Thanks a lot for your feedbacks and suggestions on the remote. For some of your questions:
In esurf mode, the cruise mode works when the GPS is connected and when you are moving.
As for the trigger, thank you for @YAHEF’s suggestion, to make the speed more precise, our engineer will improve the 43 readings to 101 readings(from 0,1,2,3,4…to 100).
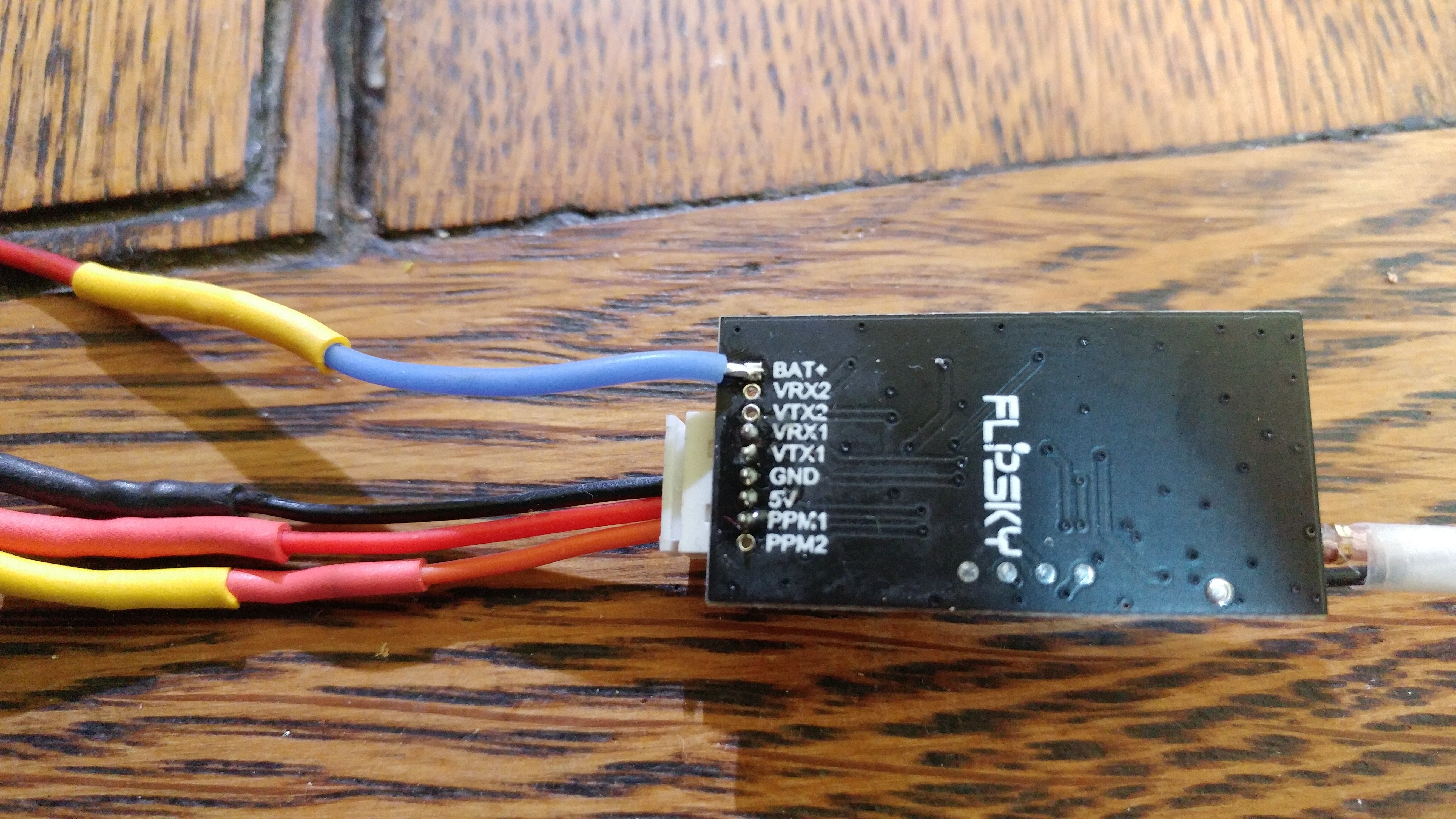
The remote VX3 is in 2.4g frequency. Regarding the antenna question, previous we found that whether we keep the 0 ohm resistor or remove it the signal effect is the same, additionally, considering that the VX3 uses the built-in antenna by default, so we retain the 0 ohm resistor on the receiver, otherwise the built-in antenna is not workable if the resistor it’s removed. If you need to use the extended antenna but feel the signal is interfering during your using, please remove the 0 ohm resistor. Sorry for not mentioning this before. In addition, some fiber materials might affect the signal too, to avoid this, if possible, please put the antenna outside the the enclosure or the housing, thanks.
Thanks again for all your supporting and kind suggestions and feedbacks on our product.
I would sample your ADC, convert to floats and filter then cast it as they do in that example.
Feels much better to have the trigger as smooth as possible. In the fpv drone work each stick is at least 1024 steps if not 2048 (transmitted over the air, on the transmitter the stick data is kept at higher resolution).
As of now the VX3 is using COMM_SET_CHUCK_DATA API and passes an uint8 value between 0 and 254. 0 is 100% backwards, 128 is 0% and 254 is 100% forward. Of course, in our case it’s only the values between 128 and 254 that are interesting for us since we don’t want to go backwards.
