ESC is essentially a pwm controlled pair of mosfets per motor winding, one mosfet shorting battery minus to one motor winding end, the other mosfet shorting battery pluse to the other motor winding end. Therefore the amplitudes of winding current and battery current are equal.
No, they’re not. Pick any log if you want proof, or read motor theory.
Power in = power out (+losses)
Power in=Vin x Iin
Power out=Vout * Iout
Now, Vin is not the same as Vout as motors are not driven in short circuit, and as you correctly say the voltage out is regulated with pwm switching to get an effectively lower voltage. To achieve energy balance the current therefore is higher on the motor side. This difference tapers off with higher rpm as more and more of the dc voltage is applied to the motor side to achieve the requested rpm and current.
I understand what you are saying.
I am talking about what is happening per pulse from electronics point of view.
Mosfets short battery to a winding during pulse duration t. Therefore winding accepts all the battery voltage for this duration. Because winding is an inductor, current starts at zero and rises linearly to some value at the end of the pulse (but not exceeding maximum esc current).
I wish i could find a shorter and easier explanation just like that but it’s too late ![]()
Motor current is higher than battery current up to nearly full rpm.
I see, so it acts like a step down. Motor is more than an inductor. Ok so I will have to read more about motors ![]() . Thanks
. Thanks
Yes, it’s also more complicated than this since there is bemf from the motor.
1 Like
very interesting, I try to take off with my boogie (dual motor flipsky 6384 / NonVesc FT85BS / battery 13S6P 70A max) I record the log on one side only, after 251s, full power, motor rise to 60A. after 2s the rpm is max, but not enough power to lift my 70kg on a 1200cm2 surf foil. I would be curious to see other logs, the current peak does not seem normal to me, and I wonder how the rotation speed is obtained.
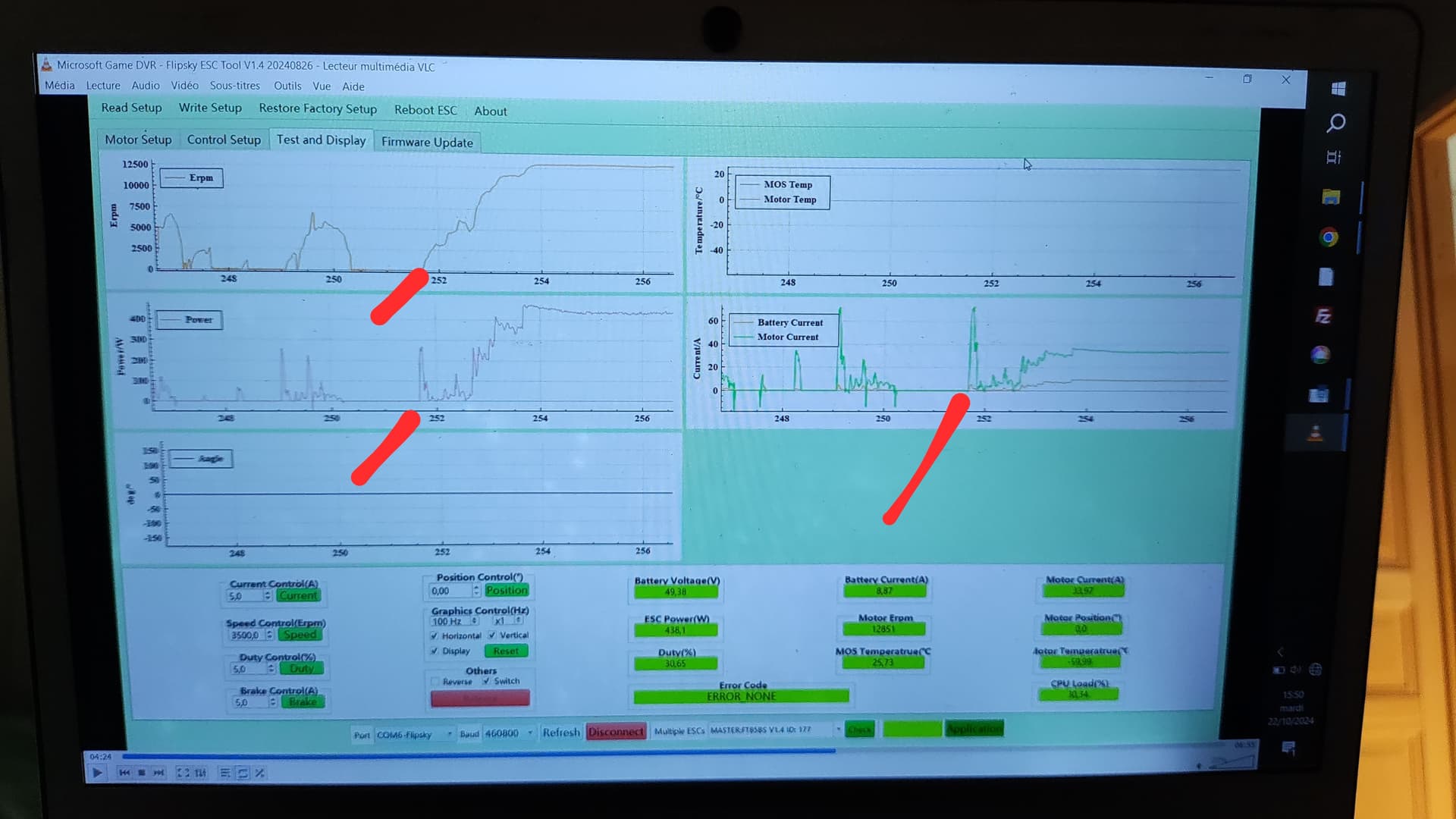
