Vesc user , you can choose to run duty or current mode , you can set the slope of the throttle curve , you can play on the ramping time to add some delay to smooth thing … you can do a lot …
But no there is not a smooth start option in that case , you need to adjust thing in condition ( speed …)
You can only smooth the throttle by adding some play and or time , and my guess is that you will have more control over this on duty control ( rpm) vs current mode ( torque)
We will need a 3D mapping including rpm/current/throttle …
Til now i dont had any problems with it. 13S also works perfect for me.
The only thing i am a bit confused about is the high Temperature.
It still reaches 65°C in an ambient temperature of <10°C with the giant cooler. So i am wondering if this still works in an warmer Ambient temperature .
To switch the Boxes i use a watertight 3 pole plug outside of the box. This works great till now.
My 8364 got also the final bearing update. Like some others i am using the BB6800B18030GL and BB6900B18030GL from Igus for the radial bearing. But i used a H370FM101207 Plain bearing for the thrusterbearing. With a polished and reamered Steelwasher on the rotor side.
All my delta measurements till now show no measurable difference in powerconsumtion!
It works perfectly!
I also made several new Tests with the folding prop. But even the SLA parts could not resist the opening shock of the current regulated start. So i propably gonna try out a much stronger material.
The temperature of the vesc doesn’t sound ideal. I’ll be running continuous 20-30A in 30 deg C ambient. The makerx 75 / 300 vesc I’m using at the moment seems to get to about 70+ degrees, with only passive cooling inside the pelican.
How watertight is your heatsink on the outside (also on Alexandre’s build)?
Did you change the vesc to run with rpm control, rather than current, to save the props?
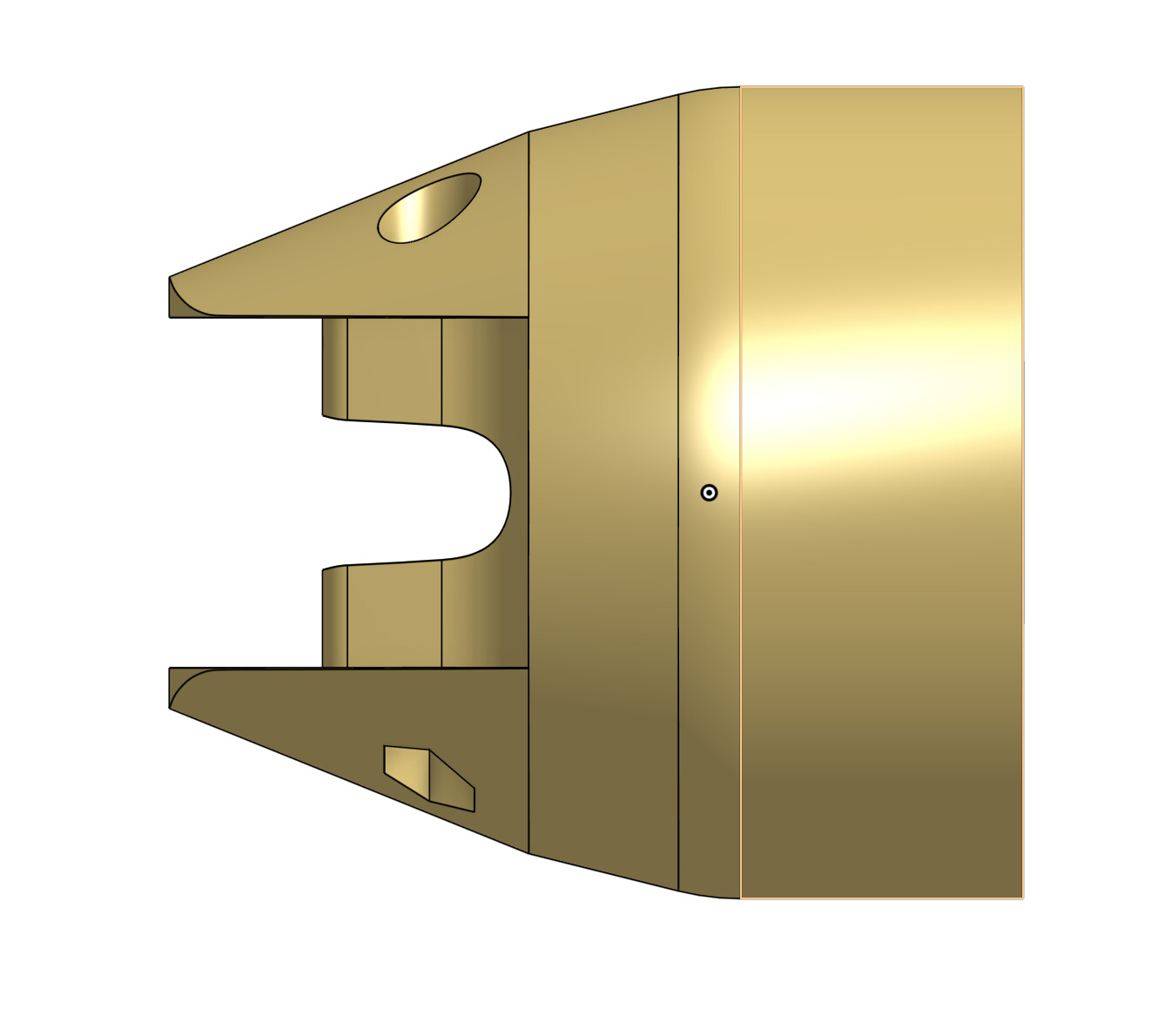
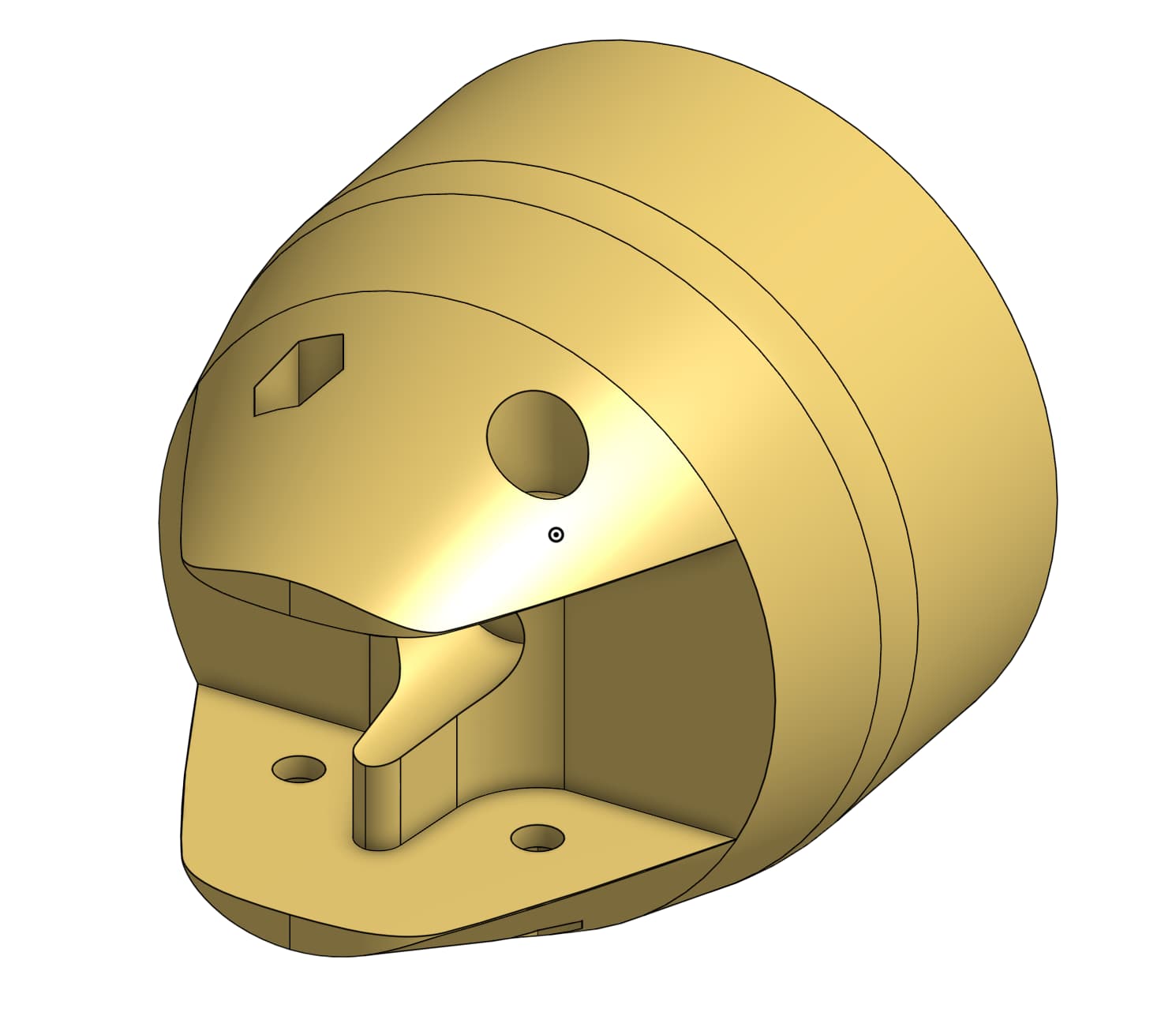
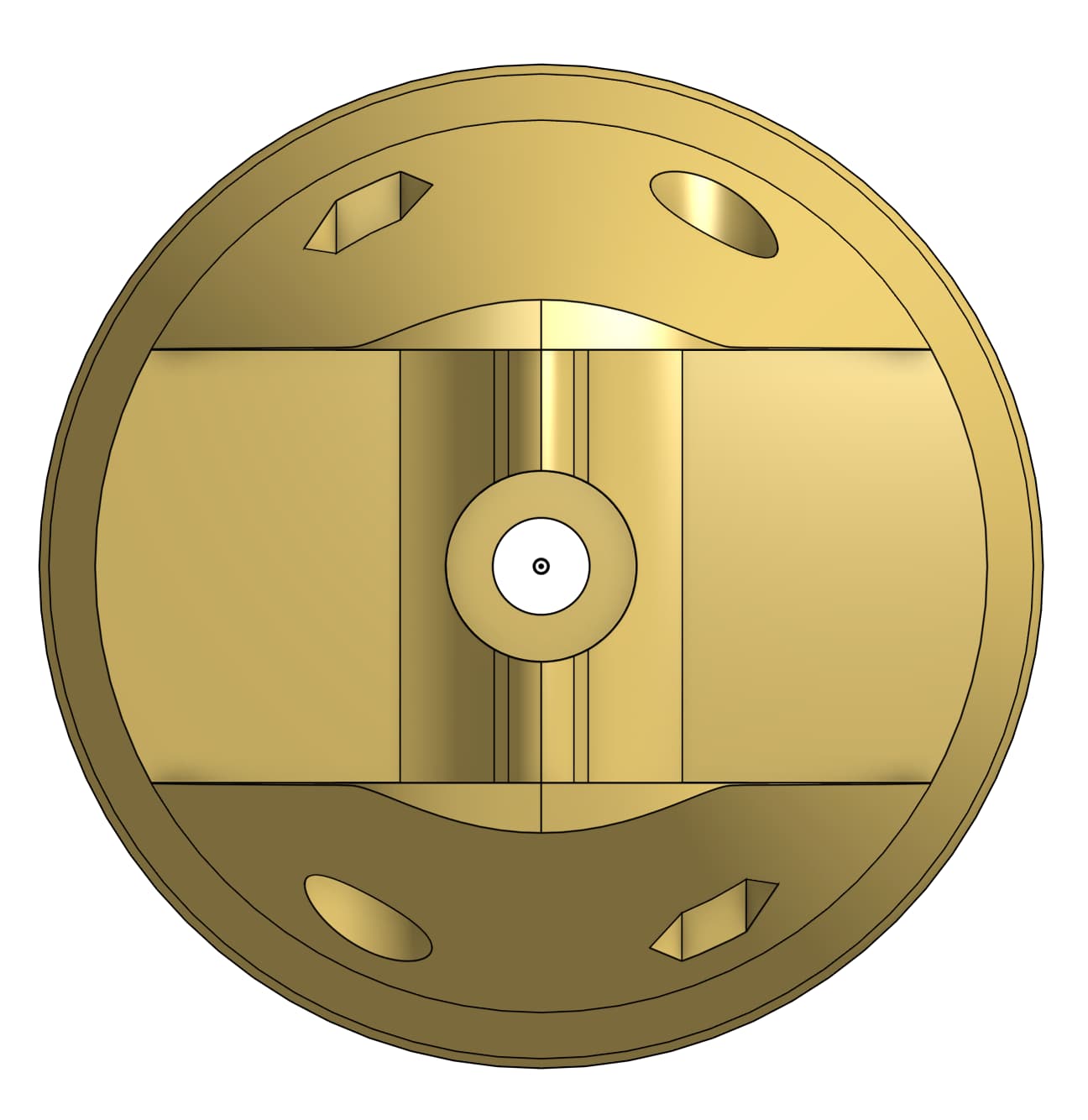
Got finaly a new working version of the Folding Prop. I tried a lot of different things. Here is the final changelog:
completly redesigned the blades to reduce mechanical weakpoints
