Our first build has been in progress for around 18 months. Went through a few iterations of boards, motors, props, etc. Ended up coming in at around AU$2,500 all told.
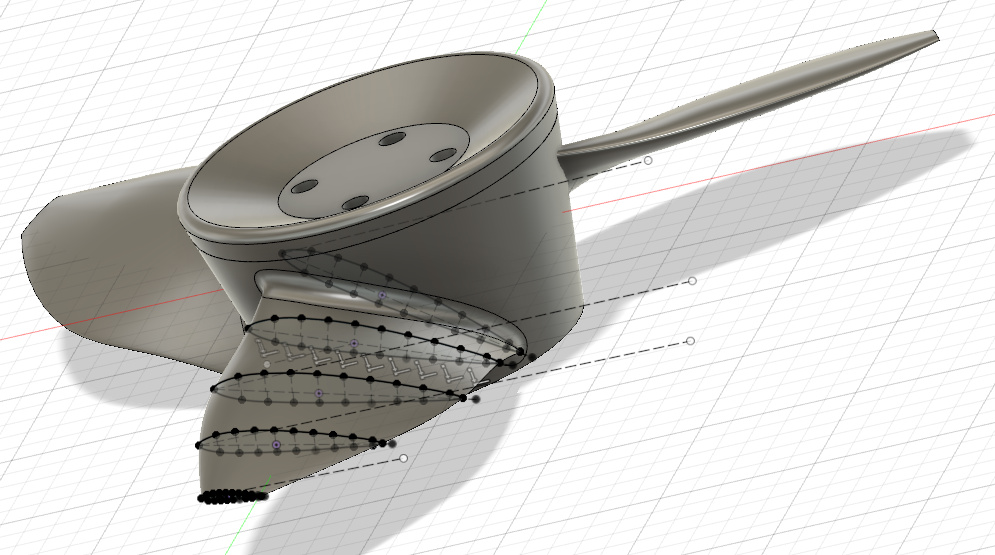
Went through quite a few iterations on the propulsion system. Ended up going with a 150mm diameter 3.5" pitch 3-blade prop printed in PLA. Design is custom and pitch of blades is defined parametrically. Use some filler to prime and sand to get a good smooth finish.
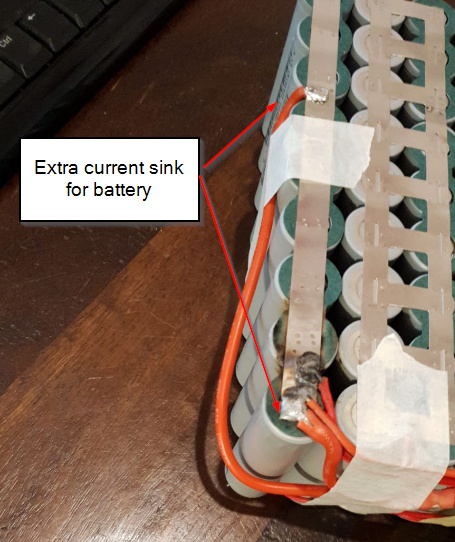
The battery we got from Ali Express was a bit dodgy (LiitoKalo brand). All the current is sinking out of the nickel strips which are only rated for around 10A. Ended up having to take it apart and rewire it after we noticed some heat damage. Also the battery was sold as 30Ah (ie 3.3Ah per cell) but actual capacity was 20Ah (ie each cell said 2.2Ah).
This is the controller and ESC - seems to be alright for the price. The controller in particular does not seem waterproof at first glance, however I took it apart and was impressed with the build: no mechanical switches or connectors (uses magnets and reed switches/hall effect sensors), wireless charging, and circuit covered in resin.