Several things, rpm for you with this motor is erpm/7 so rpm is only 1800 and the measured power is also only 400w. There’s the issue. Seems like the propellers are losing traction, flexing or sucking air - if there’s no rpm limit. Try the noload speed, do you reach full (kv x voltage) rpm?
thanks, why you divide erpm by 7 ?
I’ve just watch this video , 2 tests at 36V and 48V, not sur to understand the duty cycle, but that look I need a swimming for testing !

Erpm is electric rpms, and this motor has 12 slots and 14 poles. Each pole pair (1 north and 1 south facing magnet in the rotor) creates one electric cycle for the motor.
Therefore in one revolution the esc sees 7 electric revolutions.
In a formula:
Erpm=rpm x (no of pole pairs)
Rearranged for rpm:
Rpm=erpm / (no of pole pairs)
2 Likes
I am trying to get some references,
there are interresting nb here for a dual
[https://youtu.be/i0Kj06ytYMw?si=SLMc8G-osM2rkk0v&t=592]
Bat 50V 16A
Motor (D5064 200KV) 50A 39%duty 17M ERPM 780W
For those who would prefer to use ‘pre-loved’ battery cells, I’ve found salvaging from Dyson cordless vacuums are great as they also use high output cells. (35A in the ones I got).
Hi everyone,
what kind of commercial battery would you use on your tow ?
I know Tattu propose options like that. 2 x 6S (20Ah) for 1000 euros.
I’d prefer lithium
I use a samsung hybrid module like this:
Got it for about 250eur at the time. Not the lightest out there but simple and built like a tank. More power capability than you’ll ever need😀
1 Like
Waou ! incredible find Larsb.
It seems they are based in USA, did you manage to send it to Europe ?
No, i got the module from a friend who bought and split a complete ev pack. there were a few other sources in europe (last time i checked)
Commercial but probably not high production (likely hand made) 12s8p P42A Battery Pack | Transparent Series — MBoards There are quite a few e-skateboard makers who do 12S8P P42A from a quick google search.
These guys also have PCBs for battery 21700 assembly. 12s4p 21700 Battery PCB — MBoards
Hi everyone,
Does someone know how to make a propeller spin in the other side with the Maytech Remote please ? In order to change the course of the boogie.
