The experience was definitely similar to when the battery runs out of power. It’s likely that the ESC detected a pulse voltage sag and switched into a low-power mode as a precaution.
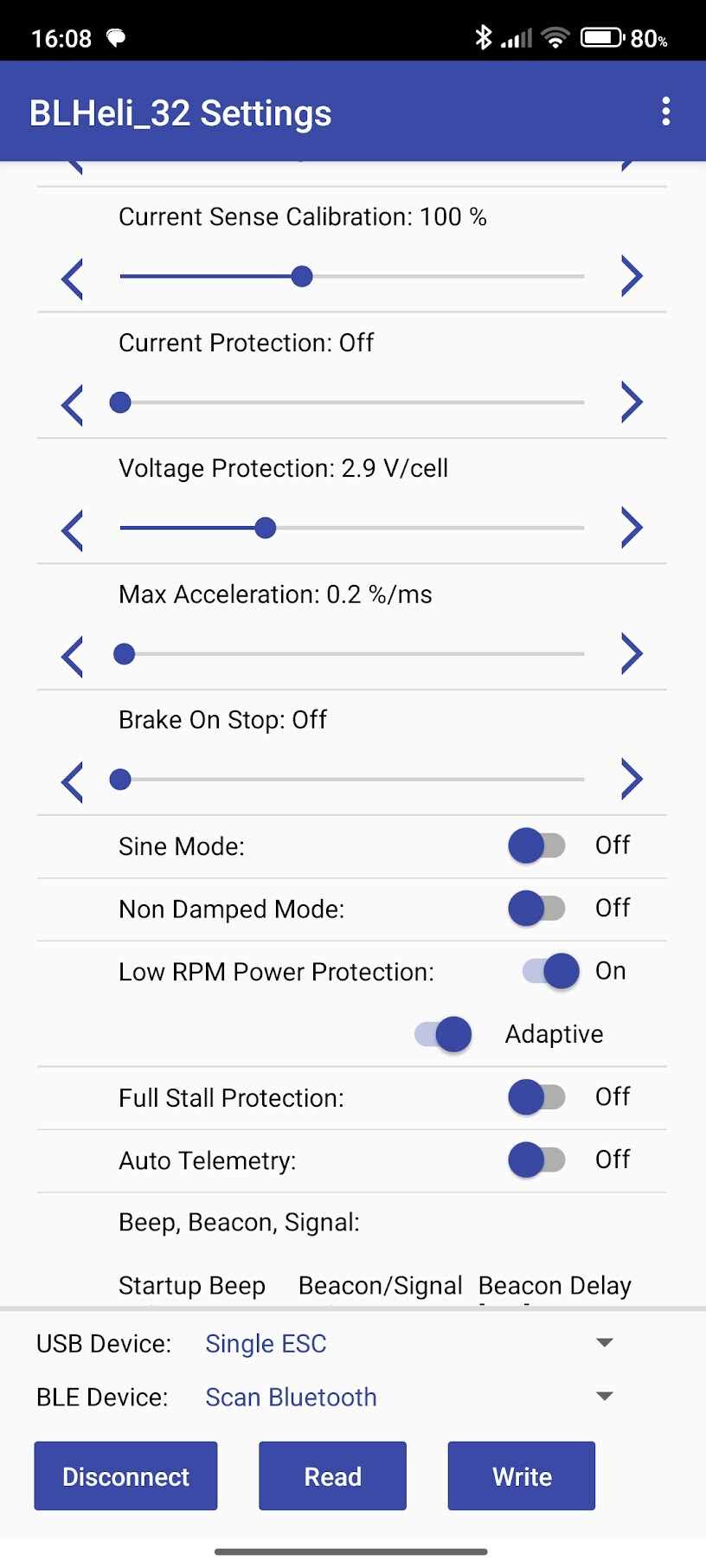
However, there are additional settings whose functions I’m not familiar with.
Did you test this new ESC?
I have 2* 200 amp blheli 32 on my tow, it works like a charm. And possible to set everything like Flycolor, I use the phone app personally
1 Like
Is there a phone app? How do you connect, a bluetooth module?
Blheli on play store only, nothing for iPhone. Use the Blheli chip and an adaptor usb-usb C on your android phone.