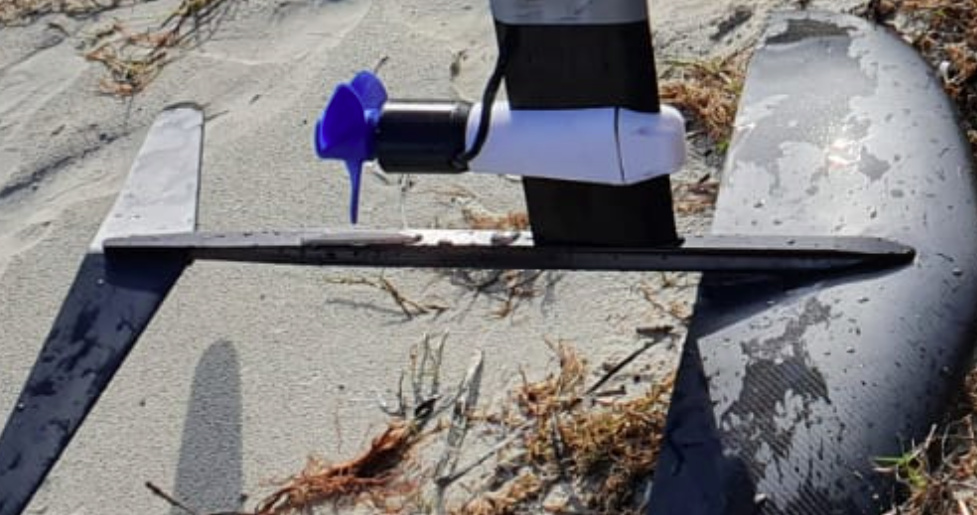
This shows arrangement of direct drive outrunner mounted to mast. The battery and ESC fit inside this waterproof yellow box which is strapped to the back of the board. It’s worked out quite well that the whole propulsion system is pretty much a bolt-on to any foil-board setup.
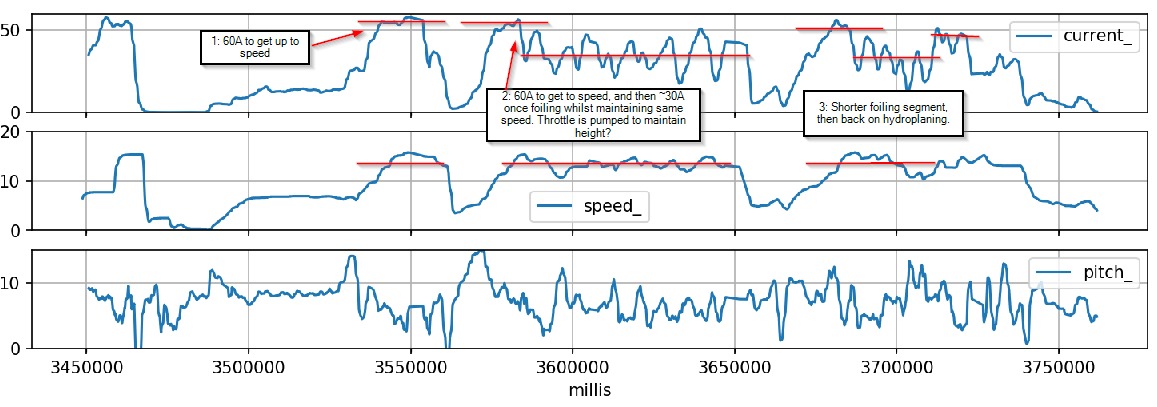
Still learning how to ride it, but seems to be pulling about 60A to get up to speed and 30A to keep going once foiling. Seems to get foiling at very slow speed around 15km/h; we do have quite a large foil on it.
Nice project.
Oh, you’re using the Seashark from this Chinese ESC brand called Favourite (fvt for short) , 12s compatible. They have 120A cont/240A burst ESC for 80usd and a 200Acont/ 350burst ESC for 116usd.
