest of the system.
I will probably fill the 4x M4 bolts with hot glue, so only the M6 hole remains.
My goal with this system is not efoiling, I will be on motor only for a few seconds at each start, i’m really not worried about it.