Then none of my engines should be running 
Greetings Frank
You’ve coated all your motors in epoxy though haven’t you?
Corrosion x used on both motor and solder joints which were later double heatshrinked.
What exactly do you mean by sealing solder joints?
I sealed my underwater joints with silicone and then put heatshrink over the silicone to guarantee they would never short out. Them I dipped the motor in corossion X.
I tried the 6384 twice and both times got 10kph from it, but my ARC200 was set in the wrong mode, so I suspect it was down to that.I haven’t tried it again as I have multiple units that work a bit better.
I should really do the epoxy thing and treat it properly and try again though!
So reporting back from another test ride:
- SUP going without a glitch 8kmph @12A
medium throttle 9kmph @25A
full throttle 9.5kmph @55A
@V_S was obviously right and air is getting pulled in at higher RPM
When I shifted COG forward there was “cavitation” happening much sooner/ atlower RPM (5kmph @20A)
When shifted COG backwards there was much less apparent “cavitation” (prop got deeper) but nose of the board was so high that rear end was whole submerged and it was acting as a massive drag. But still even with such huge underwater brake I managed to reach 9kmph @40A 
On VX2 remote I tried changing on pole pairs number between 6 and 7 and there wasn´t any visible difference in behaviour. Upon @Alexandre advice I also changed “wheel diameter” settings to 49mm which resulted in wrong speed data - roughly 4x higher than real speed. Most exact speed reading gave 23mm settings.
So it is obvious to me that I need to move somehow motor much deeper into the water. I hope that extra 10cm will suffice.
1 Like
May be I was not clear with my idea , sorry ,
The purpose of having this numbers set in your remote is to give you the speed of your motor , not the speed of your board
It refer to the formula used by the remote and the pitch of this prop , so it is important to set the correct number of poles
Of course it will be really different from the gps speed , but the display will show the speed in a perfect world without cavitation drag slip …
So if you get 4x the gps speed , this means that the motor turns well , you get the rpm , vesc isn’t limiting
Just that your prop isn’t pushing water and probably air
49mm is just the pitch of your prop converted to a wheel diameter
Very nice video
No, I am sorry. You were perfectly clear. I just got somehow lost in numbers over the night
Appreciate your help and I hope next time after rebuild I will report with some better result aka SPEED!
After moving motor deeper into the water (some 25cm lower than previously) there was absolutely no air getting close to the prop even on full throttle.
Unfortunately I reached max speed of 11 kmph @21A. Half throttle was around 6 kmph @6A.
So efficiency wise quite big improvement, very quiet ride - no vibrations at higher RPM.
I am clueless why I am reaching such low speed 

Should I tinker some additional settings in VESC tool?
My current settings are default, just altered:
Motor Current Max: 90A
Battery Current Max: 99A
Absolute Maximum Current: 150A
I am just wondering why after doing new FOC I got motor current only 53A:
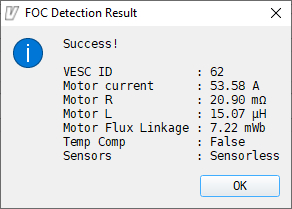
and on first FOC done with this motor I got following:
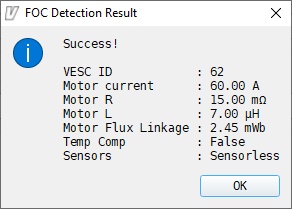
Notice flux linkage difference: 7 vs 2 mWb, resistance 20 vs 15 mOhms
Could that mean anything?
Yet another test ride - this time I made following changes:
upped Motor Current Max: 120A
Invert Motor Direction: True
Changed motor direction in VX2 remote from RW to FW
So result is still the same motor direction but was just wondering it that Rear direction on remote is not somehow limiting something.
I have no clue what settings change really helped nevertheless I managed to reach 16 kmph. And I have to say that when standing this speed is already quite enjoyable.
Measured values are following:
6km/h 4A
7km/h 6A
8km/h 13A
9km/h 20A
10km/h 25A
12km/h 32A
14km/h 40A
16km/h 45A
I still wonder why I cannot draw more amps. Will have to try 3 blade prop anyway. Less efficient but I might reach holy grail of 20km/h ![]()

1 Like
You only hitting 45A as your motor current will be 90A at this stage. Up your motor current to 150A
Is it safe to set motor current max higher than manufacturer’s (90A) amp rating?
Somehow I expected that when I set motor current max to 90A it will let me reach 90A in the field as well.
Manufacturer ratings are max , so pics amp , for how long ? No one knows : 30s , 2 min … and it is in the air
All different in water , so it is a matter of cooling I guess
And it is not because you set 90max on motor that you will get 90A , it depends as well as duty , max batt and the work of the prop
I thought you had the 200a flipsky vesc?
I have. I was just concerned to to set motor current max above 90A not to fry motor.
The motor is sitting I. The water so cooling is pretty good. Set the motor current to 150a and battery current to 100a and see how that goes.
Will do that and report back. Thanks.
I can report success reaching desired 20 kmph. Upping motor current max to 150A allowed me to draw 77A max (at least that´s the reading on VX2 remote) which gave me 20 kmph.
Really appreciate everybody’s help. Feels like flying, almost ![]() And while standing it even brings tiny bit of adrenaline. When riding all my hopes are vested into concom´s preservative abilities to protect my remote precious. I had few dives and so far so good. Just my daughter is increasingly curious what is the function of that tiny empty tip of remote´s water protection
And while standing it even brings tiny bit of adrenaline. When riding all my hopes are vested into concom´s preservative abilities to protect my remote precious. I had few dives and so far so good. Just my daughter is increasingly curious what is the function of that tiny empty tip of remote´s water protection ![]()

5 Likes
Happy to help! Awesome that you achieved what you set out to.
Hi, I really like your project and I want to build something similar, all the current/amp data you shared here is motor amps? I would love to know what battery amp draw I should expect and total wattage, thanks!
Hi, all I can say it is amp draw reported by VX2 remote that is getting its data from VESC. But I would say its motor amps which is what current is the motor drawing from the battery.