1 Like
Static tested today XCross 160A.
Just put the foil with the board on sand in shallow water. (Don’t do it - it filled the motor and prop with sand).
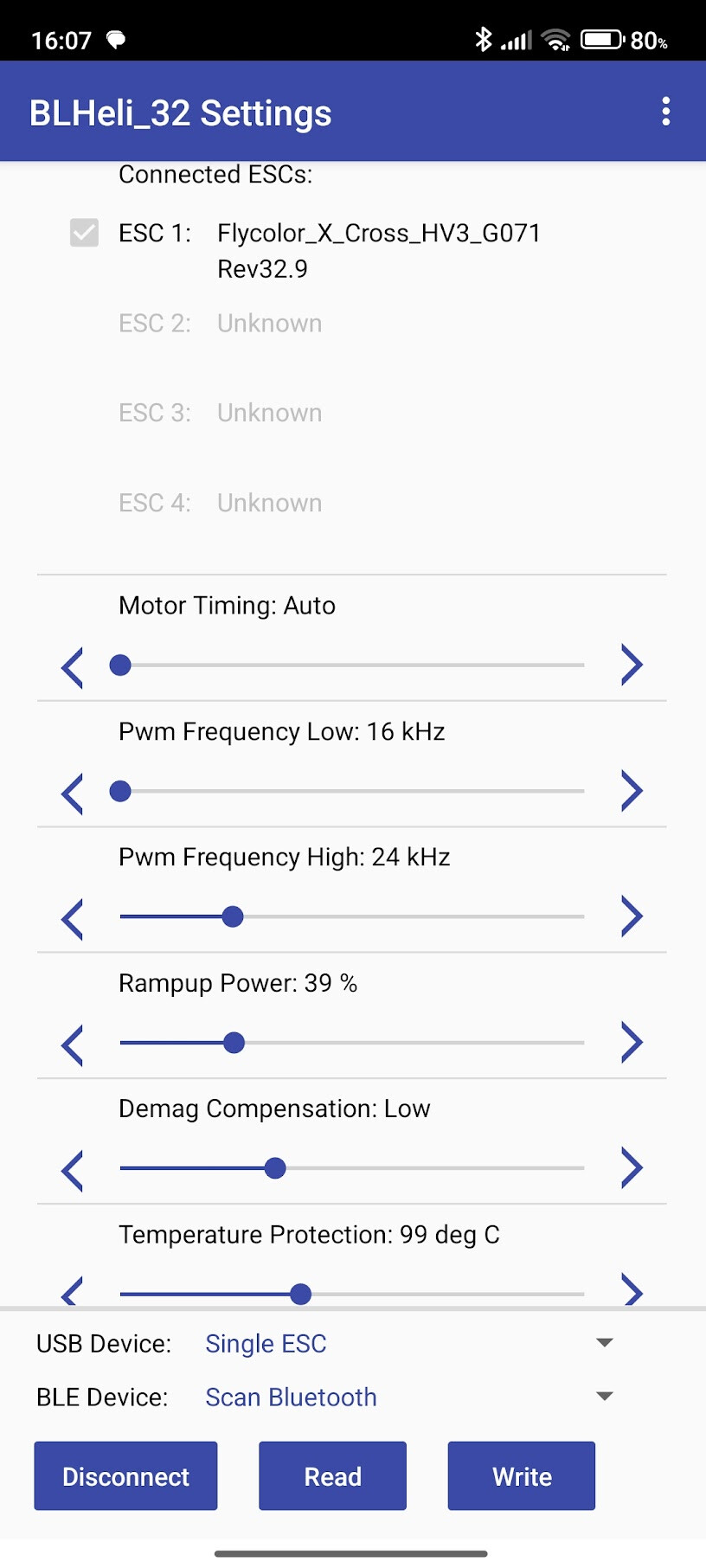
Flipsky remote L/M/H setting
Measured battery current with a clump meter at max throttle. Interesting results:
H - 150A-170A
M - 75A
L - 25A
In my setup (transparent larger than usual ABS box) I cool esc with small fans and small heatsinks.