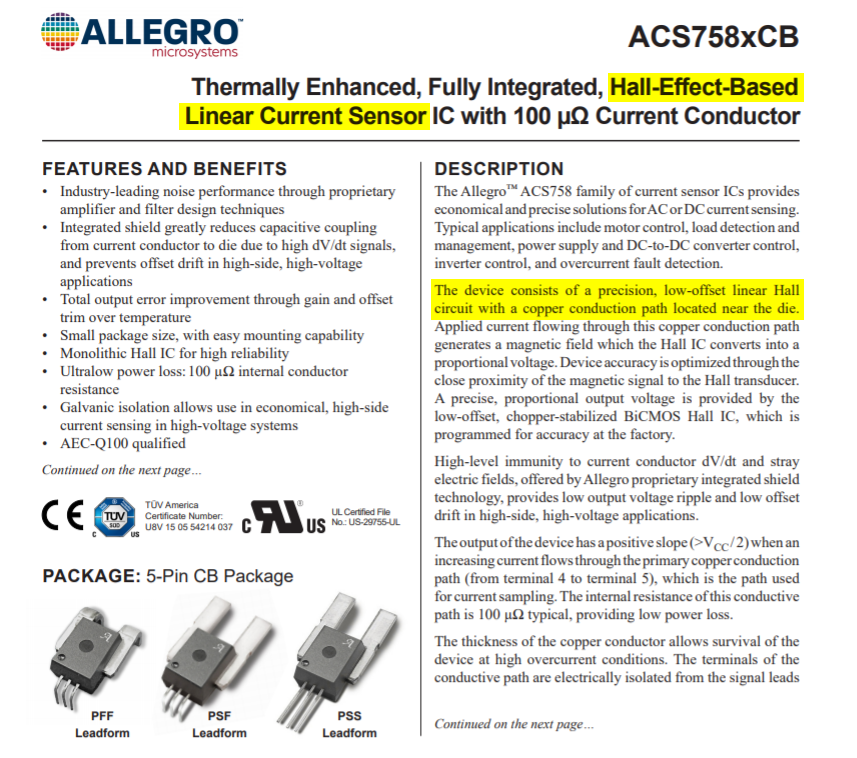
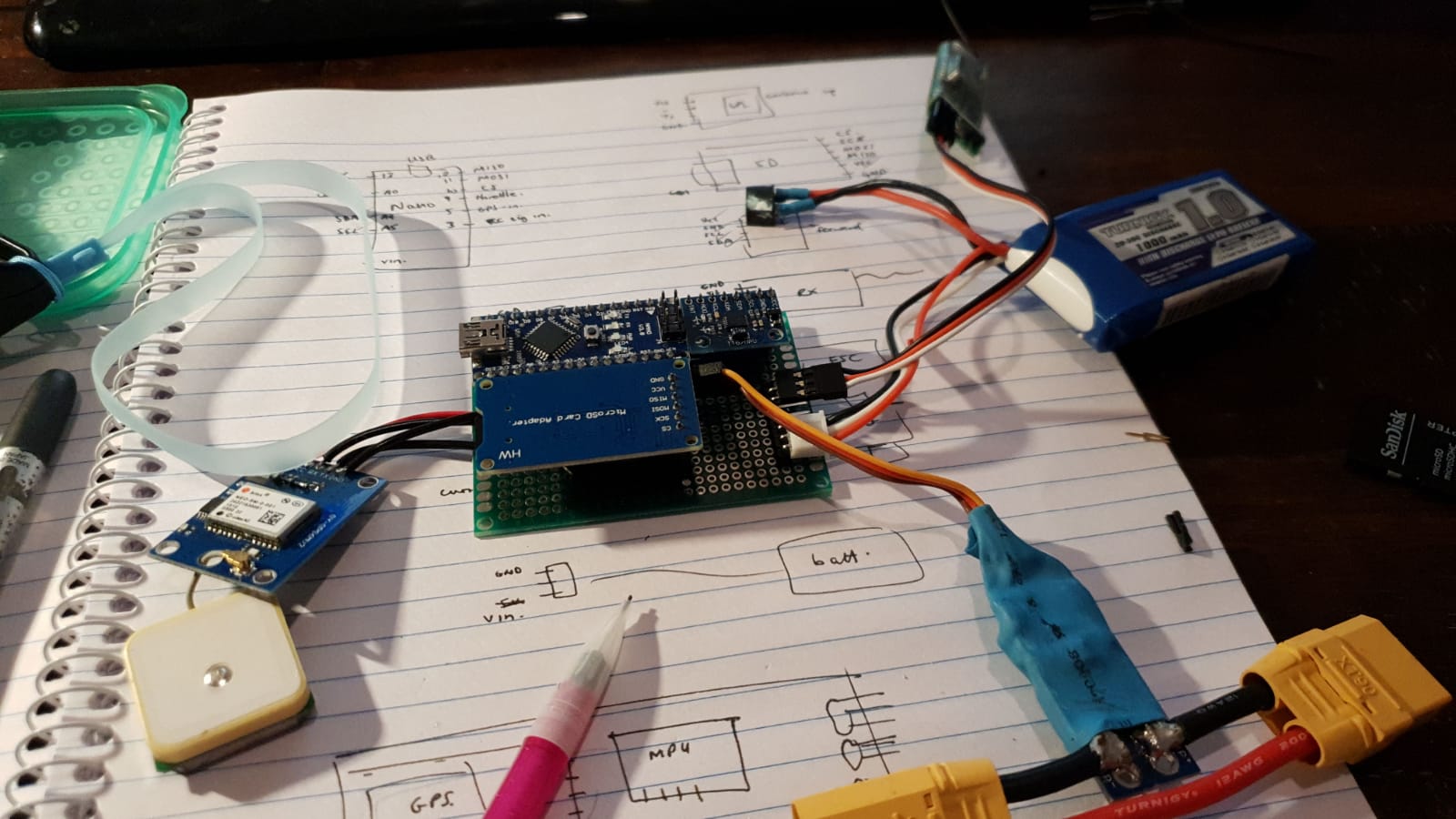
Yes separate data logger which is custom Arduino build. MicroSD card module, hall effect current sensor, ublox GPS, MPU6050 IMU + kalman filter running on Arduino.