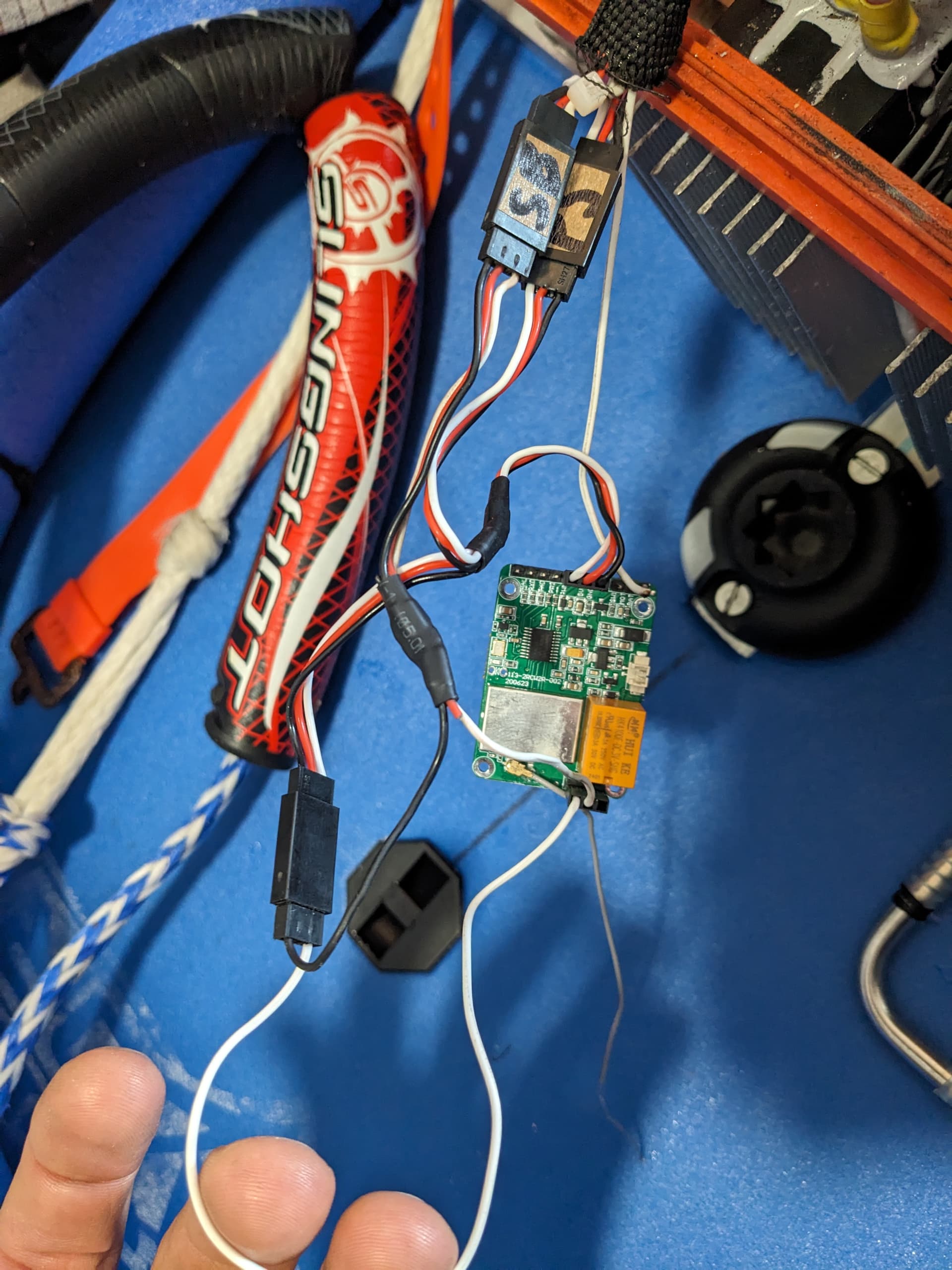
I know how to stop a motor remotely on a dual motor tow boogie with the relay/switch system on the receiver but I would like to find a solution for single motor. (Starboard motor SB on the picture).
You can cut the signal of one motor by pressing 3 times the ON/OFF button. It opens the switch controlled by the orange relay. Originally for lights or pump.
Flipsky VX3 pro remote has motor reverse function integrated by the way !!! Very good to know for single motor boogie users.
Go to ESK8 instead of ESurf Mode in the settings of the remote.