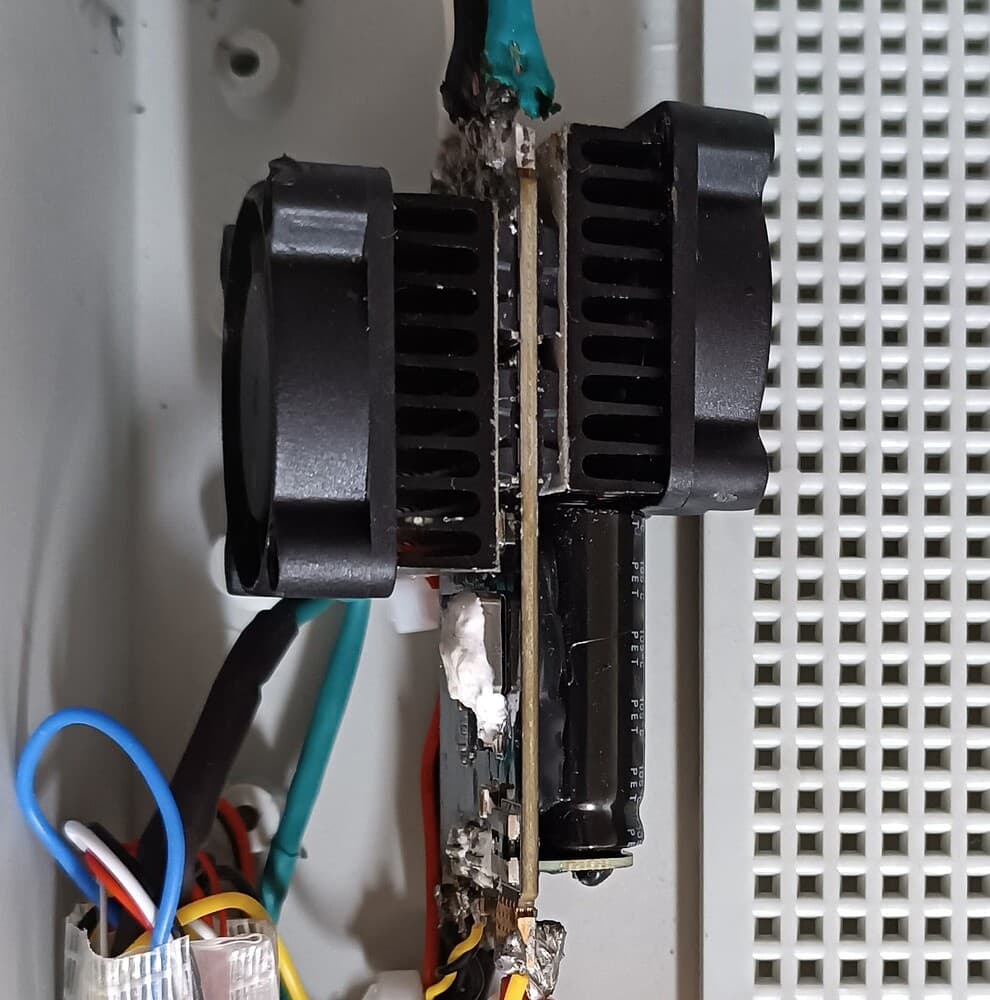
Measured heatsink temperature with a thermocouple and inside closed box temperature with some gadget.
Environment temperature 22c
Inside box temperature reached max 35c.
Always max throttle.
H - Fans or no fans - lasted 10-20s till protection kicked it - depending on the starting temperature. The heatsink temperature rised in about 10s till 50c+.
M - Lasted much longer, but eventually protection kicked in, depending on the starting temperature - it can be 1m, or 10s.
L - could run all day long without triggering protection.
Fans kept the heatsink temperature at max 50c+.
Test without fans on L+M:
L 60s, then M 10-20s and again. After 5-6 cycles heatsink temperature risen till 65c and then M could not do 20s.
Temperature protection works such that soon after limiting, the ESC frees throttle again.
Conclusions:
- Seems like current max throttle at H is too much current.
- Fans keep the temperature lower, but usually 55c which suggest that larger heatsinks and fans will do better.
- Given sufficient current no heatsink will cope with such large amount of heat generated, because of the way these mosfets are cooled.
- For continuous operation (no falls, no waves, no pumping) with intermittent starts these heatsinks inside without fans are not enough.