Another nice project into the main project.
Many people here might be interested If you don’t mind me asking, to what amount did all those elements sum up ?
Do me a favour and yous a hall current sensor. I used the same module once and I had a nice fire near my battery pack. Wouldn’t recommend the sensor at all. Also hall current sensor are fairly accurate. I can get readings 0,2A± exact.
ACS758 is hall-effect current sensor as far as I knew. Interesting you had a fire with this sensor, has been pretty reliable for me for a number of applications.
yep it is a hall sensor, problem is that the current needs to flow through the part. When you have a split core hall sensor you dont need any soldering and it is much safer, as you dont have a direct connection. This is just my personal expreience.
Very cool project, great results, I like the simplicity of using outrunners.
You said you’re using a 8384 motor? Did you mean 6384?
One more thing about the prop, which nozzle size you printed with?
How many hours of print?
Thanks!
Thanks!
Yes outrunner has been going well so far. Every time after we use it we take it apart, wash in fresh water and spray with WD-40. So far we haven’t seen any major corrosion issues.
Yes that is a typo - 6384 motor is correct.
Prop was printed with a very standard printer (Solidoodle 2) which I believe default nozzle size is 0.4mm. It was around 4.5 hour print.
Given your voltage, KV, and prop-pitch, I calculate that you should get a theoretical speed of 19.1 mph; and guessing a real-world speed of 15 mph under load. Does that sound right?
Hey yep that’s what I get for theoretical speed.
We’ve got a very large foil (1900cm2), so it gets foiling at 16km/h (10mph), so haven’t tried taking it faster than that yet.
I’m in the final stages of a very similar setup like yours: 6384 120kV with 10S battery. I chose the Seashark ESC since it worked in your setup, but got the 200A version for some extra headroom, since it is not a top shelf ESC. It looks like Favourite is out of business, at least the website is down for some time, and it was challenging to find USB Link SW for the ESC. The version I got connects to the ESC via the USB Link adapter and it seems to be speaking with the ESC, returning the firmware version (V3.00_210707), and returning OK when trying to change parameters, but when reading settings, the settings are not changed. Since default throttle is FWD/REV, the motor starts spinning when system is powered up, and stops only when throttle (same as yours) is increased a bit. Which is a useless and dangerous setting.
So the question is: How did you manage to program your controller? I know there is a box programmer available instead of the USB Link I have, but hope the problem lies in the SW (brushless software usb link V1.00) or the FW, so if you have any other versions I would be very thankful to get some tips.
UPDATE! I managed to change to FWD only by using the throttle programming method, listening to the beeps from the motor. Interestingly plugging in the USB Link to check the new settings, it returns the default, which makes me suspect the USB Link isn’t meant for this ESC from Fvt, although Ali sells these two items together.
Programming the other modes like Timing ,Acceleration, Voltage cutoff is a bit more confusing, knowing which mode you have entered and what settings you actually change. Since the beeps doesn’t tell what modes are saved, it is difficult to say if you entered the right mode on all parameters (except rotation settings).









 If you don’t mind me asking, to what amount did all those elements sum up ?
If you don’t mind me asking, to what amount did all those elements sum up ?