also finetuned the tolerances to reduce sanding to ~1 minute
added a TPU 95A damping system
raised the printing temerature of PETG to 250°C for better layer adhesion
printed with 0.1 layers, 4mm walls and 40% cubic infill. No Support for the Blades with dual blowersystems
after sanding everything i mount the blades in the base and paint a thin layer of 5 min Epoxy on the blades (every part that gets not in contact with the base)
then sanded down the blades just a little bit to get a better surface.
Set my VESC to current controll with 4s delay in powerup.
This works just amazing for me till now. Its completly reliable for 4-5h till now.
Lets see how long this lasts but looks promising.
I find by google that page and love your design of the prop a lot. I was thinking about buying a Foildrive to add it to my Levitaz HA1600Pro foil and 100L Wingboard.
But the unhydrodynamic Prop is what keeps me off.
Does your Prop fit to foildrive?
I don´t want to build everything by by self and prefer to get it at least a bit plug and play.
from my point of view it should mechanicaly fit. But i am not sure if the blades are big enough for the rpm. As i understood they use the same Motor but with a much lower Voltage. The Prop blade design is kind of the most important thing when it comes to efficiancy!
There is a thread where people try to build foildrives on theyr own: Foil Drive Assist, DIY - #330 by Pod
Jeah, there would be so much nice solutions. But my main goal is to keep it as simple and reusable as possible. With my current setup i just need to exchange the Mast and have a full Kitefoil/Wakefoil/Surffoil equipment. I already have too much equipment and it tends to get more .
Also, in a foildrive the pod is meant to be out of the water once it’s finished its job, so having an inneficient profile is not important as long as your power is enough to start flying…
Hey Micheal, I would like to print your prop for my lift foil but I need to modify the file to fit the lift motor. Would you share the CAD files? I used the STL to copy the hub, but the blade is a STL and I can’t complete my assembly to check tolerances and fit. If not no worries but figured I would ask! Cheers, Theo
 .
.