- My explanation why adding only one side large external heatsink helps overall - it makes the ESC PCB cooler thus less heat left for the other inside heatsink.
Next to try:
Foiling full session on M without fans still with these heatsinks.
2 Likes
This is really interesting. I have been using the 160a esc but did have problems. I have a couple spare unused and would use them again if I could be confident with them.
How are you setting L/M/H? Is this in the flipsky remote or in the blheli software? I have only used the Maytech remote so not familiar.
150A battery current is a lot more than you normally need, 75 is more like the normal max current. I wonder if these figures are correct.
Most batteries here can’t do 150A and at 12s voltage it’s 6.6kW, what was the voltage?
Ye, I am not sure as well about these figures, the clump showed it steadily. It is pretty good clump that I have used for low amps. I zeroed it beforehand.
Yes, it is very high current and power. I didn’t measure the voltage, it was hard with the waves there, but maybe I will do another session.
3p p42a molicel should handle such a current I guess… The fuse is 200A
Hi Rttn,
What did you not like?
Looking at the fact that BLHeli won’t let us flash anymore, I wanted to switch to a am32 EDC.
Bad idea?
Thanks,
Albin
1 Like
I can’t say that I didn’t like the am32, it’s just that the BlHeli32 is more familiar.
Have you been using it since? Anything that I won’t be able to do compared to BLHeli? I have been told the voltage limitation is not available?!
Thinking about getting the SEQURE 12200 with am32.
Cheers mate