I have a function looking like this.
void VescSerial::SetChuckData(uint8_t value, uint8_t cruisecontrol)
{
Payload payload{};
payload.command = Command::COMM_SET_CHUCK_DATA;
payload.data.addUint8(127); //joystick x
payload.data.addUint8(value); //joystick y
payload.data.addUint8(cruisecontrol); //button c
payload.data.addUint8(0); //button z
payload.data.addInt16(0); //acc x
payload.data.addInt16(0); //acc y
payload.data.addInt16(0); //acc z
SendSerialData(payload);
}
In short, on the VESC side, the ‘joystick y’ value is mapped to a float value between 0 and 1 and multiplied with the max motor current, set in the vesc tool and then applying throttle curve, pos/neg ramping time and cruisecontrol
I guess the reason for Flipsky using this API is that they don’t have to code very much on their side, just have to map the throttle percent to a value between 128 and 254 and apply cruisecontrol when holding the break for 3 seconds
In order to use a high resolution throttle (more than 126 steps) the COMM_SET_CURRENT API has to be used. First, at startup the max motor current has to be fetched from the VESC with COMM_GET_MCCONF or COMM_GET_MCCONF_TEMP, then the max current can be used to map the trigger percent with.
Regarding the throttle readings, is 101 readings the best you can provide? As of my knowledge, the STM32 can handle 12 bit analog resolution, ref my answer to @brycej
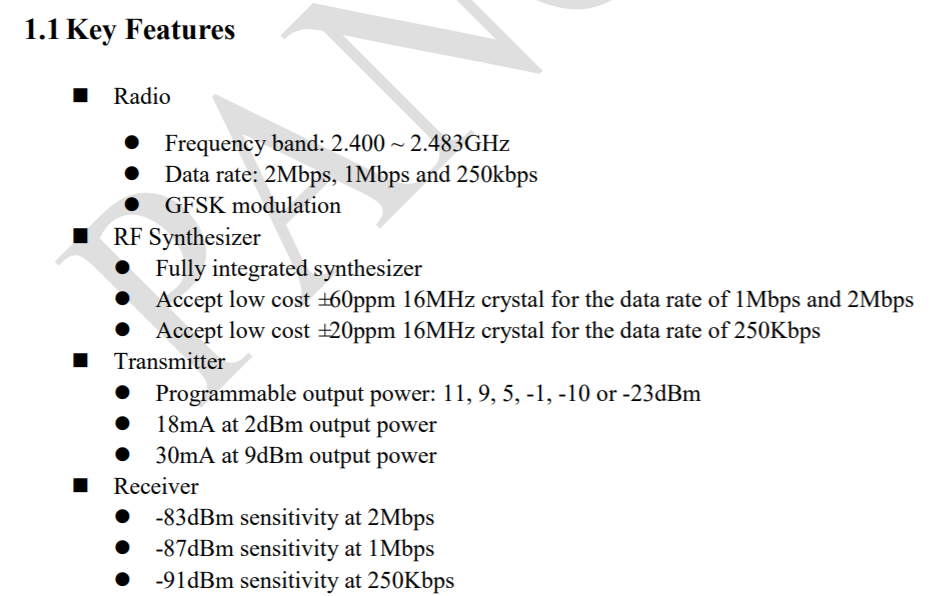
Regarding the connection issue. What transmission power are you using right now? According to the specs, the radio chip can be programmed up to 11dBm and I doubt you are using more than the default one. You can also ask your engineer to play with the transmission rate since a lower rate has better sensisivity.
Also I want to echo @nice2cu. You say you will probably have your engineer to change the firmware, will it be possible for us, existing customers, to upgrade to future releases or are we stuck with an old, not so good version?
Just updating: I finally got the VX3 to work when I went for a quick trip. I ended up having the watercooled VESC overheat because of a blockage in the tube so getting back home was a challenge (laid on board doing 2-3 mph). I could tell my speed thanks to the display! lol…
It still had some cut out when I was laying on the board. The enclosure was under water but my antenna comes all the way to the tip of the front of the board (it’s a Lift board and that’s what they do too). Not a huge deal since I just lay a little further back on the board and let more of the front be exposed to air and once I’m planning and on the foil it isn’t an issue. I just wonder about teaching newbies who want to try my board.
Overall @JamieJiang has been there answering my emails and assisting me. Things I would like to see in the remote: State of charge battery percentage, voltage, temperature option in fahrenheit (F).
So I have now some successfully rides with my new build and the VX3.
I have some problems
the set switch on the left side is easy switch and often when I climb on the board I switch it and wondering because I had no power.
the signal from the Antenna is very poor. At moment is not possible to ride my small 140er Mala . Because when I lie on the board, the Receiver not get a signal. I use also the external Antenna extension from Maytech, it is little bit better but still not okay. Did anyone know, when I move the Antenna more in front of my inflatable, the Box is made with 4mm Alu, if the Signal goes across the Aluminum?
How to activate the Cruise controll?
I set my Remote to a 14s configuration. But when I am foiling, the Display shows the Akkus are empty but it is not. Seems to me that Flipsky calculated the Batteriestatus with a Lipo configuration. Best is to be set the type of the Akkus in the Remote
I bought newest version and i have a few question:
What is the meaning of Speed mode: High, Medium, Low, expressed on the right side of display as H, M, L.
Does the throttle have higher resolution in low range? Is the maximum power or phase or battery current limited in some way?
We can’t without them. I asked them and they told me that we have to send the remote back to china in order they upgrade it. It cannot be done remotely unfortunately…
Summer is here, no time to send it back now. It will wait till winter for me
that’s not good!
To, generaly i like the Remote. I ride theme now around 10 times.
My generaly problem ist that i need more steps when you push tha gas.
My second big problem is the strongnes with the antenna7receiver. A little bit water and the connection cuted. I use also now a external antenna but sometime i think it is more bad…