I don’t have this ESC anymore, unfortunately I can’t see the differences. I think there was no throttle calibration option. Now I use Flycolor FlyDragon 150A ESC, so I have absolutely no problems with control programs )))
I have a SEQURE 12200 with new firmware running BlHeli32, which the Chinese sent me. It works very well in the air and needs to be tested in water, but it’s already very cold here.
1 Like
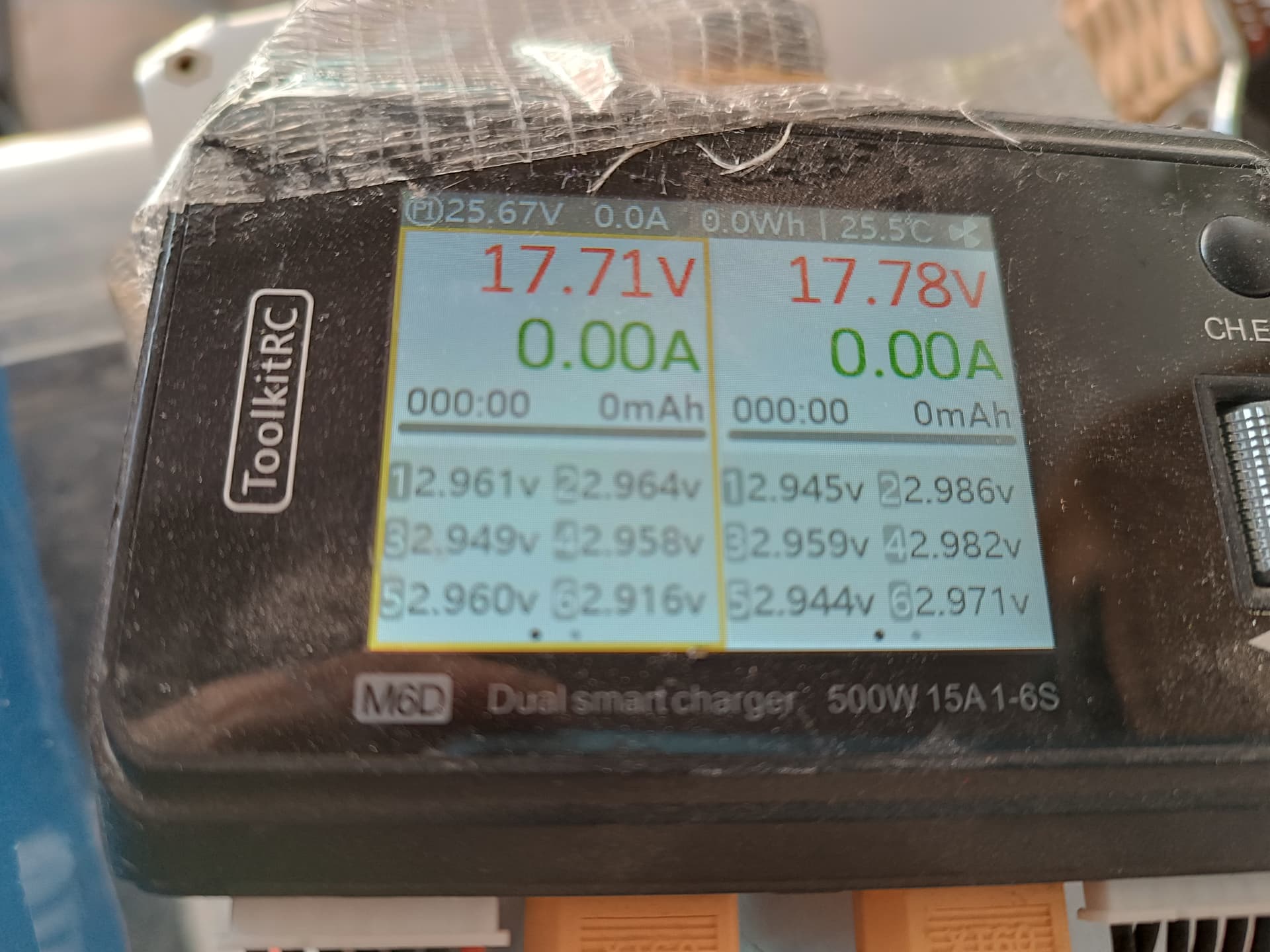
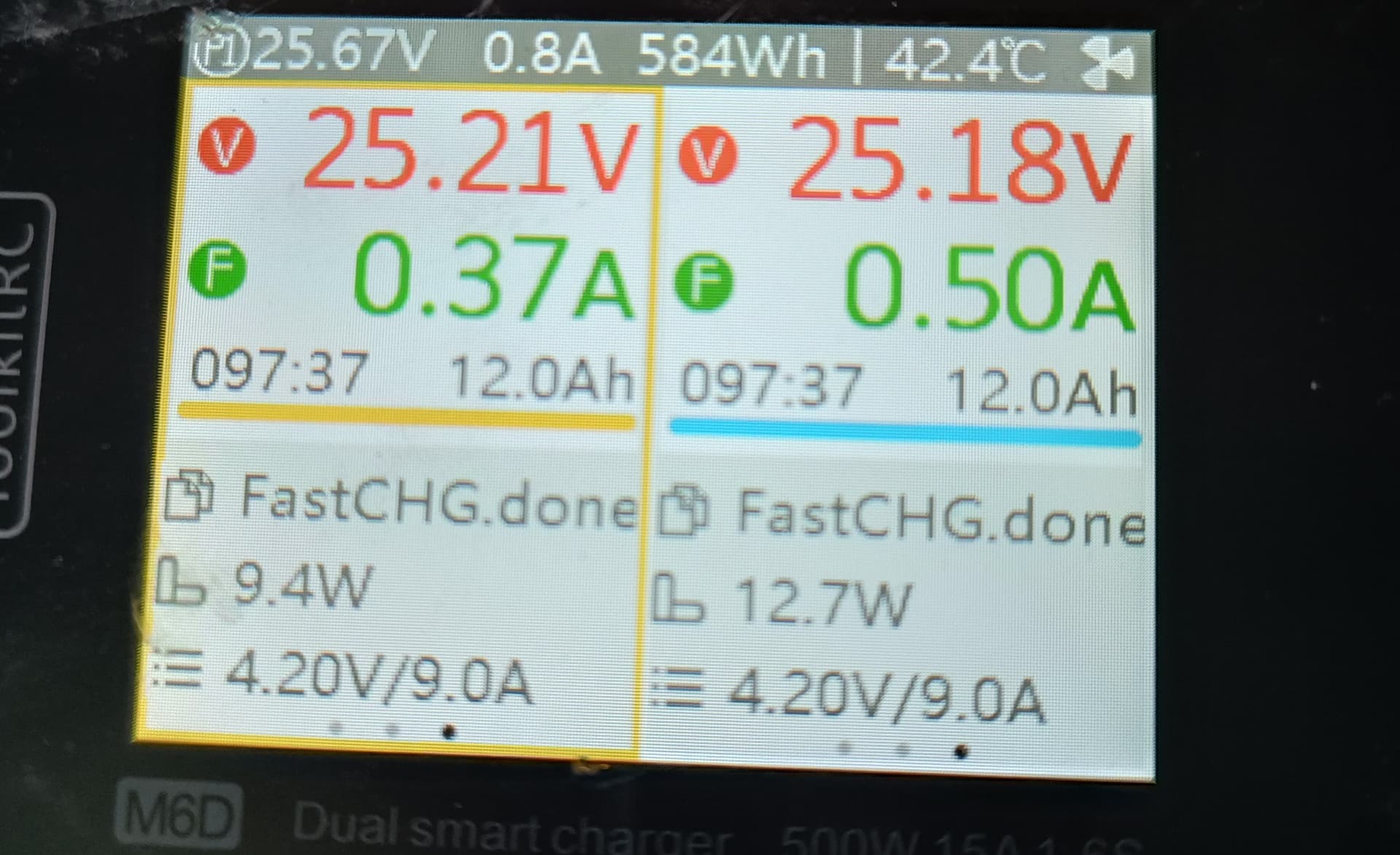
I fully drained the battery to the extreme.
The Maytech remote didn’t provide any low-battery warning, nor did the ESC reduce power.
Previously, I used a Flipsky remote, which vibrated to signal low battery, and the ESC would reduce power (with the low voltage limit set to 2.9V). This typically left the battery with a minimum of 3.5V per cell.
Usually I get 480wh, but this is 585wh - I hope it didn’t damage the battery…
1 Like
If they are P42 or 45’s you should be fine. They can go to 2.5v without damage
1 Like
Perhaps you lost track of time having fun.
Dependency on the tech totally to tell you to stop before you run dry isn’t a good practice ![]()
Telemetry Test of the Xcross BLHeli32 160A
Results
- Voltage and temperature readings are quite accurate.
- RPM measurements seem reliable, at least at lower RPMs. As I understand it, this RPM represents the actual motor speed measured by the ESC using back EMF.
- Current readings only appeared above 3A, and the multiplier varied, making the readings unreliable.
- Current consumption remained at zero throughout the test.
Setup
Connection: Connect the ESC TX pin to the UART RX pin of a microcontroller.
To increase the current, the motor was mounted on a mast, and pressure was applied using a cloth.
Micropython code for esp32-c3 supermini board:
from machine import Pin, reset, ADC,UART
import machine
import time
import network
import socket
import _thread
import json
import struct
led = Pin(8, Pin.OUT)
led.on()
is_blinking = True
def led_turn_on():
led.off()
def led_turn_off():
led.on()
import time
uart = UART(115200, bits=8, parity=None, stop=1, rx=20, tx=21)
def update_crc8(crc, crc_seed):
crc_u = crc ^ crc_seed
for i in range(8):
crc_u = (0x7 ^ (crc_u << 1)) if (crc_u & 0x80) else (crc_u << 1)
return crc_u & 0xFF
def get_crc8(buf, buflen):
crc = 0
for i in range(buflen):
crc = update_crc8(buf[i], crc)
return crc
def parse_kiss_telemetry(data):
if data and len(data) >= 10:
try:
# Verify CRC
received_crc = data[9]
calculated_crc = get_crc8(data[:9], 9)
if received_crc != calculated_crc:
print(f"CRC mismatch: received {received_crc}, calculated {calculated_crc}")
return None
temperature = data[0] # °C
voltage = (data[1] << 8 | data[2]) / 100.0 # Volts
current = (data[3] << 8 | data[4]) / 100.0 # Amps
consumption = (data[5] << 8 | data[6]) # mAh
erpm = (data[7] << 8 | data[8]) * 100 # Electrical RPM
rpm = erpm // (12//2) # For a 12-pole motor
return f"V:{voltage:06.2f} I:{current:06.1f} RPM:{rpm:06d} CON:{consumption:06d} T:{temperature:03d}C"
except Exception as e:
print(f"Error: {e}")
return None
return None
while True:
led.value(not led.value())
if uart.any():
data = uart.read()
telemetry = parse_kiss_telemetry(data)
print(telemetry)
time.sleep(1)
2 Likes
Makerbase 84100hp got only 6 mosfets , while XCross got 12 mosfets. Therefore more heat produced.
On the other it better handles cooling because mosfets soldered to the pcb and the pcb glued to the heatsink.
84200 got 12 mosfets.
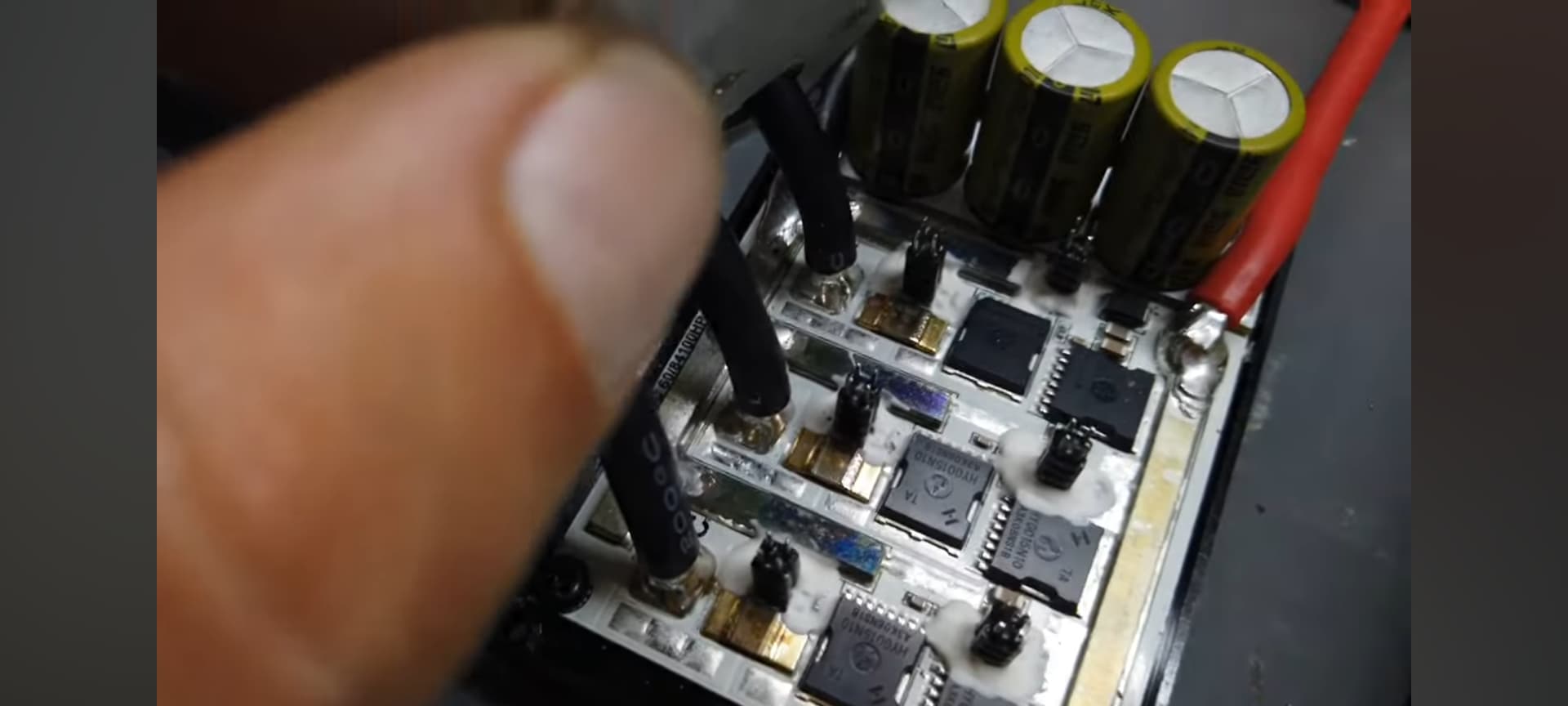
Shunts of VESC add to the heating.
Mosfets used in Makerbase vesc 84100, 84200, 75100 and Sequre esc are HYG015N10NS1TA